一种工业机器人用焊接平台的制作方法
1.本申请涉及工业机器人焊接夹紧的技术领域,尤其是涉及一种工业机器人用焊接平台。
背景技术:
2.焊接机器人是从事焊接(包括切割与喷涂)的工业机器人;工业机器人是一种多用途的、可重复编程的自动控制操作机。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。
3.但是,现有的部分工业机器人在对两个圆管/圆柱状的工件进行焊接时,不便对其进行夹紧、对齐,以便于其后续的焊接。因此,本领域技术人员提供了一种工业机器人用焊接平台,以解决上述背景技术中提出的问题。
技术实现要素:
4.为了解决上述背景技术中提出的问题,本申请提供一种工业机器人用焊接平台。
5.本申请提供的一种工业机器人用焊接平台采用如下的技术方案:
6.一种工业机器人用焊接平台,包括平台主体,所述平台主体上设有两个夹紧机构,且夹紧机构包括设在平台主体上表面的下弧形板,所述下弧形板的上表面中间位置安装有框架,且框架的上表面中间位置固定安装有电机,所述电机的输出端活动贯穿框架的内顶壁并连接有螺纹筒,且螺纹筒的内部螺纹连接有螺杆,所述螺杆的下表面固定连接有上弧形板。
7.通过采用上述技术方案,将两个待焊接的圆管/圆柱状的工件分别放在两个夹紧机构上的下弧形板上,接通两个电机的电源,电机的输出端即可带动螺纹筒转动,螺纹筒转动能够带动螺杆下移,从而能够使得螺杆带动上弧形板下移,直至上弧形板下移对圆管/圆柱状的工件进行夹紧,从而能够对两个待焊接的圆管/圆柱状的工件进行夹紧固定,随后,通过电动推杆的输出端推动位于后方的夹紧机构,从而使得夹紧机构能够带动圆管/圆柱状的工件进行移动,进而便于两个夹紧机构上的圆管/圆柱状的工件进行对齐贴合,便于工业机器人对其进行后续的焊接。
8.优选的,两个所述夹紧机构的规格均相同,且两个夹紧机构呈前后正对应设置在平台主体的上表面。
9.优选的,所述上弧形板的一侧安装有限位杆,且限位杆的一端滑动连接在限位槽的内部。
10.优选的,所述平台主体的后表面安装有固定架,固定架的前内壁安装有电动推杆,所述电动推杆的输出端与位于后方的夹紧机构上的下弧形板后表面固定连接。
11.优选的,所述平台主体的上表面靠近后表面的位置开设有滑槽,且滑槽内滑动连接有滑块,滑块与位于后方的夹紧机构上的下弧形板下表面固定连接。
12.综上所述,本申请包括以下有益技术效果:
13.通过两个夹紧机构、电动推杆、滑槽等部件的设置,能够将两个待焊接的圆管/圆柱状的工件分别进行夹紧,并通过电动推杆推动位于后方的夹紧机构,从而使得一个夹紧机构进行移动,进而便于两个夹紧机构上的圆管/圆柱状的工件进行对齐贴合,以便于后续工业机器人对其进行焊接。
附图说明
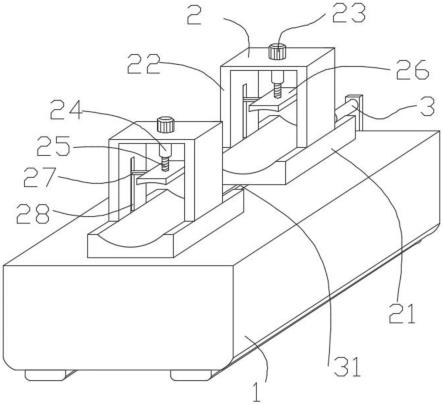
14.图1是本申请实施例中一种工业机器人用焊接平台的结构示意图;
15.图2是本申请实施例中一种工业机器人用焊接平台的剖面结构示意图;
16.图3是本申请实施例中图2中a处的放大结构示意图。
17.附图标记说明:1、平台主体;2、夹紧机构;21、下弧形板;22、框架;23、电机;24、螺纹筒;25、螺杆;26、上弧形板;27、限位杆;28、限位槽;3、电动推杆;31、滑槽。
具体实施方式
18.以下结合附图1-3对本申请作进一步详细说明。
19.本申请实施例公开一种工业机器人用焊接平台。参照图1-3,一种工业机器人用焊接平台,包括平台主体1,平台主体1上设有两个夹紧机构2,且夹紧机构2包括设在平台主体1上表面的下弧形板21,下弧形板21的上表面中间位置安装有框架22,且框架22的上表面中间位置固定安装有电机23,电机23的输出端活动贯穿框架22的内顶壁并连接有螺纹筒24,且螺纹筒24的内部螺纹连接有螺杆25,螺杆25的下表面固定连接有上弧形板26。
20.参照图1-3,两个夹紧机构2的规格均相同,且两个夹紧机构2呈前后正对应设置在平台主体1的上表面,能够便于对两个夹紧机构2上的圆管/圆柱状的工件进行对齐贴合,以便于后续的工业机器人对其进行焊接;上弧形板26的一侧安装有限位杆27,且限位杆27的一端滑动连接在限位槽28的内部,限位杆27和限位槽28能够对上弧形板26进行限位,并通过上弧形板26对螺杆25进行限位,使得螺杆25和上弧形板26只能作垂直方向的升降运动,而不能发生旋转。
21.参照图1-2,平台主体1的后表面安装有固定架,固定架的前内壁安装有电动推杆3,电动推杆3的输出端与位于后方的夹紧机构2上的下弧形板21后表面固定连接,能够便于电动推杆3推动位于后方的夹紧机构2进行移动,进而便于两个夹紧机构2上的圆管/圆柱状的工件进行对齐,便于工业机器人对其进行焊接;平台主体1的上表面靠近后表面的位置开设有滑槽31,且滑槽31内滑动连接有滑块,滑块与位于后方的夹紧机构2上的下弧形板21下表面固定连接,与滑块固定连接的下弧形板21的下表面以及平台主体1的上表面均为光滑面,从而能够便于与滑块连接的夹紧机构2进行移动。
22.本申请实施例一种工业机器人用焊接平台的实施原理为:电动推杆3、两个电机23均通过导线与外部电源电性连接,同一夹紧机构2上的上弧形板26与下弧形板21上下正对应,使用时,通过将两个待焊接的圆管/圆柱状的工件分别放在两个夹紧机构2上的下弧形板21上,随后,接通两个电机23的电源,电机23的输出端即可带动螺纹筒24转动,螺纹筒24转动能够带动螺杆25下移,从而能够使得螺杆25带动上弧形板26下移,直至上弧形板26下移对圆管/圆柱状的工件进行夹紧,从而能够对两个待焊接的圆管/圆柱状的工件进行夹紧固定,随后,通过电动推杆3的输出端推动位于后方的夹紧机构2,从而使得夹紧机构2能够
带动圆管/圆柱状的工件进行移动,进而便于两个夹紧机构2上的圆管/圆柱状的工件进行对齐贴合,便于工业机器人对其进行焊接,其中,限位杆27和限位槽28能够对上弧形板26进行限位,并通过上弧形板26对螺杆25进行限位,使得螺杆25和上弧形板26只能作垂直方向的升降运动,而不能发生旋转。
23.以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
技术特征:
1.一种工业机器人用焊接平台,包括平台主体(1),其特征在于:所述平台主体(1)上设有两个夹紧机构(2),且夹紧机构(2)包括设在平台主体(1)上表面的下弧形板(21),所述下弧形板(21)的上表面中间位置安装有框架(22),且框架(22)的上表面中间位置固定安装有电机(23),所述电机(23)的输出端活动贯穿框架(22)的内顶壁并连接有螺纹筒(24),且螺纹筒(24)的内部螺纹连接有螺杆(25),所述螺杆(25)的下表面固定连接有上弧形板(26)。2.根据权利要求1所述的一种工业机器人用焊接平台,其特征在于:两个所述夹紧机构(2)的规格均相同,且两个夹紧机构(2)呈前后正对应设置在平台主体(1)的上表面。3.根据权利要求1所述的一种工业机器人用焊接平台,其特征在于:所述上弧形板(26)的一侧安装有限位杆(27),且限位杆(27)的一端滑动连接在限位槽(28)的内部。4.根据权利要求1所述的一种工业机器人用焊接平台,其特征在于:所述平台主体(1)的后表面安装有固定架,固定架的前内壁安装有电动推杆(3),所述电动推杆(3)的输出端与位于后方的夹紧机构(2)上的下弧形板(21)后表面固定连接。5.根据权利要求1所述的一种工业机器人用焊接平台,其特征在于:所述平台主体(1)的上表面靠近后表面的位置开设有滑槽(31),且滑槽(31)内滑动连接有滑块,滑块与位于后方的夹紧机构(2)上的下弧形板(21)下表面固定连接。
技术总结
本申请涉及一种工业机器人用焊接平台,包括平台主体,所述平台主体上设有两个夹紧机构,且夹紧机构包括设在平台主体上表面的下弧形板,所述下弧形板的上表面中间位置安装有框架,且框架的上表面中间位置固定安装有电机,所述电机的输出端活动贯穿框架的内顶壁并连接有螺纹筒,且螺纹筒的内部螺纹连接有螺杆,所述螺杆的下表面固定连接有上弧形板;通过两个夹紧机构、电动推杆、滑槽等部件的设置,能够将两个待焊接的圆管/圆柱状的工件分别进行夹紧,并通过电动推杆推动位于后方的夹紧机构,从而使得一个夹紧机构进行移动,进而便于两个夹紧机构上的圆管/圆柱状的工件进行对齐贴合,以便于后续工业机器人对其进行焊接。以便于后续工业机器人对其进行焊接。以便于后续工业机器人对其进行焊接。
技术研发人员:陈进业 胡明春
受保护的技术使用者:安徽盛徽工业自动化科技有限公司
技术研发日:2022.10.25
技术公布日:2023/2/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1