一种叶根铁法兰螺栓拆卸机器人的制作方法
本技术涉及属于风力叶片拆卸,具体涉及一种叶根铁法兰螺栓拆卸机器人。
背景技术:
1、能源是人类社会发展和经济增长的原动力,目前在可再生能源中,除水电以外,风电是最具有商业的开发条件。近年来,我国风电行业也得到快速的发展,我国已经成为全球风力发电规模最大、增长最快的国家。风力发电叶片需要通过叶根螺栓连接到主机上,连接方法主要有t型螺栓和预埋螺栓两种技术。在风电行业初期,叶片功率较小,叶根载荷小,采用t型螺栓方式工艺简单,质量容易控制。随着时代的发展,现有的预埋螺栓一般都是灌注固定在叶根中的,风力叶片注塑完成后,叶根铁法兰内部的螺栓需要拆卸,现阶段人工手动拆卸劳动强度大且高空作业危险系数高,提高生产效率还低。
技术实现思路
1、为解决现有技术存在的不足,本实用新型提供了一种叶根铁法兰螺栓拆卸机器人。
2、为实现上述目的,本实用新型提供了以下技术方案:
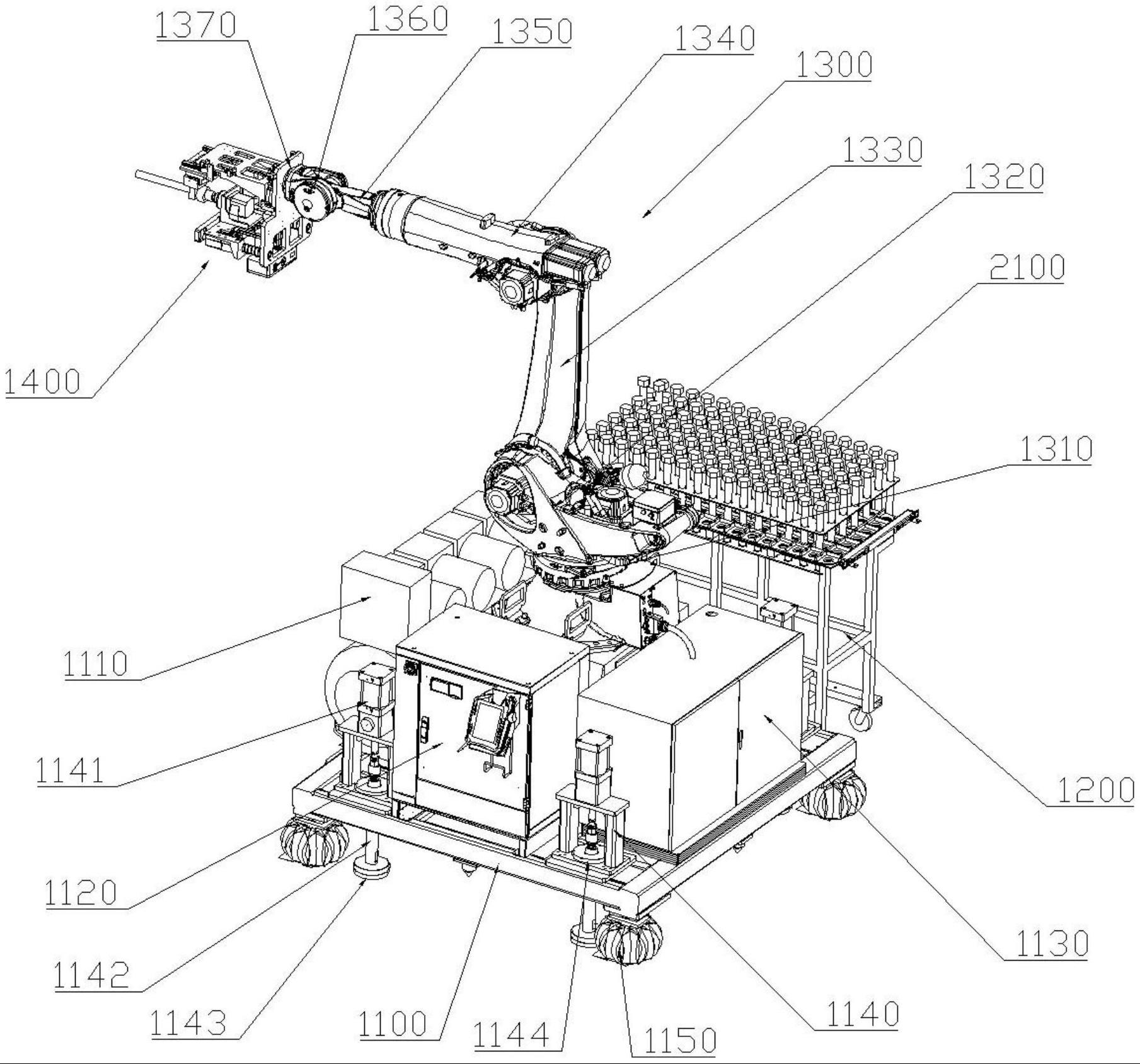
3、一种叶根铁法兰螺栓拆卸机器人,包括移动装置、控制装置、执行装置和存放装置,其中:
4、所述移动装置包括安装支架和牵引车,所述牵引车安装在所述安装支架的右端,所述安装支架的下端设有若干第一脚轮,所述安装支架上设有若干支架支撑组件,所述支架支撑组件包括第一支撑架、第一气缸、第一套筒和伸缩支撑腿,所述第一支撑架固定在所述安装支架的上端,所述第一气缸安装在所述第一支撑架的上端,所述第一套筒设置在所述第一支撑架的下端,所述伸缩支撑腿设置在所述第一套筒内,所述伸缩支撑腿的上端与所述第一气缸相连接,所述伸缩支撑腿的下端穿过所述第一套筒设有支撑座;
5、所述存放装置包括螺栓存放架,所述螺栓存放架设置在所述安装支架的前侧,所述螺栓存放架的下端设有若干第二脚轮,所述螺栓存放架的上端设有第一支撑板和第二支撑板,所述第一支撑板对应设置于所述第二支撑板的上方,所述第一支撑板上设有若干第一通孔,所述第二支撑板的上端设有若干第一支撑槽,所述第一支撑槽与所述第一通孔一一对应;
6、所述执行装置包括机械手和拆卸夹具,所述机械手的左端转动连接有输出法兰,所述拆卸夹具安装在所述输出法兰的左端,所述拆卸夹具包括扳手滑动组件、底板组件和夹爪导轨组件,所述扳手滑动组件和夹爪导轨组件均安装在所述底板组件的左端,所述扳手滑动组件用于拆卸叶根铁法兰螺栓,所述夹爪导轨组件用于夹持叶根铁法兰螺栓;
7、所述控制装置包括视觉传感模块、控制柜、空压机和电气柜,所述控制柜、空压机和电气柜均安装在所述安装支架的上端,所述视觉传感模块安装在所述拆卸夹具上。
8、进一步地,所述扳手滑动组件包括第一安装板、第二安装板、第一限位板、第二气缸和扳手,所述第一安装板的两端均设有第二套筒,所述底板组件包括安装底板,所述安装底板的两端均设有第一支撑杆,所述第一支撑杆与所述第二套筒一一对应,所述第一限位板的两端分别与所述第一支撑杆固定连接,所述第二气缸安装在所述第一安装板的下端,所述第二气缸的活塞端与所述第一限位板固定连接,所述第二安装板安装在所述第一安装板的上端,所述扳手安装在所述第二安装板的上端。
9、进一步地,所述扳手滑动组件包括缓冲弹簧、第一限位块、第一安装件和第二安装件,所述缓冲弹簧设置于所述安装底板和所述第一安装板之间、并套设在所述第一支撑杆上,所述第一安装件安装在所述安装底板上,所述第二安装件安装在所述第一安装件的下端,所述第一限位块安装在所述第二安装件的下端,所述第一安装板的两端设有第一限位孔,所述第一限位孔对应于所述第二套筒的上端,所述第一限位块对应设置于所述第一限位孔内。
10、进一步地,所述夹爪导轨组件包括第三安装板、第四安装板、第三气缸、第四气缸和第五气缸,所述第三安装板的右端设有第一滑块,所述安装底板的左端设有第一导轨,所述第一滑块与所述第一导轨一一对应,所述第三气缸安装在所述安装底板上,所述第三气缸的活塞端与所述第三安装板固定连接,所述第三安装板的左端设有第二滑块,所述第四安装板的上端设有第二导轨,所述第二滑块与所述第二导轨一一对应,所述第四气缸安装在所述第三安装板的下端,所述第四气缸的活塞端与所述第四安装板固定连接,所述第五气缸安装在所述第四安装板的下端,所述第五气缸的下端设有相对设置的所述第一气动夹爪和第二气动夹爪,所述第一气动夹爪的下端设有第一卡槽,所述第二气动夹爪的下端设有第二卡槽,所述第一卡槽与所述第二卡槽相对应。
11、进一步地,所述夹爪导轨组件包括第一液压缓冲器、第二液压缓冲器、第三安装件、第四安装件和第二限位块,所述第三安装件安装在所述第三安装板的左端,所述第一液压缓冲器安装在所述第三安装件的上端,所述第四安装件安装在所述第三安装件的右侧,所述第二液压缓冲器安装在所述第四安装件的上端,所述第二限位块安装在所述第四安装板的后端,所述第一液压缓冲器和第二液压缓冲器均与所述第二限位块相对应。
12、进一步地,所述底板组件包括第三液压缓冲器、第四液压缓冲器、第五安装件和第六安装件,所述第五安装件安装在所述安装底板的右端、并对应于所述第一导轨的上端,所述第三液压缓冲器安装在所述第五安装件上,所述第三液压缓冲器与所述第一滑块的上端相对应,所述第六安装件安装在所述安装底板的左端、并对应于所述第一导轨的下端,所述第四液压缓冲器安装在所述第五安装件上,所述第四液压缓冲器与所述第一滑块的下端相对应。
13、本实用新型公开的一种叶根铁法兰螺栓拆卸机器人及拆卸方法,与现有技术相比,其有益效果在于:
14、1、本申请利用机械手带动拆卸夹具实现自动拆卸叶根铁法兰螺栓,并且机械手为六轴机器人的设计,可以保证拆卸夹具具有更大的工作区域,能够将水平状态拆卸的叶根铁法兰螺栓垂直方向放入螺栓存放架中,可极大的降低劳动强度,提高生产效率,从而实现安全生产;
15、2、本申请通过视觉传感模块对一组三个叶根铁法兰螺栓的位置进行拍照,并对一组三个螺栓存放架的第一通孔的位置进行拍照,可以自动捕捉并确认待拆卸的叶根铁法兰螺栓的位置以及叶根铁法兰螺栓的存放位置,即视觉传感模块可以对叶根铁法兰螺栓进行快速识别,可帮助机械手快速做出路径计算,从而减少设备计算时间,提高叶根铁法兰螺栓的拆卸效率;
16、3、本申请通过底板组件将扳手滑动组件和夹爪导轨组件安装在机械手上,扳手滑动组件通过第二气缸推动第一安装板移动至适合的位置,使得扳手对准待拆卸的叶根铁法兰螺栓,启动扳手即可将叶根铁法兰螺栓旋松,夹爪导轨组件通过第三气缸可以驱动第三安装板上下移动,并通过第四气缸驱动第四安装板前后移动,将第一气动夹爪和第二气动夹爪移至叶根铁法兰螺栓的位置,第五气缸气动则可以控制第一气动夹爪和第二气动夹爪将叶根铁法兰螺栓夹取,进而将叶根铁法兰螺栓放入螺栓存放架中。
技术特征:
1.一种叶根铁法兰螺栓(2100)拆卸机器人,用于拆卸安装在风力叶片(2000)上的叶根铁法兰螺栓(2100),其特征在于,包括移动装置、控制装置、执行装置和存放装置,其中:
2.根据权利要求1所述的叶根铁法兰螺栓(2100)拆卸机器人,其特征在于,所述扳手滑动组件包括第一安装板(1410)、第二安装板(1420)、第一限位板(1453)、第二气缸(1472)和扳手(1421),所述第一安装板(1410)的两端均设有第二套筒(1411),所述底板组件包括安装底板(1450),所述安装底板(1450)的两端均设有第一支撑杆(1451),所述第一支撑杆(1451)与所述第二套筒(1411)一一对应,所述第一限位板(1453)的两端分别与所述第一支撑杆(1451)固定连接,所述第二气缸(1472)安装在所述第一安装板(1410)的下端,所述第二气缸(1472)的活塞端与所述第一限位板(1453)固定连接,所述第二安装板(1420)安装在所述第一安装板(1410)的上端,所述扳手(1421)安装在所述第二安装板(1420)的上端。
3.根据权利要求2所述的叶根铁法兰螺栓(2100)拆卸机器人,其特征在于,所述扳手滑动组件包括缓冲弹簧(1452)、第一限位块(1483)、第一安装件(1481)和第二安装件(1482),所述缓冲弹簧(1452)设置于所述安装底板(1450)和所述第一安装板(1410)之间、并套设在所述第一支撑杆(1451)上,所述第一安装件(1481)安装在所述安装底板(1450)上,所述第二安装件(1482)安装在所述第一安装件(1481)的下端,所述第一限位块(1483)安装在所述第二安装件(1482)的下端,所述第一安装板(1410)的两端设有第一限位孔(1412),所述第一限位孔(1412)对应于所述第二套筒(1411)的上端,所述第一限位块(1483)对应设置于所述第一限位孔(1412)内。
4.根据权利要求3所述的叶根铁法兰螺栓(2100)拆卸机器人,其特征在于,所述夹爪导轨组件包括第三安装板(1430)、第四安装板(1440)、第三气缸(1471)、第四气缸(1473)和第五气缸(1460),所述第三安装板(1430)的右端设有第一滑块(1432),所述安装底板(1450)的左端设有第一导轨(1454),所述第一滑块(1432)与所述第一导轨(1454)一一对应,所述第三气缸(1471)安装在所述安装底板(1450)上,所述第三气缸(1471)的活塞端与所述第三安装板(1430)固定连接,所述第三安装板(1430)的左端设有第二滑块(1431),所述第四安装板(1440)的上端设有第二导轨(1441),所述第二滑块(1431)与所述第二导轨(1441)一一对应,所述第四气缸(1473)安装在所述第三安装板(1430)的下端,所述第四气缸(1473)的活塞端与所述第四安装板(1440)固定连接,所述第五气缸(1460)安装在所述第四安装板(1440)的下端,所述第五气缸(1460)的下端设有相对设置的第一气动夹爪(1461)和第二气动夹爪(1462),所述第一气动夹爪(1461)的下端设有第一卡槽,所述第二气动夹爪(1462)的下端设有第二卡槽,所述第一卡槽与所述第二卡槽相对应。
5.根据权利要求4所述的叶根铁法兰螺栓(2100)拆卸机器人,其特征在于,所述夹爪导轨组件包括第一液压缓冲器(1489)、第二液压缓冲器(1488)、第三安装件(1435)、第四安装件(1434)和第二限位块(1433),所述第三安装件(1435)安装在所述第三安装板(1430)的左端,所述第一液压缓冲器(1489)安装在所述第三安装件(1435)的上端,所述第四安装件(1434)安装在所述第三安装件(1435)的右侧,所述第二液压缓冲器(1488)安装在所述第四安装件(1434)的上端,所述第二限位块(1433)安装在所述第四安装板(1440)的后端,所述第一液压缓冲器(1489)和第二液压缓冲器(1488)均与所述第二限位块(1433)相对应。
6.根据权利要求4所述的叶根铁法兰螺栓(2100)拆卸机器人,其特征在于,所述底板组件包括第三液压缓冲器(1487)、第四液压缓冲器(1485)、第五安装件(1486)和第六安装件(1484),所述第五安装件(1486)安装在所述安装底板(1450)的右端、并对应于所述第一导轨(1454)的上端,所述第三液压缓冲器(1487)安装在所述第五安装件(1486)上,所述第三液压缓冲器(1487)与所述第一滑块(1432)的上端相对应,所述第六安装件(1484)安装在所述安装底板(1450)的左端、并对应于所述第一导轨(1454)的下端,所述第四液压缓冲器(1485)安装在所述第五安装件(1486)上,所述第四液压缓冲器(1485)与所述第一滑块(1432)的下端相对应。
技术总结
本技术公开了一种叶根铁法兰螺栓拆卸机器人,包括移动装置、控制装置、执行装置和存放装置,所述移动装置包括安装支架和牵引车,所述存放装置包括螺栓存放架,所述螺栓存放架设置在所述安装支架的前侧,所述执行装置包括机械手和拆卸夹具,所述拆卸夹具包括扳手滑动组件、底板组件和夹爪导轨组件,所述扳手滑动组件和夹爪导轨组件均安装在所述底板组件的左端,所述扳手滑动组件用于拆卸叶根铁法兰螺栓,所述夹爪导轨组件用于夹持叶根铁法兰螺栓。本技术提供的一种叶根铁法兰螺栓拆卸机器人,本申请利用机械手带动拆卸夹具实现自动拆卸叶根铁法兰螺栓,可极大的降低劳动强度,提高生产效率,从而实现安全生产。
技术研发人员:杨继森,朱兴达
受保护的技术使用者:辛帕智能科技(平湖)有限公司
技术研发日:20221216
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!