一种大扭矩螺栓自动化定扭装置的制作方法
本技术涉及一种大扭矩螺栓自动化定扭装置,属于履带起重机中转台和回转支承连接螺栓定扭的。
背景技术:
1、履带起重机:是一种高层建筑施工用的自行式起重机。是一种利用履带行走的动臂旋转起重机,主要分为臂架和主机两大部分,其中臂架根据工况由主臂、副臂、塔臂、超起等组成,主机由转台、车架和履带梁三大块组成。
2、转台:是履带起重机重要的工作心脏,布置有操纵室、主臂、桅杆、超起桅杆、卷扬系统、动力系统、液压系统、电气系统、回转系统、配重、变幅滑轮组等部件。
3、回转支承:是实现履带起重机动臂旋转的关键部件,转台和车架通过它连接,实现相对旋转。回转支承共有两圈通孔,内圈孔用于与转台连接,外圈孔与车架连接。
4、履带式起重机中转台和回转支承装配一般通过螺栓连接,由于转台是履带起重机重要承载结构件,主要承受来自起重臂、桅杆、超起桅杆、起升机构、变幅机构、平衡重等上车所有载荷,受力情况复杂,并通过回转支承传力至车架,对转台与回转支承连接的螺栓预紧力要求比较高,根据详细计算并转化为扭矩,一般采用m24以上螺栓,扭矩在1000nm以上。
5、现有技术中,转台与回转支承之间的大扭矩螺栓定扭时,一般通过人工手持电枪或推动夹持小车夹持电枪(此时转台与回转支承放置在马腿上,螺栓已预装)蹲在马腿下拧紧,由于大扭矩电枪较重,人工工作环境差,手持劳动量巨大,效率较低,且质量受人工工作状态影响。人工通过夹持小车夹持电枪移动拧紧,人工工作环境差,考虑安装空间和便捷性原因小车结构强度有限,由于长时间大扭矩拧紧,会导致支撑小车变形,影响拧紧质量。且夹持小车易损坏,不能满足长期螺栓连接定扭要求。
技术实现思路
1、本实用新型所要解决的技术问题是克服现有技术的缺陷,提供一种大扭矩螺栓自动化定扭装置,可替代人工和小车为转台和回转支撑之间的大扭矩螺栓进行定扭,提高定扭的质量,降低劳动强度,提高劳动效率。
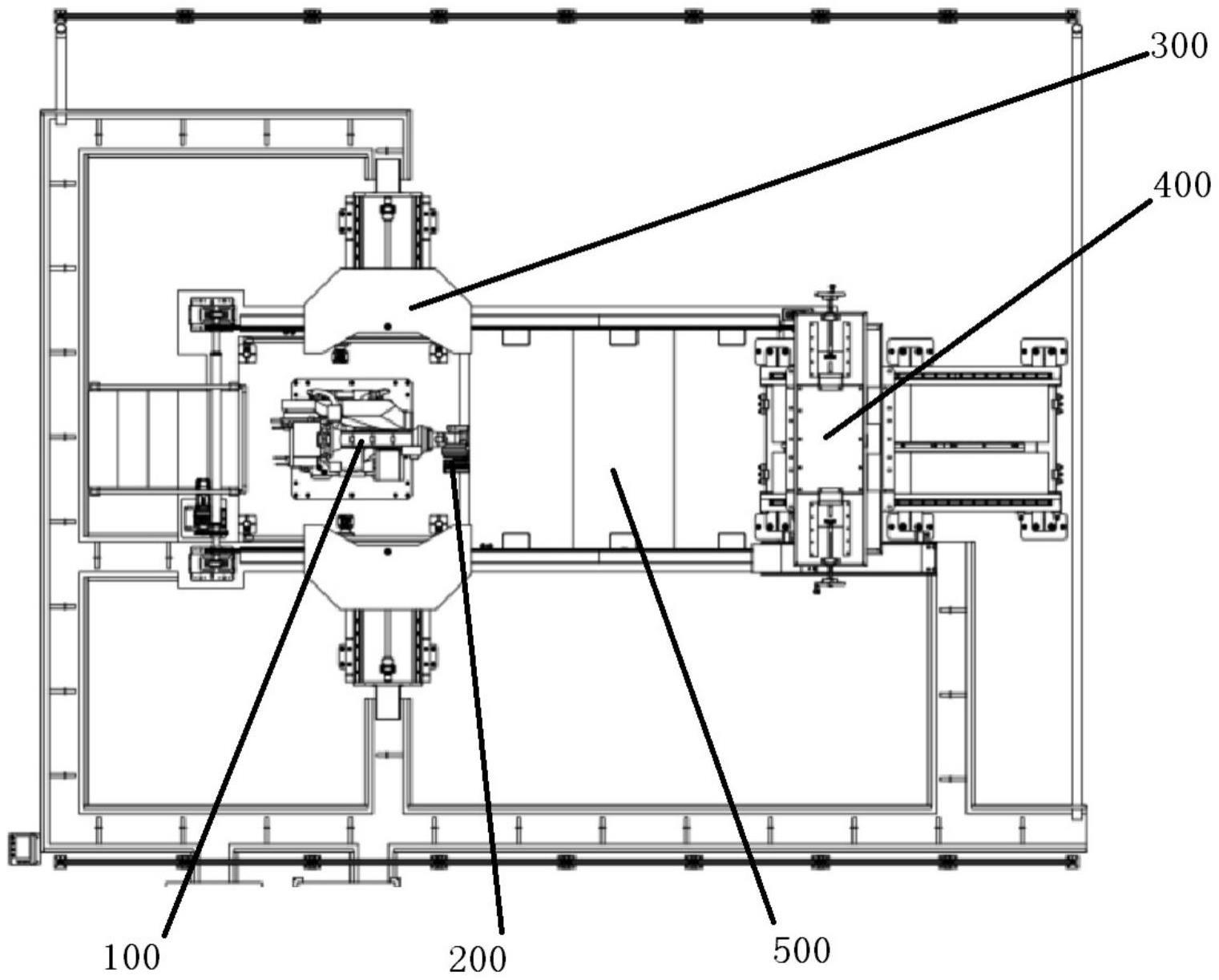
2、为达到上述目的,第一方面,本实用新型提供一种大扭矩螺栓自动化定扭装置,包括机器人安装组件和支撑定位部件,所述支撑定位部件用于固定转台和回转支承,所述机器人安装组件用于为螺栓定扭;
3、所述机器人安装组件包括机械臂和拧紧组件,所述拧紧组件设置于机械臂的自由端;
4、所述拧紧组件包括连接夹持工装,以及设置于连接夹持工装的视觉相机、激光传感器、气缸、连杆和反力臂电枪,所述视觉相机和激光传感器设置于反力臂电枪输出轴的一侧;
5、所述反力臂电枪的输出轴转动连接连接夹持工装,所述连杆连接反力臂电枪的输出轴和气缸的缸杆。
6、进一步地,所述支承定位部件位于机器人安装组件上部,所述支撑定位部件包括伺服支撑滑台和伺服辅助支撑,所述伺服支撑滑台对称设置两座,各所述伺服支撑滑台包括滑动连接的固定底板和滑动底座,所述固定底板和滑动底座之间设置伺服电机和丝杆螺母机构;
7、所述伺服电机设置于固定底板,所述丝杆螺母机构包括丝杆和螺母,所述丝杆连接伺服电机,所述螺母设置于滑动底座,所述螺母和丝杆螺纹连接。
8、进一步地,所述滑动底座上设置有支撑平台,所述支撑平台上设置有半圆形的支撑面,两所述半圆形的支撑面的开口相对设置。
9、进一步地,所述支撑平台上设置有销轴,用于插入回转支承的外圈孔,固定回转支承。
10、进一步地,所述伺服辅助支撑包括挡板机构、高度调节机构和距离调节机构;
11、所述挡板机构包括升降台和两相对设置的挡板,两上所述挡板滑动连接升降台,所述升降台中设置丝杆螺母机构,所述丝杆螺母机构中的丝杆包括两段旋向相反的螺纹段,各所述螺纹段中均螺纹连接有螺母,各所述螺母分别连接挡板,所述丝杆传动连接有伺服电机。
12、进一步地,所述高度调节机构包括螺杆升降机,所述螺杆升降机的输出轴连接升降台,所述螺杆升降机的动力输入端连接有伺服电机。
13、进一步地,所述距离调节机构包括行走座和底座,所述行走座和底座滑动连接,所述底座和行走座之间设置齿轮齿条机构,所述齿轮齿条机构中的齿条设置于底座,齿轮设置于行走座,所述齿轮传动连接有伺服电机。
14、进一步地,所述伺服支撑滑台和伺服辅助支撑之间设置伸缩踏板,所述伸缩踏板将机器人安装组件和支撑定位部件隔离;
15、所述伸缩踏板包括滑动连接的上平台和下平台,以及链条齿轮传动机构,所述链条齿轮传动机构中的链条连接上平台,以带动上平台滑动。
16、进一步地,所述上平台和下平台的两侧边设置导向轨道,所述导向轨道为工字形槽,所述链条齿轮传动机构中的链条设置在导向轨道中,所述上平台和下平台的侧边设置于导向轨道。
17、进一步地,所述下平台底面设置有第一挡板,所述第一挡板配设有第二挡板,所述第二挡板固定设置,用于防止下平台缩回。
18、本实用新型所达到的有益效果:
19、本实用新型提供一种大扭矩螺栓自动化定扭装置,本实用新型设置支撑定位部件支撑并定位回转支承和转台,然后对螺栓进行预装后,通过视觉相机和激光传感器对待定扭的螺栓进行定位,通过机械臂调整反力臂电枪的位置,将套筒套入,通过气缸和连杆机构旋转反力臂电枪,使得反力臂快速抵靠相邻的螺栓,依靠反力进行螺栓定扭。本实用新型可替代人工和小车为转台和回转支撑之间的大扭矩螺栓进行定扭,提高定扭的质量,降低劳动强度,提高劳动效率。
技术特征:
1.一种大扭矩螺栓自动化定扭装置,其特征在于:
2.根据权利要求1所述的一种大扭矩螺栓自动化定扭装置,其特征在于:
3.根据权利要求2所述的一种大扭矩螺栓自动化定扭装置,其特征在于:
4.根据权利要求3所述的一种大扭矩螺栓自动化定扭装置,其特征在于:
5.根据权利要求2所述的一种大扭矩螺栓自动化定扭装置,其特征在于:
6.根据权利要求5所述的一种大扭矩螺栓自动化定扭装置,其特征在于:
7.根据权利要求6所述的一种大扭矩螺栓自动化定扭装置,其特征是:
8.根据权利要求2所述的一种大扭矩螺栓自动化定扭装置,其特征在于:
9.根据权利要求8所述的一种大扭矩螺栓自动化定扭装置,其特征在于:
10.根据权利要求9所述的一种大扭矩螺栓自动化定扭装置,其特征在于:
技术总结
本技术公开了一种大扭矩螺栓自动化定扭装置,包括机器人安装组件和支撑定位部件,支撑定位部件用于固定转台和回转支承,机器人安装组件用于为螺栓定扭;所述机器人安装组件包括机械臂和拧紧组件,拧紧组件设置于机械臂的自由端;拧紧组件包括连接夹持工装,以及设置于连接夹持工装的视觉相机、激光传感器、气缸、连杆和反力臂电枪,视觉相机和激光传感器设置于反力臂电枪输出轴的一侧;反力臂电枪的输出轴转动连接连接夹持工装,所述连杆连接反力臂电枪的输出轴和气缸的缸杆。本技术可替代人工和小车为转台和回转支撑之间的大扭矩螺栓进行定扭,提高定扭的质量,降低劳动强度,提高劳动效率。
技术研发人员:任奇,张鹏,柳胜
受保护的技术使用者:徐工集团工程机械股份有限公司建设机械分公司
技术研发日:20221227
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!