带有机械抓手的回转体PDC工件自动上下料机构的制作方法
本技术涉及激光加工,具体的,涉及带有机械抓手的回转体pdc工件自动上下料机构。
背景技术:
1、现有技术中,在对pdc工件进行加工时,若采用机械手进行自动化上下料,常用的方式是通过在加工平台旁设立机械手操作平台,通过调整机械手的运行轨迹以满足自动化上下料的功能,但由于机械手与加工平台为两个独立的设备,需要操作人员花费大量的时间调整机械手与加工平台的配合,以确保满足加工精度,若被加工件的规格发生变化时,同样需要花费大量的时间进行调整,并且为加工平台再单独配备一个机械手操作平台成本相对较高,进而导致生产的时间成本以及设备成本大幅提升。
技术实现思路
1、本实用新型提出带有机械抓手的回转体pdc工件自动上下料机构,解决了相关技术中的加工平台采用机械手实现自动化上下料时,需要配备独立机械手操作平台,进而导致生产的时间成本以及设备成本大幅提升的问题。
2、本实用新型的技术方案如下:
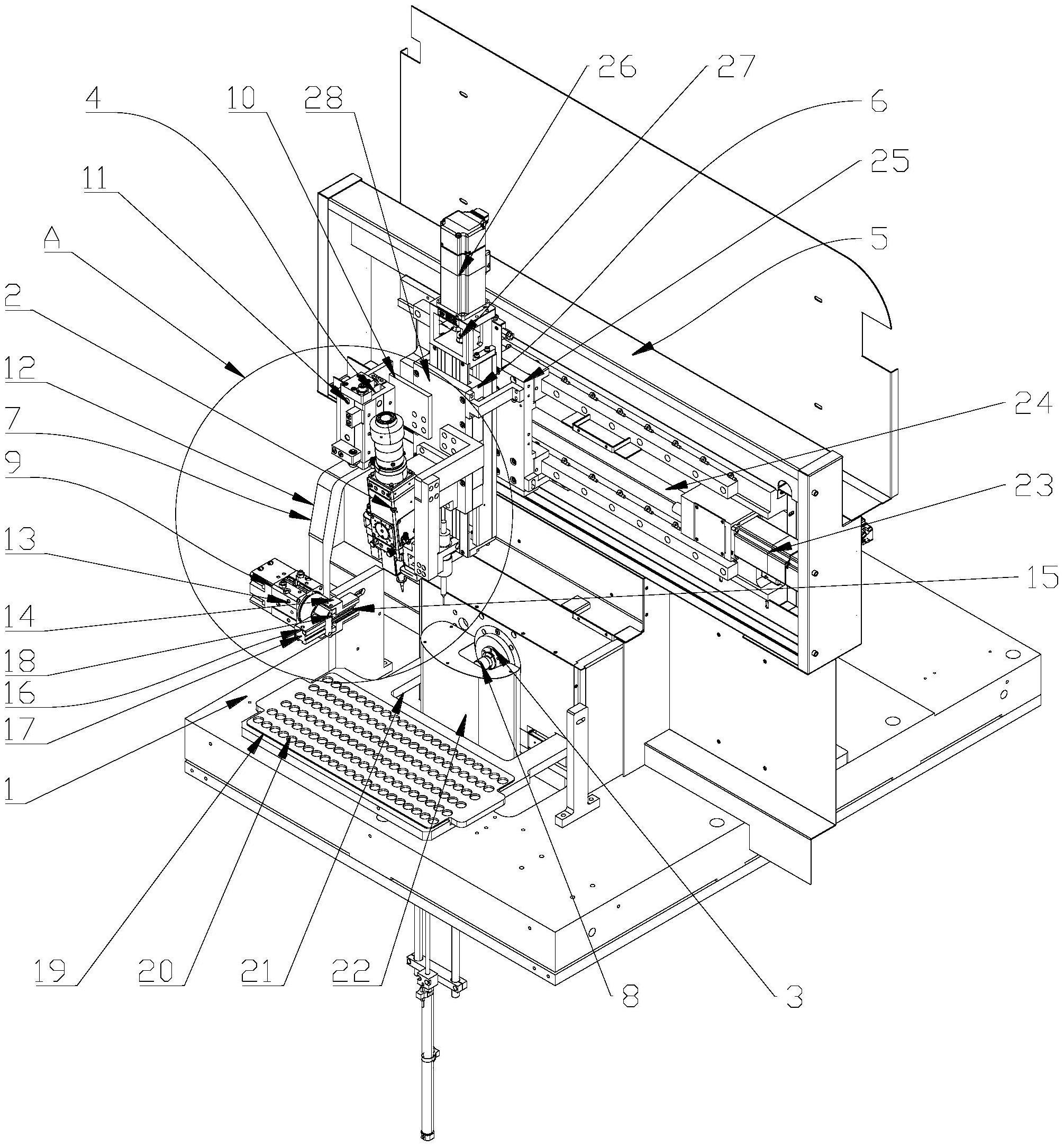
3、带有机械抓手的回转体pdc工件自动上下料机构,包括机架、加工装置和夹紧装置,所述夹紧装置沿第一方向滑动设置在所述机架上,还包括机械手抓取件,所述机械手抓取件包括:
4、第一滑动组件,沿第二方向滑动设置在所述机架上;
5、第二滑动组件,沿第三方向滑动设置在所述第一滑动组件上,所述第一方向、所述第二方向和所述第三方向相互垂直,所述加工装置设置在所述第二滑动组件上;
6、抓取组件,设置在所述第二滑动组件上,具有用于抓取被加工件的抓取夹头。
7、作为进一步的技术方案,所述抓取组件包括:
8、安装座,设置在所述第二滑动组件上;
9、第一线性驱动件,设置在所述安装座上;
10、支撑臂,滑动设置在所述安装座上,且设置在所述第一线性驱动件的驱动端上,所述抓取夹头设置在所述支撑臂上。
11、作为进一步的技术方案,所述抓取夹头包括:
12、转动驱动件,设置在所述支撑臂上;
13、夹取件,设置在所述转动驱动件的驱动端上,具有夹取间隙;
14、推送件,设置在所述转动驱动件的驱动端上,用于沿所述夹取间隙推送所述被加工件。
15、作为进一步的技术方案,所述推送件包括:
16、第二线性驱动件,设置在所述夹取件上;
17、推杆,设置在所述第二线性驱动件的驱动端上,用于沿所述夹取间隙向所述夹紧装置推动。
18、作为进一步的技术方案,还包括:
19、上下料盘,设置在所述夹紧装置上,随所述夹紧装置滑动,所述上下料盘具有若干个存料凹槽,所述存料凹槽用于存放所述被加工件,所述上下料盘与所述夹紧装置之间具有避让通槽;
20、吸尘罩,升降设置在所述机架上,升降后,所述避让通槽和所述吸尘罩配合,所述吸尘罩用于罩设在所述被加工件上。
21、作为进一步的技术方案,所述第一滑动组件包括:
22、第一驱动电机,设置在所述机架上;
23、第一螺杆,沿所述第二方向设置在所述第一驱动电机上,所述第一驱动电机用于驱动所述第一螺杆转动;
24、第一滑座,滑动设置在所述机架上,与所述第一螺杆螺纹配合,所述第一螺杆转动后,所述第一滑座沿所述第二方向滑动,所述第二滑动组件设置在所述第一滑座上。
25、作为进一步的技术方案,所述第二滑动组件包括:
26、第二驱动电机,设置在所述第一滑座上;
27、第二螺杆,沿所述第三方向设置在所述第二驱动电机上,所述第二驱动电机用于驱动所述第二螺杆转动;
28、第二滑座,滑动设置在所述第一滑座上,与所述第二螺杆螺纹配合,所述第二螺杆转动后,所述第二滑座沿所述第三方向滑动,所述抓取组件和所述加工装置均设置在所述第二滑座上,所述抓取夹头和所述加工装置的加工头配合设置。
29、本实用新型的工作原理及有益效果为:
30、本实用新型中,为解决相关技术中的加工平台采用机械手实现自动化上下料时,需要配备独立机械手操作平台,进而导致生产的时间成本以及设备成本大幅提升的问题,设计了一种带有机械抓手的回转体pdc工件自动上下料机构,具体为,在机架上设置滑动设置的夹紧装置、第一滑动组件和第二滑动组件,三者沿相互垂直的方向滑动,在第二滑动组件上设置加工装置和抓取组件,使二者能够共用同一套基准,以确保加工精度,使用过程中,首先通过移动第一滑动组件,带动第二滑动组件第二方向移动,并向指定的存料区域移动,之后通过第二滑动组件滑动,带动抓取组件和加工装置同时沿第三方向移动,使抓取组件将被加工件夹取,第一滑动组件再次带动第二滑动组件第二方向移动,同时第二滑动组件沿第三方向滑动,使抓取组件、加工装置和夹紧装置在同一条线上,最后夹紧装置沿第一方向滑动,将被加工件夹紧,夹紧后滑动至加工装置的加工头下方进行加工,当加工完成后,可以通过人工将加工后的被加工件取出,也可以通过逆向重复上述过程,通过机械手抓取组件将加工后的被加工件放置在原来位置,最后重复该过程完成加工生产,通过本方案,首先使抓取组件设置和加工装置均设置在同一套移动装置上,即二者共用同一套移动基准,以确保抓取被加工件的精度,同时能够减小使用空间和设备成本,由于不需要增加新的机械手,并且不需要操作人员根据实际的需要对加工装置和机械手进行重复的精度设置,保证了设备调配的效率。
技术特征:
1.带有机械抓手的回转体pdc工件自动上下料机构,包括机架(1)、加工装置(2)和夹紧装置(3),其特征在于,所述夹紧装置(3)沿第一方向滑动设置在所述机架(1)上,还包括机械手抓取件(4),所述机械手抓取件(4)包括:
2.根据权利要求1所述的带有机械抓手的回转体pdc工件自动上下料机构,其特征在于,所述抓取组件(7)包括:
3.根据权利要求2所述的带有机械抓手的回转体pdc工件自动上下料机构,其特征在于,所述抓取夹头(9)包括:
4.根据权利要求3所述的带有机械抓手的回转体pdc工件自动上下料机构,其特征在于,所述推送件(16)包括:
5.根据权利要求1所述的带有机械抓手的回转体pdc工件自动上下料机构,其特征在于,还包括:
6.根据权利要求1所述的带有机械抓手的回转体pdc工件自动上下料机构,其特征在于,所述第一滑动组件(5)包括:
7.根据权利要求6所述的带有机械抓手的回转体pdc工件自动上下料机构,其特征在于,所述第二滑动组件(6)包括:
技术总结
本技术涉及激光加工技术领域,提出了带有机械抓手的回转体PDC工件自动上下料机构,包括机架、加工装置和夹紧装置,夹紧装置沿第一方向滑动设置在机架上,还包括机械手抓取件,机械手抓取件包括:第一滑动组件沿第二方向滑动设置在机架上;第二滑动组件沿第三方向滑动设置在第一滑动组件上,第一方向、第二方向和第三方向相互垂直,加工装置设置在第二滑动组件上,具有用于抓取被加工件的抓取夹头。通过上述技术方案,解决了相关技术中的加工平台采用机械手实现自动化上下料时,需要配备独立机械手操作平台,进而导致生产的时间成本以及设备成本大幅提升的问题。
技术研发人员:段夫平,程鸿江,张元彪,张艺麟
受保护的技术使用者:北京凝华科技有限公司
技术研发日:20221230
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!