一种铁塔塔脚机器人自动化系统焊接设备的制作方法
1.本实用新型涉及一种焊接设备,涉及机器人自动化系统技术领域,具体涉及一种铁塔塔脚机器人自动化系统焊接设备。
背景技术:
2.输电线路铁塔简称电力铁塔,其结构特点是各种塔形均属空间桁架结构,杆件主要由单根等边角钢或组合角钢组成,整个塔由角钢、连接钢板和螺栓组成,个别部件如塔脚等由几块钢板焊接成一个组合件。输电线路铁塔的塔脚为整个输电线路铁塔结构的支撑部件,因此其结构的稳定性,直接决定了输电线路铁塔的结构稳定性和使用寿命,输电线路铁塔的塔脚为焊接组合件,现有技术中对于塔脚的生产全部采用手工焊接的方式,限于塔脚焊接的技术要求。
3.现有技术中,提出了公开号为cn215145938u,公开日为2021年12月14日的中国专利文件,来解决上述存在的技术问题,该专利文献所公开的技术方案如下:基于3机器人控制柜、可视化编程控制柜、工控机、机器人、传感器相机的自动化焊接设备,包括:3机器人控制柜、可视化编程控制柜、工控机、机器人、传感器相机,所述3机器人控制柜、可视化编程控制柜、工控机、机器人、传感器相机用于获取目标工件的3机器人控制柜、可视化编程控制柜、工控机、机器人、传感器图像信息;处理器,所述处理器与所述3机器人控制柜、可视化编程控制柜、工控机、机器人、传感器相机连接,所述处理器用于根据所述3机器人控制柜、可视化编程控制柜、工控机、机器人、传感器图像信息得到并发送操作指令;所述操作指令至少包括移动指令、夹持指令、焊接指令;夹持装置,所述夹持装置与所述处理器连接,用于根据所述夹持指令夹持所述目标工件或松开所述目标工件;机械臂,所述机械臂与所述处理器连接,所述机械臂的末端连接所述夹持装置。
4.针对上述技术在实际使用的过程中,会存在以下问题:
5.1、现有的焊接设备在使用时,都是利用人力对工件进行焊接,导致人工焊接外观不一致,使焊接质量和生产效率下降的问题;
6.2、现有的焊接设备在使用过程中,无法将工件稳定固定在机器上,导致装置在对工件进行加工时容易发生晃动,影响工件的焊接效果的问题。
技术实现要素:
7.为解决上述技术问题,本实用新型所采用的技术方案是:
8.一种铁塔塔脚机器人自动化系统焊接设备,包括u型变位机、工件、机器人控制柜、可视化编程控制柜、工控机和装置平台,所述u型变位机的底部设置有装置平台,且所述u型变位机的上方设置有工件,所述装置平台的顶部设置有机器人控制柜,且所述装置平台的顶部且位于机器人控制柜的右侧设置有可视化编程控制柜,所述装置平台的顶部且位于机器人控制柜的左侧设置有工控机,所述装置平台的顶部设置有机器人,所述机器人用于利用机器对工件进行焊接,大大减轻了劳动者强度。
9.所述u型变位机的顶部设置有零件放置台,所述零件放置台用于将工件固定在装置上。
10.本实用新型技术方案的进一步改进在于:所述工件的底部搭接在零件放置台的顶部,所述机器人控制柜的底部固定安装在装置平台的顶部,所述可视化编程控制柜的底部固定安装在装置平台的顶部。
11.采用上述技术方案,该方案中的可视化编程控制柜可根据导入模型的关键参数,生成模型样本,通过在样本中选取焊接路径点,生成可直接用于焊接的机器人程序;其中,焊接工艺的相关参数可结合实际通过焊接工艺包进行修改;过渡点可在机器人程序中自由增加;焊接执行中的工作状态可通过模块界面获取并进行监控.该设计可以提高焊接工艺在工作现场的应用效率,简化功能使用的复杂程度,同时保持较高的程序编辑自由度。
12.本实用新型技术方案的进一步改进在于:所述工控机的底部固定安装在装置平台的顶部,且所述工控机的内侧设置有水箱,所述水箱的底部固定安装在工控机的内侧。
13.采用上述技术方案,该方案中的工控机可以实现激光预扫描,无需施教,数据可回传给机器人,实现了多层多道焊接。
14.本实用新型技术方案的进一步改进在于:所述工控机的内侧设置有焊接电源,所述焊接电源的底部固定安装在工控机的内侧,所述工控机的顶部设置有显示器,所述显示器的底部固定安装在工控机的顶部。
15.本实用新型技术方案的进一步改进在于:所述机器人的底部固定安装在装置平台的顶部,且所述机器人的顶部设置有传感器,所述传感器的底部活动安装在机器人的顶部。
16.采用上述技术方案,该方案中的通过传感器实时测量坡口信息,来自动匹配电流电压以及机器人摆动参数实现焊接自适应,可以避免人工调整带来的偏差、减少工人劳动强度、提高焊接质量,又解决了折中选取焊接工艺参数带来的焊接质量不稳定等问题。
17.本实用新型技术方案的进一步改进在于:所述零件放置台的底部固定安装在u型变位机的顶部,且所述零件放置台的顶部两侧设置有固定架,所述固定架的底部固定安装在零件放置台的顶部,且所述固定架的内侧设置有控制器,所述控制器的外侧固定安装在固定架的内侧。
18.本实用新型技术方案的进一步改进在于:所述控制器的内侧设置有推升机构,所述推升机构的外侧固定安装在控制器的内侧,所述推升机构的内侧设置有连接板,所述连接板的外侧固定安装在推升机构的内侧,且所述连接板的内侧设置有零件夹固板,所述零件夹固板的外侧固定安装在连接板的内侧。
19.采用上述技术方案,该方案中的控制器可以控制推升机构向内侧推进,从而使连接板带动零件夹固板将零件放置台上的工件进行固定,防止工件在扫描时发生晃动。
20.由于采用了上述技术方案,本实用新型相对现有技术来说,取得的技术进步是:
21.1、本实用新型提供一种铁塔塔脚机器人自动化系统焊接设备,为了具备机器人控制柜、可视化编程控制柜、工控机、机器人、传感器,解决现有的焊接设备在使用时,都是利用人力对工件进行焊接,导致人工焊接外观不一致,使焊接质量和生产效率下降的问题,通过以上结构结合以达到使焊接设备在使用过程中,使装置能够利用机器对工件进行焊接,大大减轻了劳动者强度,焊接质量明显提高,减少人员伤害,实现自动焊接,精确度高误差小,方便解决了人工焊接过程中出现焊接外观不一致的问题,通过焊接质量和生产效率。
22.2、本实用新型提供一种铁塔塔脚机器人自动化系统焊接设备,为了具备推升机构、零件夹固板、连接板、控制器,解决现有的焊接设备在使用过程中,无法将工件稳定固定在机器上,导致装置在对工件进行加工时容易发生晃动,影响工件的焊接效果的问题,通过以上结构结合以达到使焊接设备在使用过程中,使装置可以将工件固定在装置上,防止工件在扫描时发生晃动。
附图说明
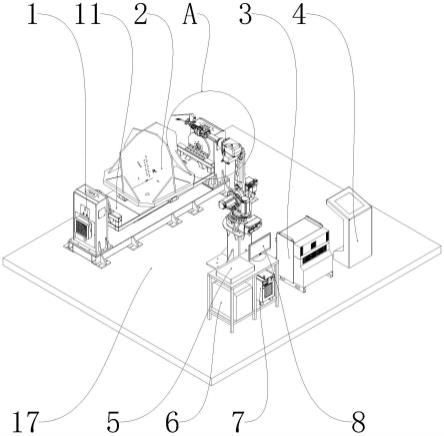
23.图1为本实用新型的立体结构示意图;
24.图2为本实用新型的部分放大结构示意图;
25.图3为本实用新型的部分立体结构示意图。
26.图中:1、u型变位机;2、工件;3、机器人控制柜;4、可视化编程控制柜;5、工控机;6、水箱;7、焊接电源;8、显示器;9、机器人;10、传感器;11、零件放置台;12、固定架;13、推升机构;14、零件夹固板;15、连接板;16、控制器;17、装置平台。
具体实施方式
27.下面结合实施例对本实用新型做进一步详细说明:
28.实施例1
29.如图1-3所示,本实用新型提供了一种铁塔塔脚机器人自动化系统焊接设备,包括u型变位机1、工件2、机器人控制柜3、可视化编程控制柜4、工控机5和装置平台17,u型变位机1的底部设置有装置平台17,且u型变位机1的上方设置有工件2,装置平台17的顶部设置有机器人控制柜3,且装置平台17的顶部且位于机器人控制柜3的右侧设置有可视化编程控制柜4,可视化编程控制柜4可根据导入模型的关键参数,生成模型样本,通过在样本中选取焊接路径点,生成可直接用于焊接的机器人程序;其中,焊接工艺的相关参数可结合实际通过焊接工艺包进行修改;过渡点可在机器人程序中自由增加;焊接执行中的工作状态可通过模块界面获取并进行监控.该设计可以提高焊接工艺在工作现场的应用效率,简化功能使用的复杂程度,同时保持较高的程序编辑自由度,装置平台17的顶部且位于机器人控制柜3的左侧设置有工控机5,装置平台17的顶部设置有机器人9,机器人9用于利用机器对工件2进行焊接,大大减轻了劳动者强度,u型变位机1的顶部设置有零件放置台11,零件放置台11用于将工件2固定在装置上,工件2的底部搭接在零件放置台11的顶部,机器人控制柜3的底部固定安装在装置平台17的顶部,可视化编程控制柜4的底部固定安装在装置平台17的顶部,工控机5的底部固定安装在装置平台17的顶部,且工控机5的内侧设置有水箱6,水箱6的底部固定安装在工控机5的内侧,工控机5的内侧设置有焊接电源7,焊接电源7的底部固定安装在工控机5的内侧,工控机5的顶部设置有显示器8,显示器8的底部固定安装在工控机5的顶部。
30.实施例2
31.如图1-3所示,在实施例1的基础上,本实用新型提供一种技术方案:机器人9的底部固定安装在装置平台17的顶部,且机器人9的顶部设置有传感器10,通过传感器10实时测量坡口信息,来自动匹配电流电压以及机器人摆动参数实现焊接自适应,可以避免人工调整带来的偏差、减少工人劳动强度、提高焊接质量,又解决了折中选取焊接工艺参数带来的
焊接质量不稳定等问题,传感器10的底部活动安装在机器人9的顶部,零件放置台11的底部固定安装在u型变位机1的顶部,且零件放置台11的顶部两侧设置有固定架12,固定架12的底部固定安装在零件放置台11的顶部,且固定架12的内侧设置有控制器16,控制器16的外侧固定安装在固定架12的内侧,控制器16的内侧设置有推升机构13,控制器16可以控制推升机构13向内侧推进,从而使连接板15带动零件夹固板14将零件放置台11上的工件进行固定,防止工件在扫描时发生晃动,推升机构13的外侧固定安装在控制器16的内侧,推升机构13的内侧设置有连接板15,连接板15的外侧固定安装在推升机构13的内侧,且连接板15的内侧设置有零件夹固板14,零件夹固板14的外侧固定安装在连接板15的内侧。
32.下面具体说一下该铁塔塔脚机器人自动化系统焊接设备的工作原理。
33.如图1-3所示,在使用时,机器人前端激光传感器对工件进行焊道扫描,找出焊道位置,然后把信息反馈给机器人,在可视化参数编程里面可以设计不同的焊道对应不同的焊接参数,然后由机器人进行多层多道自动焊接,保证焊接技术要求。
34.上文一般性的对本实用新型做了详尽的描述,但在本实用新型基础上,可以对之做一些修改或改进,这对于技术领域的一般技术人员是显而易见的。因此,在不脱离本实用新型思想精神的修改或改进,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1