一种焊接机械臂滑移机构的制作方法
本申请涉及焊接机械臂,尤其是涉及一种焊接机械臂滑移机构。
背景技术:
1、在焊接技术领域,机器焊接的方式主要通过焊接机械臂的方法实现,通过将焊枪安装在焊接机械臂上,通过对焊接机械臂的关节进行控制,从而使焊接机械臂的焊枪在设定的坐标范围内进行移动,进而实现高精度焊接。这种机械设备的控制大多采用可编程的控制程序,在人工输入参数后进行作业,焊接质量可靠、精度高、环境适应性好,可以大幅度提高焊接效率和质量,也便于实现重复的高精度的批量化作业。
2、现有的焊接机械臂大多数采用传动带连接驱动,驱动电机控制传动带转动,传动带动机械臂沿直线导轨滑移,该种滑移机构难以避免机械臂受到惯性作用发生位置偏移,导致行进位置不准确,影响焊接精度。
技术实现思路
1、为了改善现有滑移机构容易导致机械臂行进位置不准确的问题,本申请的目的是提供一种焊接机械臂滑移机构。
2、本申请提供的一种焊接机械臂滑移机构采用如下的技术方案:
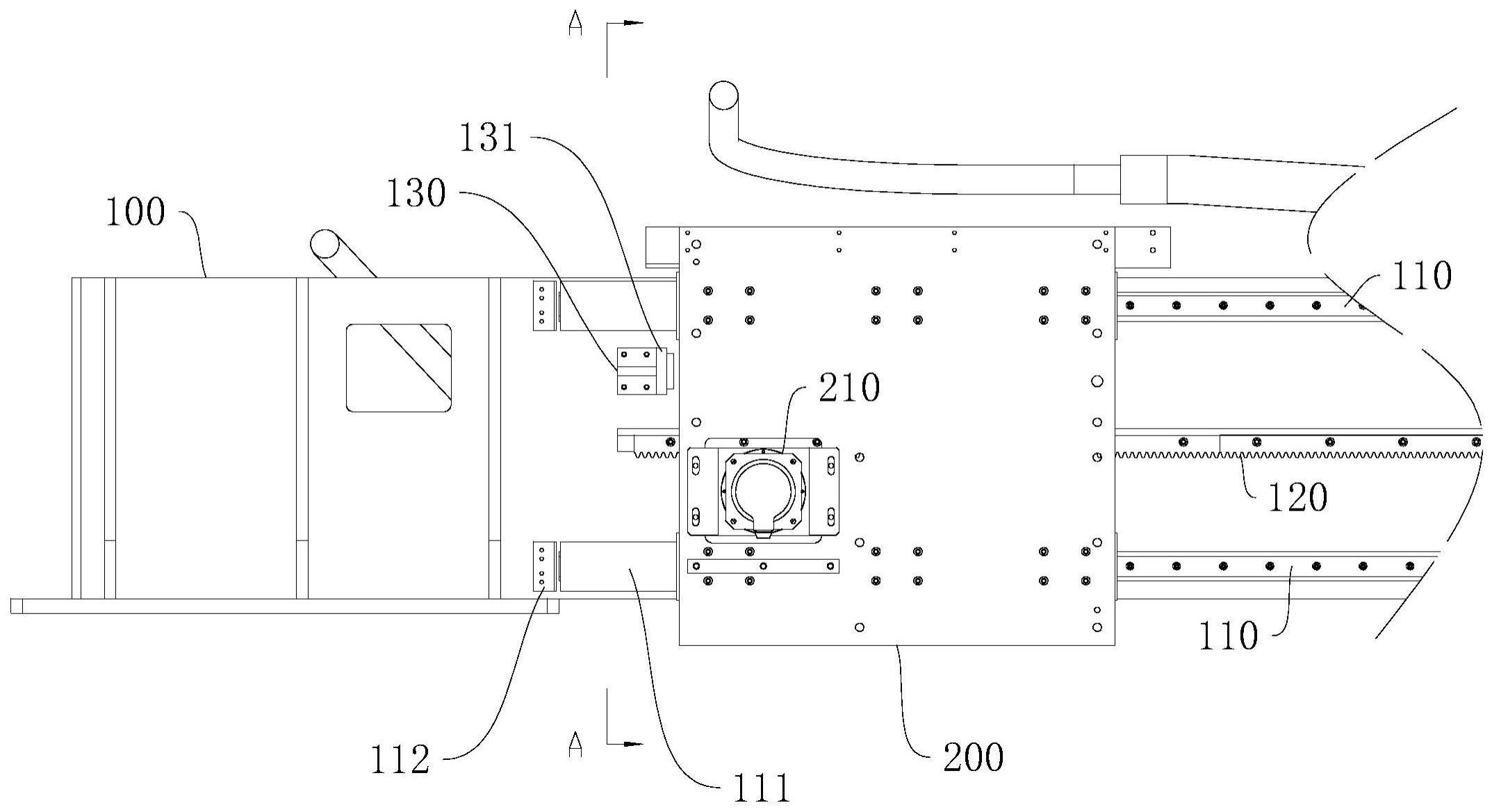
3、一种焊接机械臂滑移机构,包含行走横梁、安装有机械臂的滑动板、驱动件,所述行走横梁上设置有两条相互平行的直线导轨,所述滑动板滑移连接在所述直线导轨上,所述驱动件安装在所述滑动板上,所述驱动件的驱动端朝向所述滑动板的底部,且驱动端上连接有齿轮,所述行走横梁位于两个所述直线导轨之间设置有齿条,所述齿轮与所述齿条相啮合。
4、通过采用上述技术方案,驱动件转动时通过齿轮与齿条的啮合,使得滑动板能够沿两条平行的直线导轨直线滑移,从而带动滑动板上的机械臂实现位移焊接的过程,利用齿轮与齿条的驱动方式,结构稳定,且控制精度高,当驱动件在停止时,能够及时的控制滑动板停留在直线导轨的相应位置上,不会因滑动板在滑动时受到惯性作用而发生发生位置偏移,定位置精确,从而保证机械臂的焊接精度。
5、可选的,所述直线导轨位于所述滑动板的两侧设置有防护罩,且所述防护罩的外侧设置有罩贴板。
6、通过采用上述技术方案,利用防护罩,使得滑动板在直线导轨上滑移时,保障过程安全;同时利用罩贴板,能够对防护罩进行有效的限位,防止脱出。
7、可选的,所述行走横梁上还设置有安装座,所述安装座上设置缓冲垫,所述缓冲垫设置有两个,分别位于所述齿条的左右两侧,且所述缓冲垫的安装高度与所述滑动板的安装高度相同。
8、通过采用上述技术方案,利用缓冲垫,使得滑动板滑动到直线导轨的左右两侧端部时,不会脱离直线导轨,同时避免受到较大的冲击,形成一定的缓冲效果,有效的保护滑动板的行程安全。
9、可选的,所述行走横梁背离所述滑动板的另一面设置有若干支撑杆,所述支撑杆上设置有承接板,所述承接板上开设有拖链槽,所述拖链槽内设置有拖链。
10、通过采用上述技术方案,支撑杆用于整体支撑承接板,承接板上开设拖链槽,便于实现对拖链的限位,利用设置的拖链,使得机械臂或驱动件相应的线束能够安装于拖链的内部,使得滑动板在移动时,线束不会因牵引造成干涉或缠绕,出现线束断线的安全隐患。
11、可选的,所述滑动板沿所述行走横梁的顶部延伸,且朝向所述拖链的一侧设置有连接架,所述拖链的一端固设于所述连接架上。
12、通过采用上述技术方案,滑动板带动连接架同步进行水平滑移,拖链的一端连接在连接架上,能够同步带动拖链进行移动,更好的保护线束的连接安全。
13、可选的,所述滑动板的顶部设置有防尘板,所述防尘板靠近所述滑动板与所述直线导轨的连接处。
14、通过采用上述技术方案,利用防尘板,使得滑动板沿直线导轨滑移时,不会造成局部受到异物侵蚀的情况,防止滑动板与直线导轨干涉卡死。
15、可选的,所述滑动板朝向于所述行走横梁的一侧设置有抵接件,所述抵接件的端部设置有限位块,所述行走横梁上还设置有销座,所述销座上设置有垫块,所述垫块上安装有传感器,所述传感器用于监测所述滑动板停止时控制所述抵接件带动所述限位块抵接于所述行走横梁上。
16、通过采用上述技术方案,当传感器监测到滑动板停留在直线导轨的相应位置时,为了提高滑动板的定位精度,此时程序控制抵接件朝向行走横梁的端面伸缩,限位块充分抵接在行走横梁上,此时滑动板在驱动件与抵接件的双重定位下,稳固的限位于直线导轨的相应位置上,保障滑动板上的机械臂实现精确焊接。
17、可选的,所述滑动板与所述直线导轨之间设置有滑块,所述滑块与所述滑动板固定连接,所述直线导轨内开设有滑槽,所述滑槽内设置有连接块,所述滑块上开设有与所述滑槽连通的开槽,所述连接块穿过所述开槽与所述滑块连接。
18、通过采用上述技术方案,滑块固定在滑动板上,滑块与直线导轨之间除基础的燕尾槽定位连接之外,还通过连接块滑动连接在滑槽内,使得滑动板不易产生与直线导轨脱离的现象,滑动结构更加稳定。
19、可选的,所述滑槽为圆形结构,对应的所述连接块位于所述滑槽内的截面为圆形。
20、通过采用上述技术方案,利用圆形结构的滑槽适配连接块,过程滑移顺畅,且定位效果好,且方便过程维护。
21、综上所述,本申请包括以下至少一种有益效果:
22、1.驱动件转动时通过齿轮与齿条的啮合,使得滑动板能够沿两条平行的直线导轨直线滑移,从而带动滑动板上的机械臂实现位移焊接的过程,利用齿轮与齿条的驱动方式,结构稳定,且控制精度高,当驱动件在停止时,能够及时的控制滑动板停留在直线导轨的相应位置上,不会因滑动板在滑动时受到惯性作用而发生发生位置偏移,定位置精确,从而保证机械臂的焊接精度,整体实用性强,具有较大的市场推广价值;
23、2.利用缓冲垫,使得滑动板滑动到直线导轨的左右两侧端部时,不会脱离直线导轨,同时避免受到较大的冲击,形成一定的缓冲效果,有效的保护滑动板的行程安全;
24、3.当传感器监测到滑动板停留在直线导轨的相应位置时,为了提高滑动板的定位精度,此时程序控制抵接件朝向行走横梁的端面伸缩,限位块充分抵接在行走横梁上,此时滑动板在驱动件与抵接件的双重定位下,稳固的限位于直线导轨的相应位置上,保障滑动板上的机械臂实现精确焊接;
25、4.滑块固定在滑动板上,滑块与直线导轨之间除基础的燕尾槽定位连接之外,还通过连接块滑动连接在滑槽内,使得滑动板不易产生与直线导轨脱离的现象,滑动结构更加稳定。
技术特征:
1.一种焊接机械臂滑移机构,其特征在于:包含行走横梁(100)、安装有机械臂的滑动板(200)、驱动件(210),所述行走横梁(100)上设置有两条相互平行的直线导轨(110),所述滑动板(200)滑移连接在所述直线导轨(110)上,所述驱动件(210)安装在所述滑动板(200)上,所述驱动件(210)的驱动端朝向所述滑动板(200)的底部,且驱动端上连接有齿轮(220),所述行走横梁(100)位于两个所述直线导轨(110)之间设置有齿条(120),所述齿轮(220)与所述齿条(120)相啮合。
2.根据权利要求1所述的一种焊接机械臂滑移机构,其特征在于:所述直线导轨(110)位于所述滑动板(200)的两侧设置有防护罩(111),且所述防护罩(111)的外侧设置有罩贴板(112)。
3.根据权利要求1所述的一种焊接机械臂滑移机构,其特征在于:所述行走横梁(100)上还设置有安装座(130),所述安装座(130)上设置缓冲垫(131),所述缓冲垫(131)设置有两个,分别位于所述齿条(120)的左右两侧,且所述缓冲垫(131)的安装高度与所述滑动板(200)的安装高度相同。
4.根据权利要求1所述的一种焊接机械臂滑移机构,其特征在于:所述行走横梁(100)背离所述滑动板(200)的另一面设置有若干支撑杆(140),所述支撑杆(140)上设置有承接板(150),所述承接板(150)上开设有拖链槽(151),所述拖链槽(151)内设置有拖链(152)。
5.根据权利要求4所述的一种焊接机械臂滑移机构,其特征在于:所述滑动板(200)沿所述行走横梁(100)的顶部延伸,且朝向所述拖链(152)的一侧设置有连接架(160),所述拖链(152)的一端固设于所述连接架(160)上。
6.根据权利要求1所述的一种焊接机械臂滑移机构,其特征在于:所述滑动板(200)的顶部设置有防尘板(230),所述防尘板(230)靠近所述滑动板(200)与所述直线导轨(110)的连接处。
7.根据权利要求1所述的一种焊接机械臂滑移机构,其特征在于:所述滑动板(200)朝向于所述行走横梁(100)的一侧设置有抵接件(300),所述抵接件(300)的端部设置有限位块,所述行走横梁(100)上还设置有销座(170),所述销座(170)上设置有垫块(171),所述垫块(171)上安装有传感器(172),所述传感器(172)用于监测所述滑动板(200)停止时控制所述抵接件(300)带动所述限位块抵接于所述行走横梁(100)上。
8.根据权利要求1所述的一种焊接机械臂滑移机构,其特征在于:所述滑动板(200)与所述直线导轨(110)之间设置有滑块(113),所述滑块(113)与所述滑动板(200)固定连接,所述直线导轨(110)内开设有滑槽(114),所述滑槽(114)内设置有连接块(115),所述滑块(113)上开设有与所述滑槽(114)连通的开槽(116),所述连接块(115)穿过所述开槽(116)与所述滑块(113)连接。
9.根据权利要求8所述的一种焊接机械臂滑移机构,其特征在于:所述滑槽(114)为圆形结构,对应的所述连接块(115)位于所述滑槽(114)内的截面为圆形。
技术总结
本申请涉及焊接机械臂技术领域,提供了一种焊接机械臂滑移机构,包含行走横梁、安装有机械臂的滑动板、驱动件,所述行走横梁上设置有两条相互平行的直线导轨,所述滑动板滑移连接在所述直线导轨上,所述驱动件安装在所述滑动板上,所述驱动件的驱动端朝向所述滑动板的底部,且驱动端上连接有齿轮,所述行走横梁位于两个所述直线导轨之间设置有齿条,所述齿轮与所述齿条相啮合。基于此,本申请不会因滑动板在滑动时受到惯性作用而发生发生位置偏移,定位置精确,从而保证机械臂的焊接精度。
技术研发人员:李瑞泉,黄平华,李飞,万思,邹明勇
受保护的技术使用者:厦门松兴机器有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!