螺环自动拧紧装置的制作方法
1.本实用新型涉及一种螺环自动拧紧装置,主要用于军工行业中通过螺环拧紧实现两舱段连接时的操作。
背景技术:
2.目前军工行业具有舱段间通过螺环拧紧连接的产品,其中螺环设置在其中一个舱段的一端,螺环可在该舱段上转动,但限制了轴向位移,螺环转动时,螺环上的螺纹与另一舱段一端的螺纹相互啮合,达到两舱段通过螺环拧紧连接的目的。在两舱段间拧紧时一般采用人工对螺环进行拧紧,效率低,费时费力,拧紧力矩不统一。
技术实现要素:
3.本实用新型的目的是提供一种工作效率高、省时省力、拧紧力矩一致、稳定性好、具有自锁性的螺环自动拧紧装置,克服现有技术的不足。
4.本实用新型的螺环自动拧紧装置,包括固定在机架上的基板、抱夹组件、拧紧组件、防转组件及随动组件;
5.所述的抱夹组件包括安装在立柱上的水平设置的两根相互平行的滑轨,在每根滑轨上均配有两组滑动块,滑动块连接夹臂,夹臂的端头内侧设有对称的夹块,左右两侧的滑动块分别与双杆气缸两端的活塞杆相接,双杆气缸安装有立柱上,立柱下端固定在基板上;或者左右两侧的滑动块分别与左旋和右旋螺母连接,左旋和右旋螺母与左旋和右旋丝杆连接,该丝杆与旋转驱动机构连接;
6.所述的拧紧组件包括支撑板,支撑板上有中心孔,在中心孔周边处通过螺栓固定有环形的支撑座,支撑座上面通过螺栓固定有回转支撑,回转支撑上面固定有连接盘,连接盘上面坐落有转盘,转盘与连接盘之间设有径向限位的相互吻合的止口,转盘的侧边接有把手,在连接盘上面的径向通道内设有拧紧销机构,所述的拧紧销机构包括拧紧销套,在拧紧销套内插装有拧紧销并通过紧固螺钉紧固,拧紧销套上面有柱销,柱销插入转盘上面的弧形槽内,通过把手转动转盘时弧形槽拨动柱销使拧紧销机构在连接盘上面的径向通道内移动;在支撑板的侧边固定有立板,拧紧枪通过安装座安装在立板上,与拧紧枪相接的大齿轮通过大齿轮轴承座转动连接在支撑板上,编码器通过轴承支撑安装在支撑板上并接有小齿轮,所述的大齿轮和小齿轮均与回转支撑相啮合;立板上固定有连接块,连接块的内孔固定有丝母;
7.所述的随动组件包括安装在机架上的电机减速器和支板,电机减速器的输出轴接与丝母相配的丝杠,支板侧面固定有竖向设置的滑道,与滑道相配的滑块固定在所述立板的侧面,电机减速器可通过丝杠、丝母、连接块驱动支撑板沿滑道上下滑动;
8.所述的防转组件包括安装在机架上的定位盘,在定位盘上面设有与下舱段底端面上的u形口相配的定位块和对上舱段径向限位的径向挡块。
9.所述的转盘上有t型槽,t型螺栓穿过t型槽与连接盘螺纹连接,转盘转动时t型螺
栓的端头可在t型槽内滑动,对转盘和连接盘轴向限位。
10.本实用新型的螺环自动拧紧装置,柱状产品的下舱段和上舱段先由人工通过螺环初步连接,由机器人抓手抓取产品放置到位,即下舱段的下端头坐落在定位盘上,径向挡块挡在下舱段下端头的周边,定位块插入下舱段下端的u型口内,对产品进行径向限位并防止拧紧时受力转动。抱夹组件中双杆气缸动作,使两组滑动块同时向内移动,夹块对机器人抓手抓取的上舱段进行抱夹固定,使上舱段和下舱段竖向对正并处于同轴状态,然后电机减速器动作,带动丝杠转动,与丝杠配合的丝母及连接块上移,带动支撑板及其上的组件一起上移,到达拧紧工位,即上升到拧紧销与螺环侧面的开口槽高度一致,人工拨动把手使转盘相对于连接盘旋转,转盘上的弧形槽拨动柱销,使连接盘上的径向通道内的拧紧销机构产生径向位移,拧紧销伸出并插入到螺环侧面的开口槽内,拧紧枪动作按设定力矩值进行旋转,通过大齿轮带动连接盘旋转,带动拧紧销机构旋转,螺环转动,螺环上的螺纹与上舱段的螺纹相互拧紧,此时小齿轮驱动编码器实时采集回转支撑的转速,通过plc系统,经换算,控制电机减速器的转速,进而使拧紧组件随着螺环的旋转所产生的纵向位移,同步向上移动,即拧紧销机构随螺环同步向上移动,不会别断拧紧销,最终螺环拧紧到位,两舱段对接完成,各部件回位,利用机器人抓手取下产品。具有工作效率高、省时省力、拧紧力矩一致、稳定性好、具有自锁性的优点。
附图说明
11.图1是本实用新型具体实施方式的立体结构示意图。
12.图2是图1所示的拧紧组件的立体结构示意图。
13.图3是图2所示的剖视示意图。
14.图4是图3所示的拧紧销机构立体结构示意图。
15.图5是图3所示的a部放大示意图 。
16.图6是图1所示的防转组件的立体结构示意图。
17.图7是图3所示的拧紧销和螺环配合的立体结构示意图。
18.图8是图3所示的b-b剖视(拧紧销处于回缩状态)示意图。
19.图9是图3所示的b-b剖视(拧紧销处于伸出插入螺环的开口槽内的状态)示意图。
具体实施方式
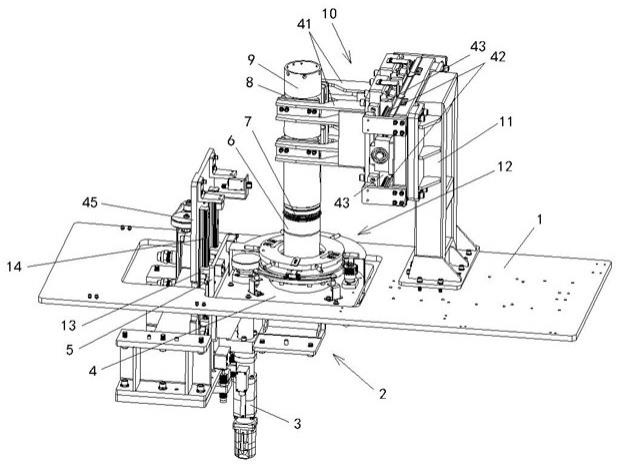
20.如图1所示:本实用新型的螺环自动拧紧装置,包括固定在机架上的基板1、抱夹组件10、拧紧组件12、防转组件2及随动组件。
21.如图1所示:抱夹组件10包括安装在立柱11上的水平设置的两根相互平行的上下分布的滑轨42,在每根滑轨42上均配有两组滑动块43,滑动块43连接夹臂41,夹臂41的端头内侧固定安装有对称的夹块8,左右两侧的滑动块43分别与双杆气缸两端的活塞杆相接,双杆气缸安装有立柱11上,立柱11下端
22.通过螺栓固定在基板1上。或者左右两侧的滑动块43分别与左旋和右旋螺母连接,左旋和右旋螺母与左旋和右旋丝杆连接,该丝杆与旋转驱动机构连接,只要能带动夹臂41相对往复运动,起到抱夹作用的机构均可。
23.如图1、2、3所示:拧紧组件12包括支撑板4,支撑板4上有中心孔,在中心孔周边处
通过螺栓固定有环形的支撑座30,支撑座30上面通过螺栓固定有回转支撑27,回转支撑27上面连接有连接盘22,连接盘22上面坐落有转盘19,转盘19与连接盘22之间设有径向限位的相互吻合的止口44。转盘19上有t型槽28,t型螺栓46穿过t型槽28与连接盘22螺纹连接,转盘19转动时t型螺栓46的端头可在t型槽28内滑动,对转盘19和连接盘22轴向限位。转盘19的侧边接有把手18。
24.如图3、4、5所示:在回转支22上面设有径向通道,在该径向通道内设有拧紧销机构,拧紧销机构包括拧紧销套24,在拧紧销套24内插装有拧紧销31并通过紧固螺钉(顶丝)32紧固,拧紧销套24上面有柱销33,柱销33插入转盘19上面的弧形槽40内。通过把手18转动转盘19时弧形槽40拨动柱销33使拧紧销机构在连接盘22上面的径向通道(定位滑槽)内移动,即在定位滑槽内产生径向位移。
25.如图1、2、3所示:在支撑板4的侧边固定有立板5,拧紧枪3通过安装座25安装在立板5上,与拧紧枪3相接的大齿轮17通过大齿轮轴承座15转动连接在支撑板4上。编码器23通过轴承支撑21安装在支撑板4上并接有小齿轮20。大齿轮17和小齿轮20均与回转支撑27的外圈相啮合。立板5上固定有连接块16,连接块16的内孔固定有丝母26。
26.如图1所示:随动组件包括安装在机架上的电机减速器和支板45,电机减速器的输出轴接与丝母26相配的丝杠,支板侧面固定有竖向设置的滑道14,与滑道14相配的滑块13固定在立板5的侧面,电机减速器可通过丝杠、丝母26、连接块16驱动支撑板4沿滑道14上下滑动。
27.如图1、6所示:防转组件2包括安装在机架上的定位盘35,在定位盘35上面设有与下舱段6底端面上的u形口38相配的定位块37和对上舱段6径向限位的径向挡块36。
28.如图1~9所示:本实用新型的螺环自动拧紧装置,柱状产品的下舱段6和上舱段9先由人工通过螺环7初步连接,由机器人抓手抓取产品放置到位,即下舱段6的下端头坐落在定位盘35上,径向挡块36挡在下舱段6下端头的周边,定位块37插入下舱段6下端的u型口38内,对产品进行径向限位并防止拧紧时受力转动。抱夹组件10中双杆气缸动作,使两组滑动块43同时向内移动,夹块8对机器人抓手抓取的上舱段9进行抱夹固定,使上舱段9和下舱段6竖向对正并处于同轴状态,然后电机减速器动作,带动丝杠转动,与丝杠配合的丝母26及连接块16上移,带动支撑板4及其上的组件一起上移,到达拧紧工位,即上升到拧紧销31与螺环7侧面的开口槽39高度一致,人工拨动把手18使转盘19相对于连接盘22旋转,转盘19上的弧形槽40拨动柱销33,使连接盘22上的径向通道内的拧紧销机构产生径向位移,拧紧销33伸出并插入到螺环7侧面的开口槽39内,拧紧枪3动作按设定力矩值进行旋转,通过大齿轮17带动回转支撑27旋转,带动连接盘22旋转,带动拧紧销机构旋转,螺环7转动,螺环7上的螺纹与上舱段9的螺纹相互拧紧,此时小齿轮20驱动编码器23实时采集回转支撑27的转速,通过plc系统,经换算,控制电机减速器的转速,进而使拧紧组件随着螺环的旋转所产生的纵向位移,同步向上移动,即拧紧销机构随螺环7同步向上移动,不会别断拧紧销33,最终螺环7拧紧到位,两舱段对接完成,各部件回位,利用机器人抓手取下产品。具有工作效率高、省时省力、拧紧力矩一致、稳定性好、具有自锁性的优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1