一种用于碗篮网片焊接后自动脱模移载设备的制作方法
【】本技术涉及碗篮加工设备,尤其涉及一种用于碗篮网片焊接后自动脱模移载设备。
背景技术
0、
背景技术:
1、由于碗篮网片焊接的点位较多,在对碗篮网片进行焊接时,经常需要将碗篮网片放置于龙门焊接机床的治具上进行。碗篮网片焊接完成后,一般由操作人员戴好手套将焊接好的碗篮网片从龙门焊接机床上取下,刚焊接好碗篮网片会产生大量热气及灰尘,容易对操作人员的身体健康造成影响,下料过程有可能将操作人员除手以外的其他部位烫伤,同时通过人工下料浪费时间,降低了加工效率,还增加了操作人员的劳动强度。
2、例如:中国专利授权公告号:cn202283629,授权公告日2012年6月27日,公开了一种龙门焊机装置,包括机架,所述的机架内设置有调节装置,机架的两个端部的下方分别设置行走装置,所述的机架的两个端部的上方分别设置有升降机构;所述的机架由调节装置控制行走装置和升降机构实现升降和移动。其不足之处是当碗篮网片焊接好后,需要操作人员手动将碗篮网片取下,该过程费时费力,增加了劳动强度,降低了工作效率,还有可能使操作人员受伤。
3、因此,本实用新型正是为了解决上述技术问题而提出的。
技术实现思路
0、
技术实现要素:
1、本实用新型目的是克服了现有技术的不足,提供一种用于碗篮网片焊接后自动脱模移载设备,本实用新型在使用时能够节省一名操作人员,降低劳动强度,提高工作效率,避免操作人员受伤。
2、本实用新型是通过以下技术方案实现的:
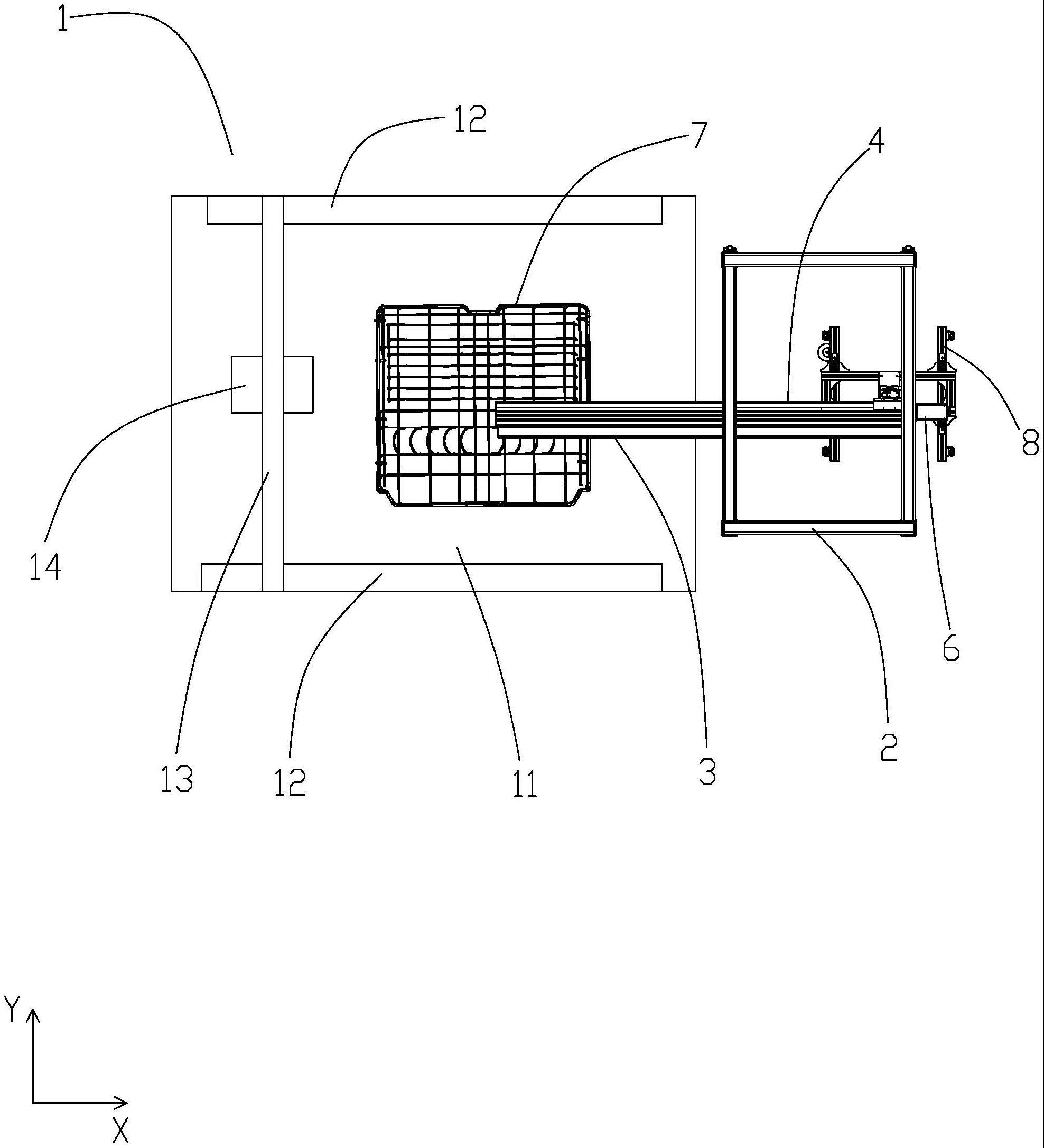
3、一种用于碗篮网片焊接后自动脱模移载设备,包括设于龙门焊接机床1输出端一侧的机架2,所述机架2上固定连接有横梁3,所述横梁3一端延伸至龙门焊接机床1上方,所述横梁3上沿x轴设有第一导轨4,所述第一导轨4上套设有能沿x轴运动的滑动座5,所述横梁3上还设有能使滑动座5在第一导轨4上沿x轴运动的第一驱动部6,所述滑动座5上设有用于夹持龙门焊接机床1上焊接好的碗篮网片7的夹持机构8,所述滑动座5上还设有用于驱动夹持机构8沿z轴运动的第二驱动部9,所述夹持机构8包括连接于第二驱动部9上的能沿z轴运动的移动架81,所述移动架81上设有用于夹持碗篮网片7且间距可调节的夹持组件82。
4、所述夹持组件82包括连接于移动架81上的夹爪气缸821,所述夹爪气缸821一端连接有能夹持碗篮网片7的夹爪822。
5、所述移动架81上设有能供夹爪气缸821滑动并能与移动架81连接的卡槽811。
6、所述第一驱动部6包括设于横梁3上的用于驱动滑动座5在第一导轨3上沿x轴运动的电机61,所述电机61通过驱动皮带或丝杠使滑动座5在第一导轨3上运动。
7、所述第二驱动部9包括与滑动座5连接的气缸91,所述气缸91靠近移动架81一端设有能与移动架81连接的连接板93。
8、所述龙门焊接机床1包括用于定位支撑碗篮网片7的支撑台11,所述支撑台11两侧沿x轴方向设有第二导轨12,两个所述第二导轨12之间沿y轴方向设有能跨设于二者上的且能沿x轴运动的竖梁13,所述竖梁13上设有能够沿z轴运动并对碗篮网片7进行焊接的焊接机构14。
9、所述机架2下方设有轮子21。
10、与现有技术相比,本实用新型有如下优点:
11、1、本实用新型在使用时,通过第一驱动部驱动滑动座在第一导轨上运动,从而带动第二驱动部及夹持机构在第一导轨上向靠近龙门焊接机床的一侧运动,待夹持机构移动到碗篮网片上方的合适位置,驱动第二驱动部使夹持机构沿z轴向下运动靠近碗篮网片,通过调节夹持组件夹紧碗篮网片后,驱动第二驱动部使夹持机构带动碗篮网片沿z轴向上运动,使碗篮网片脱离龙门焊接机床,再通过第一驱动部驱动滑动座在第一导轨上运动,从而带动第二驱动部及夹持机构在第一导轨上向远离龙门焊接机床的一侧运动,待运动到合适位置,驱动第二驱动部使夹持机构带动碗篮网片沿z轴向下运动,松开夹持组件后便可将碗篮网片放置到合适的位置,该过程操作简单,便于用户操作,通过调节夹持机构的位置与龙门焊接机床配合,能够自动脱模和移载碗篮网片,节省了一名操作人员,降低劳动强度,提高工作效率,还能够避免操作人员受伤。
12、2、操作人员可以通过驱动夹爪气缸从而夹持碗篮网片,但是对于不同规格的碗篮网片,夹持组件无法精确夹持准确位置,此时操作人员可以通过调节夹持组件在卡槽上的位置,从而改变两个夹持组件之间的间距,通过调节夹持组件使得夹持机构能抓取不同规格的碗篮网片,使本实用新型的适用范围更广,同时还能保证碗篮网片在夹持过程中的稳定性,从而减少安全隐患。
技术特征:
1.一种用于碗篮网片焊接后自动脱模移载设备,其特征在于:包括设于龙门焊接机床(1)输出端一侧的机架(2),所述机架(2)上固定连接有横梁(3),所述横梁(3)一端延伸至龙门焊接机床(1)上方,所述横梁(3)上沿x轴设有第一导轨(4),所述第一导轨(4)上套设有能沿x轴运动的滑动座(5),所述横梁(3)上还设有能使滑动座(5)在第一导轨(4)上沿x轴运动的第一驱动部(6),所述滑动座(5)上设有用于夹持龙门焊接机床(1)上焊接好的碗篮网片(7)的夹持机构(8),所述滑动座(5)上还设有用于驱动夹持机构(8)沿z轴运动的第二驱动部(9),所述夹持机构(8)包括连接于第二驱动部(9)上的能沿z轴运动的移动架(81),所述移动架(81)上设有用于夹持碗篮网片(7)且间距可调节的夹持组件(82)。
2.根据权利要求1所述的用于碗篮网片焊接后自动脱模移载设备,其特征在于:所述夹持组件(82)包括连接于移动架(81)上的夹爪气缸(821),所述夹爪气缸(821)一端连接有能夹持碗篮网片(7)的夹爪(822)。
3.根据权利要求1所述的用于碗篮网片焊接后自动脱模移载设备,其特征在于:所述移动架(81)上设有能供夹爪气缸(821)滑动并能与移动架(81)连接的卡槽(811)。
4.根据权利要求1所述的用于碗篮网片焊接后自动脱模移载设备,其特征在于:所述第一驱动部(6)包括设于横梁(3)上的用于驱动滑动座(5)在第一导轨(4)上沿x轴运动的电机(61),所述电机(61)通过驱动皮带或丝杠使滑动座(5)在第一导轨(4)上运动。
5.根据权利要求1所述的用于碗篮网片焊接后自动脱模移载设备,其特征在于:所述第二驱动部(9)包括与滑动座(5)连接的气缸(91),所述气缸(91)靠近移动架(81)一端设有能与移动架(81)连接的连接板(93)。
6.根据权利要求1所述的用于碗篮网片焊接后自动脱模移载设备,其特征在于:所述龙门焊接机床(1)包括用于定位支撑碗篮网片(7)的支撑台(11),所述支撑台(11)两侧沿x轴方向设有第二导轨(12),两个所述第二导轨(12)之间沿y轴方向设有能跨设于二者上的且能沿x轴运动的竖梁(13),所述竖梁(13)上设有能够沿z轴运动并对碗篮网片(7)进行焊接的焊接机构(14)。
7.根据权利要求1所述的用于碗篮网片焊接后自动脱模移载设备,其特征在于:所述机架(2)下方设有轮子(21)。
技术总结
本技术公开了一种用于碗篮网片焊接后自动脱模移载设备,包括设于龙门焊接机床输出端一侧的机架,所述机架上固定连接有横梁,所述横梁一端延伸至龙门焊接机床上方,所述横梁上沿X轴设有第一导轨,所述第一导轨上套设有能沿X轴运动的滑动座,所述横梁上还设有能使滑动座在第一导轨上沿X轴运动的第一驱动部,所述滑动座上设有用于夹持龙门焊接机床上焊接好的碗篮网片的夹持机构,所述滑动座上还设有用于驱动夹持机构沿Z轴运动的第二驱动部,本技术在对焊接好的碗篮网片进行脱模移载时,能够节省一名操作人员,降低劳动强度,提高工作效率,避免操作人员受伤。
技术研发人员:郭栋,冯晶晶,叶林华
受保护的技术使用者:中山市立达金属制品有限公司
技术研发日:20221115
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!