采用自动上丝装置的焊接机器人的制作方法
1.本实用新型主要涉及x的技术领域,具体涉及采用自动上丝装置的焊接机器人。
背景技术:
2.送丝是焊接过程中非常重要的一个操作环节,机器人工作时,持续的送丝,机器人方能持续的工作。
3.根据申请号为cn201711009818.x的专利文献所提供的一种焊丝送丝装置可知,该送丝装置包括第一焊丝盘、第二焊丝盘、第一驱动机构、第一导向管、第二驱动机构、第二导向管以及第三驱动机构;第一驱动机构、第二驱动机构以及第三驱动机构用于驱动焊丝向下运行;第一焊丝盘上的焊丝可依次经第一驱动机构、第一导向管和第三驱动机构运行至焊枪;第二焊丝盘上的焊丝可依次经第二驱动机构、第二导向管和第三驱动机构运行至焊枪;第二导向管的焊丝出口的下方设有能够将第一焊丝盘上的焊丝和第二焊丝盘上的焊丝焊接的点焊机构。采用该发明的焊丝送丝装置,能够实现连续送丝,且能够防止焊丝跑偏,从而提高生产效率和焊缝质量。
4.上述送丝装置能够实现连续送丝,且能够防止焊丝跑偏,从而提高生产效率和焊缝质量,但传统的送丝装置缺少对焊丝盘上的焊丝的引导,导致松弛的焊丝进入送丝管后,容易影响机器人上丝过程中的稳定性。
技术实现要素:
5.本实用新型主要提供了采用自动上丝装置的焊接机器人用以解决上述背景技术中提出的技术问题。
6.本实用新型解决上述技术问题采用的技术方案为:
7.采用自动上丝装置的焊接机器人,包括工作台,所述工作台的上表面连接有底座,所述底座的上表面连接有机械臂,所述底座的一侧连接有上丝机构;
8.所述上丝机构包括安装于所述底座一侧表面的支撑架,设于所述支撑架远离底座一侧、且用于安装焊丝盘的安装筒,以及设于所述支撑架远离底座的一端的送丝管;
9.所述上丝机构还包括设于所述安装筒内部的顶端的导丝组件,以及与所述支撑架靠近所述送丝管的一端相连接的松弛度监测组件。
10.进一步的,所述导丝组件包括安装于所述安装筒内部顶端的滑动轨,与所述滑动轨滑动连接的推杆,以及与所述推杆远离滑动轨的一端相连接、且与焊丝相抵接的滑轮。
11.进一步的,所述滑动轨的内部设有两个弹簧,两个所述弹簧以推杆为中心轴对称设置,所述弹簧与所述推杆相抵接。
12.进一步的,所述滑动轨的内部转动连接有旋转轴,所述旋转轴延伸至外部的一端连接有电机,所述电机安装于所述电机的一侧表面。
13.进一步的,所述推杆包括套设于所述旋转轴外部的滑动套筒,以及安装于所述滑动套筒外表面的杆体,所述杆体延伸至外部的一端通过转轴与所述滑轮相连接。
14.进一步的,所述旋转轴延伸至滑动套筒的外表面设有齿槽,所述齿槽的槽体内滑动连接有滚珠,所述滚珠安装于所述滑动套筒的内表面。
15.进一步的,所述松弛度监测组件包括安装于所述支撑架一侧表面的第一光电传感器,以及设于所述第一光电传感器一侧、且安装于支撑架外表面的第二光电传感器,所述第一光电传感器和第二光电传感器沿水平方向交错设置。
16.与现有技术相比,本实用新型的有益效果为:
17.本实用新型能够对上丝过程中焊丝的状态进行监测,且在焊丝松弛时,将焊丝重新拉直,以提高上丝过程中的稳定性,具体为:通过交错设置的第一光电传感器和第二光电传感器形成光电感应门,感应焊丝是否松弛,通过旋转轴带动其上套设的滑动套筒进行旋转,滑动套筒带动推杆进行角位移,推杆带动滑轮进行角位移,以使滑轮推动焊丝重新拉直。
18.以下将结合附图与具体的实施例对本实用新型进行详细的解释说明。
附图说明
19.图1为本实用新型的结构示意图;
20.图2为本实用新型的轴测图;
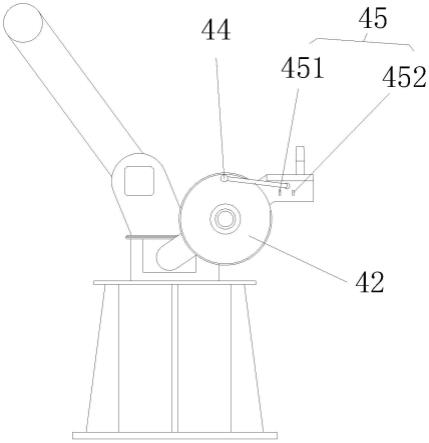
21.图3为本实用新型的左视图;
22.图4为本实用新型导丝组件的结构示意图。
23.图中:10、工作台;20、底座;30、机械臂;40、上丝机构;41、支撑架;42、安装筒;43、送丝管;44、导丝组件;441、滑动轨;4411、旋转轴;4412、电机;4413、齿槽;442、推杆;4421、滑动套筒;4422、杆体;4423、滚珠;443、滑轮;45、松弛度监测组件;451、第一光电传感器;452、第二光电传感器。
具体实施方式
24.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更加全面的描述,附图中给出了本实用新型的若干实施例,但是本实用新型可以通过不同的形式来实现,并不限于文本所描述的实施例,相反的,提供这些实施例是为了使对本实用新型公开的内容更加透彻全面。
25.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上也可以存在居中的元件,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件,本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
26.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常连接的含义相同,本文中在本实用新型的说明书中所使用的术语知识为了描述具体的实施例的目的,不是旨在于限制本实用新型,本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
27.实施例,请着重参照附图1-4,采用自动上丝装置的焊接机器人,包括工作台10,所述工作台10的上表面连接有底座20,所述底座20的上表面连接有机械臂30,所述底座20的一侧连接有上丝机构40;
28.所述上丝机构40包括安装于所述底座20一侧表面的支撑架41,设于所述支撑架41远离底座20一侧、且用于安装焊丝盘的安装筒42,以及设于所述支撑架41远离底座20的一端的送丝管43;
29.所述上丝机构40还包括设于所述安装筒42内部的顶端的导丝组件44,以及与所述支撑架41靠近所述送丝管43的一端相连接的松弛度监测组件45。
30.具体的,请着重参照附图3和4,所述导丝组件44包括安装于所述安装筒42内部顶端的滑动轨441,与所述滑动轨441滑动连接的推杆442,以及与所述推杆442远离滑动轨441的一端相连接、且与焊丝相抵接的滑轮443;
31.所述滑动轨441的内部设有两个弹簧444,两个所述弹簧444以推杆442为中心轴对称设置,所述弹簧444与所述推杆442相抵接;
32.进一步的,通过滑动轨441引导推杆442的滑动,以使推杆442上的滑轮443配合焊丝进行移动,且通过滑轮443的滚动引导焊丝进入送丝管43,从而防止焊丝焊丝偏移;
33.进一步的,通过弹簧444推动推杆442,以使推杆442借助其上引导焊丝的滑轮443移动后,通过弹簧444的推动,以使推杆442带动滑轮443保持与焊丝的抵接。
34.具体的,请着重参照附图3和4,所述滑动轨441的内部转动连接有旋转轴4411,所述旋转轴4411延伸至外部的一端连接有电机4412,所述电机4412安装于所述电机4412的一侧表面;
35.所述推杆442包括套设于所述旋转轴4411外部的滑动套筒4421,以及安装于所述滑动套筒4421外表面的杆体4422,所述杆体4422延伸至外部的一端通过转轴与所述滑轮443相连接;
36.所述旋转轴4411延伸至滑动套筒4421的外表面设有齿槽4413,所述齿槽4413的槽体内滑动连接有滚珠4423,所述滚珠4423安装于所述滑动套筒4421的内表面;
37.进一步的,电机4412带动与其输出轴相连接的旋转轴4411进行旋转,通过旋转轴4411带动其上套设的滑动套筒4421进行旋转;
38.进一步的,杆体4422跟随滑动套筒4421在旋转轴4411上的滑动而移动;
39.杆体4422设置为大小头结构,且大头端设置容纳滑轮443的凹槽,凹槽内设置以滑轮443为中心轴对称设置的弹性体,从而通过弹性体推动滑轮443始终与焊丝保持抵接;
40.进一步的,通过滚珠4423在齿槽4413内的滚动,从而减小滑动套筒4421在旋转轴4411上滑动的阻力,且通过卡入齿槽4413内的滚珠4423,使得旋转轴4411进行旋转时,滑动套筒4421跟随其进行旋转。
41.具体的,请着重参照附图2,所述松弛度监测组件45包括安装于所述支撑架41一侧表面的第一光电传感器451,以及设于所述第一光电传感器451一侧、且安装于支撑架41外表面的第二光电传感器452,所述第一光电传感器451和第二光电传感器452沿水平方向交错设置;
42.进一步的,通过交错设置的第一光电传感器451和第二光电传感器452形成光电感应门,从而在焊丝松弛时,能够被第一光电传感器451和第二光电传感器452感应到,以使该信息传递至与其连接的控制器内后供该控制器进行判断,从而通过控制器及时控制电机4412,带动推杆442旋转而拉直焊丝。
43.本实用新型的具体操作方式如下:
44.安装筒42内的送丝盘内的焊丝不断送出而进入机械臂30的焊枪附近时,通过交错设置的第一光电传感器451和第二光电传感器452形成光电感应门,从而在焊丝松弛时,能够被第一光电传感器451和第二光电传感器452感应到;
45.当控制器接收到第一光电传感器451和第二光电传感器452监测到焊丝松弛时,电机4412带动与其输出轴相连接的旋转轴4411进行旋转,通过旋转轴4411带动其上套设的滑动套筒4421进行旋转,滑动套筒4421带动推杆442进行角位移,推杆442带动滑轮443进行角位移,以使滑轮443推动焊丝重新拉直;
46.在引导焊丝的过程中,通过弹簧444推动推杆442,以使推杆442借助其上引导焊丝的滑轮443移动后,通过弹簧444的推动,以使推杆442带动滑轮443保持与焊丝的抵接。
47.上述结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的这种非实质改进,或未经改进将本实用新型的构思和技术方案直接应用于其他场合的,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1