机壳卷圆机的制作方法
1.本实用新型涉及电机壳体成型领域的改进发明,尤其涉及一种机壳卷圆机的改进发明。
背景技术:
2.机壳卷圆机是将板材进行卷圆成型的设备,包括有依次衔接的板材进料机构、板材初卷机构和板材终卷机构,然而现有的板材进料机构包括有料仓和将板材从料仓内抓取的吸附式机械手,由于板材为平板状,板材之间存在贴合粘连情况,当吸附式机械手取料时,有几率会一次性取出多块板材,严重影响加工生产的安全性和高效性。
技术实现要素:
3.本实用新型所要解决的技术问题是克服现有技术的不足,提供一种结构合理、安全可靠的机壳卷圆机。
4.为了解决上述技术问题,本实用新型是采用如下技术方案来实现的:该种机壳卷圆机,包括有机座,其特征在于:所述机座上设有依次衔接的进料机构、卷圆机构和模压机构,且卷圆机构与模压机构之间配设有第一传递机械手;所述进料机构包括有进料滑道、推料块和料仓,所述进料滑道的出口衔接至卷圆机构一侧,推料块可往复移动设置于进料滑道内,料仓位于进料滑道一侧,所述料仓包括有左右侧板、前挡板、托料板和出料台,所述托料板可升降动作设置于左右侧板之间,且托料板上方设有限位感应部件,所述出料台后端与前挡板上端相连,托料板与出料台之间配设有可前后移动的第二传递机械手,第二传递机械手包括有吸附部件,吸附部件至出料台的距离略大于物料厚度;所述出料台与进料通道之间配设有可前后移动和升降动作的第三传递机械手。
5.所述卷圆机构为三轴卷圆机构,三轴卷圆机构包括有卷圆配合的固定卷圆轴和两根并排的主动卷圆轴,主动卷圆轴可转动设置,固定卷圆轴可升降动作位于主动卷圆轴上方,相应的固定卷圆轴两端设有提升臂,且位于固定卷圆轴出口端的提升臂可摆动脱离固定卷圆轴。
6.所述卷圆机构为双轴卷圆机构,双轴卷圆机构包括有卷圆配合的固定卷圆轴和包胶轮,该包胶轮可转动设置,固定卷圆轴可升降动作位于包胶轮上方,相应的固定卷圆轴两端设有提升臂,且位于卷圆轴出口端的提升臂可摆动脱离固定卷圆轴。
7.所述进料滑道间距可调节设置,相应的进料滑道包括有底板和分布于底板上的左右护板,左右护板可相对移动设置于底板上,并配设有螺杆驱动机构和锁紧机构。
8.所述卷圆机构另一侧设有控制卷圆机构进行工作的触碰开关,该触碰开关位于进料滑道的出口前方与之物料前端触碰配合,且触碰开关可移动远离物料。
9.所述模压机构包括有模压配合的上模与下模及位于二者之间的成型轴,该成型轴对应的上模与下模上设有成型腔,成型轴上还套设有可轴向移动的脱料圈。
10.所述成型轴可转动设置。
11.所述模压机构的出料端下方衔接有输送通道。
12.所述第一传递机械手包括有气动夹爪,气动夹爪可前后移动衔接于卷圆机构与模压机构之间进行初卷物料的传递。
13.所述固定卷圆轴的升降动作以及主动卷圆轴的转动分别由伺服电机驱动。
14.本实用新型的有益效果是改进后的机壳卷圆机,通过设置升降动作的托料板、出料台和第二传递机械手,且第二传递机械手的吸附部件至出料台的距离略大于物料厚度,当板材由托料板上升传送至第二传递机械手,而第二传递机械手前后移动时,只允许吸附一块板材,贴合粘连的底部板材将会由出料台后端或前挡板上端阻挡脱离,以此有效避免抓取多块板材,有效保证加工生产的安全性和高效性。
附图说明
15.下面结合附图对本实用新型的具体实施方式作进一步详细说明。
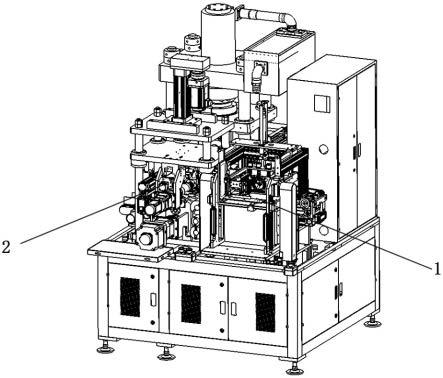
16.图1为本实用新型的结构示意图。
17.图2为本实用新型的结构侧视图。
18.图3为本实用新型进料机构的结构视图一。
19.图4为本实用新型进料机构的结构视图二。
20.图5为本实用新型三轴卷圆机构的结构示意图。
21.图6为本实用新型双轴卷圆机构的结构示意图。
22.图7为本实用新型模压机构的结构示意图。
具体实施方式
23.附图表示了本实用新型的结构,下面再结合附图进一步说明其有关细节。本实施例中,参见附图1-4,该机壳卷圆机,包括有机座,所述机座上设有依次衔接的进料机构1、卷圆机构2和模压机构3,且卷圆机构2与模压机构3之间配设有第一传递机械手4;所述进料机构1包括有进料滑道11、推料块12和料仓13,所述进料滑道11的出口衔接至卷圆机构2一侧,推料块12可往复移动设置于进料滑道11内,料仓13位于进料滑道11一侧,所述料仓13包括有左右侧板131、前挡板132、托料板133和出料台134,前挡板132连接于左右侧板131前端,托料板133可升降动作设置于左右侧板131之间,且托料板133上方设有限位感应部件14,优选限位感应部件14为弹性触碰开关,所述出料台134后端与前挡板132上端相连,二者构成90度夹角形成倒l型结构,托料板133与出料台134之间配设有可前后移动的第二传递机械手5,第二传递机械手5可前后移动设置于水平导轨上,第二传递机械手5包括有吸附部件,吸附部件至出料台134的距离略大于物料(板材)厚度;所述出料台134与进料通道之间配设有可前后移动和升降动作的第三传递机械手6,优选第三传递机械手6包括有吸附部件,吸附部件设置于升降导轨上,升降导轨可前后移动设置于水平导轨上。
24.本实用新型的工作原理,托料板133上移,带动堆叠的板材上移,最上层的板材触碰到限位感应部件14和第二传递机械手5的吸附部件,托料板133停止上移,吸附部件吸取最上层的板材,之后向前移动进入出料台134,并将板材释放至特定位置,该过程中,若存在贴合粘连的底部板材,将会受到出料台134后端或前挡板132上端的限位,发生脱离;接着第三传递机械手6将出料台134上的板材传递至进料滑道11,并由推料块12推送至卷圆机构2
进行板材初卷,最后第一传递机械手4抓取初卷板材移送至模压机构3进行模压,完成终卷成型。
25.作为进一步改进的具体实施方式,参见附图5,所述卷圆机构2采用两种卷圆方式,第一种卷圆方式为,所述卷圆机构2为三轴卷圆机构,三轴卷圆机构包括有卷圆配合的固定卷圆轴21和两根并排的主动卷圆轴22,主动卷圆轴22可转动设置,固定卷圆轴21可升降动作位于主动卷圆轴22上方,相应的固定卷圆轴21两端设有提升臂23,且位于固定卷圆轴21出口端的提升臂23可摆动脱离固定卷圆轴21;工作时,进料机构1将板材传送至卷圆机构2的两根并排的主动卷圆轴22上方,接着固定卷圆轴21下降压住板材前端,使板材局部弯曲形变,接着主动卷圆轴22逆时针转动,带动板材前移逐渐卷曲绕设于固定卷圆轴21上,之后固定卷圆轴21出口端的提升臂23上摆脱离固定卷圆轴21供第一传递机械手4抓取初卷板材。该种采用三轴形式可适应更多厚度的板材。
26.第二种卷圆方式为,参见附图6,所述卷圆机构2为双轴卷圆机构,双轴卷圆机构包括有卷圆配合的固定卷圆轴21和包胶轮24,该包胶轮24可转动设置,固定卷圆轴21可升降动作位于包胶轮上方,相应的固定卷圆轴21两端设有提升臂23,且位于卷圆轴出口端的提升臂23可摆动脱离固定卷圆轴21。工作时,进料机构1将板材传送至卷圆机构2的包胶轮上方,接着固定卷圆轴21下降压住板材前端,使板材局部弯曲形变,接着包胶轮24逆时针转动,带动板材前移逐渐卷曲绕设于固定卷圆轴21上,之后固定卷圆轴21出口端的提升臂23上摆脱离固定卷圆轴21供第一传递机械手4抓取初卷板材。该种采用包胶轮24形式可以减少板材磨损。
27.作为进一步改进的具体实施方式,参见附图3-4,所述进料滑道11间距可调节设置,相应的进料滑道11包括有底板112和分布于底板112上的左右护板111,左右护板111可相对移动设置于底板112上,并配设有螺杆驱动机构113和锁紧机构114,螺杆驱动机构113包括有手轮、螺杆和底座,通过螺杆同时驱动左右护板111起始端,进行相对移动,调节完成后,通过锁紧机构将左右护板111固定于进料滑道11,锁紧机构114优选为配设有手柄的锁紧螺栓。
28.作为进一步改进的具体实施方式,参见附图5-6,所述卷圆机构2另一侧设有控制卷圆机构2进行工作的触碰开关8,该触碰开关8位于进料滑道11的出口前方与之物料前端触碰配合,且触碰开关8可移动远离物料,可采用弹性设置实现移动。
29.作为进一步改进的具体实施方式,参见附图7,所述模压机构3包括有模压配合的上模31与下模32及位于二者之间的成型轴33,该成型轴33对应的上模31与下模32上设有成型腔,成型轴33上还套设有可轴向移动的脱料圈34,脱料圈34可由气缸驱动进行轴向移动,且不脱料时,脱料圈34位于成型轴33后端,不处于上模31与下模32之间。其中,模压配合可为上模31与下模32升降动作,或者上模31与成型轴33升降动作。
30.作为进一步改进的具体实施方式,所述成型轴33可转动设置,可带动物料旋转角度进行多次模压,提高卷圆度。
31.作为进一步改进的具体实施方式,参见附图2,所述模压机构3的出料端下方衔接有输送通道7。
32.作为进一步改进的具体实施方式,参见附图2,所述第一传递机械手4包括有气动夹爪,气动夹爪可前后移动衔接于卷圆机构2与模压机构3之间进行初卷物料的传递,优选
气动夹爪设置于滑轴上由气缸或电机驱动。
33.作为进一步改进的具体实施方式,所述固定卷圆轴的升降动作以及主动卷圆轴的转动分别由伺服电机驱动,提高驱动的控制精度。
34.综上所述,以上仅为本实用新型的较佳实施例而已,并非用于限定本实用新型的保护范围。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1