一种焊接机器人的制作方法
本发明涉及焊接机器人,特别涉及一种焊接机器人。
背景技术:
1、随着科技的发展焊接机器人以其焊接精度高、焊接效果好、焊接速度快的特点受到广泛应用,现有的焊接机器人一般是通过螺栓安装在地面上使用。
2、例如申请号为:cn201710363552.2本发明涉及一种焊接机器人,包括底座上转动设置的转盘,转盘上铰接设置有大臂杆且铰接轴水平,大臂杆的另一端铰接设置有小臂杆且铰接轴与大臂杆的铰接轴平行,小臂杆的另一端转动式设置有支撑架且铰接轴与小臂杆的铰接轴垂直,支撑架上设置有焊接头,焊接头内设置有焊丝的输送管,焊丝伸出输送管的管端,焊接头内设置有冷却水道,冷却水道与冷却水源连通,冷却水道贯穿整个焊接头,在焊接头内开设冷却水道,并且向冷却水道内通入冷却水,从而实施对焊接头的冷却,避免高温导致焊丝在输送管内融化导致的焊接头堵塞的问题,提高焊接头的使用寿命。
3、然而,现有的焊接机器人当需要更换工位时,需要先将机器人底座上的螺栓松开,将机器人从底座上拆下来,然后运输到需要安装的工位,然后将焊接机器人做好定位,然后将螺栓拧紧,操作麻烦,工作量较大,工作效率较低,同时运输中焊接机器人容易产生倾斜安全性不佳。
技术实现思路
1、有鉴于此,本发明提供一种焊接机器人,其通过采用四组增加了支撑范围,实现了对焊接机器人的良好支撑,有效避免在运输中焊接机器人出现倾斜,提高了运输安全性,通过固定安装定位块可以实现对焊接机器人进行良好的定位,保证后期焊接精度,同时可以有效替代手动定位,操作简单,提高了安装效率,实现了自动化锁紧,减少人工操作。
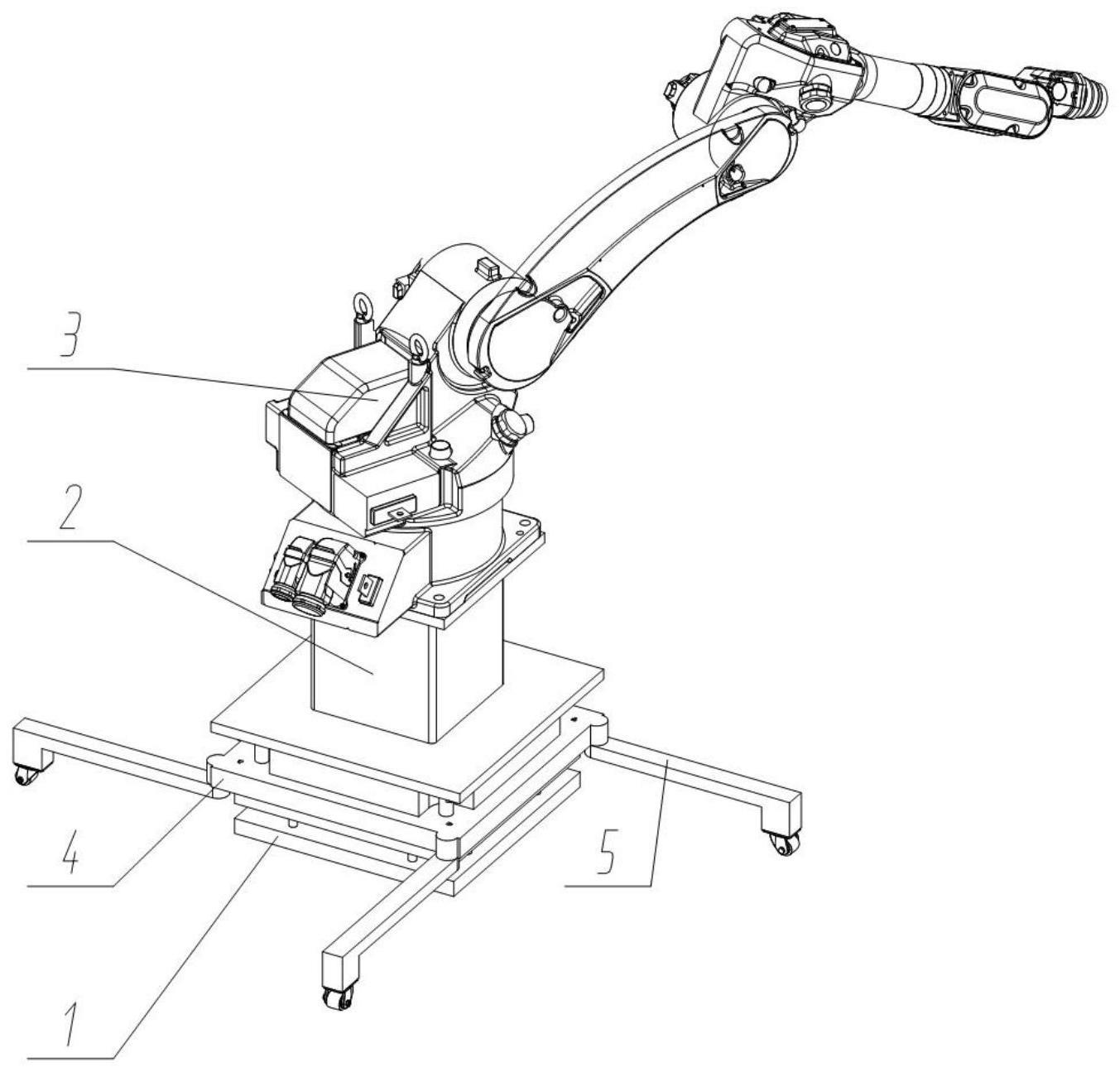
2、本发明提供了一种焊接机器人的目的与功效,具体包括:机器人下连接座;
3、固定安装座,所述固定安装座固定安装在地面上;
4、焊接机器人主体,焊接机器人主体固定连接在机器人下连接座的上端面;
5、支撑升降驱动件,支撑升降驱动件固定连接在机器人下连接座的中部;
6、支撑升降座,所述支撑升降座滑动连接在机器人下连接座的外侧;
7、支撑传动机构,支撑传动机构设置在机器人下连接座内部,支撑升降驱动件通过支撑传动机构带动支撑升降座上下滑动;
8、移动支腿,移动支腿共设置有四组,四组移动支腿圆周阵列排布转动连接在支撑升降座的底部,移动支腿的端部底部设置有万向滚轮;
9、支腿传动机构,支腿传动机构设置在支撑升降座内部,支撑升降座上下滑动通过支腿传动机构带动移动支腿摆动;
10、锁紧驱动件,锁紧驱动件固定连接在机器人下连接座内部;
11、锁紧螺母,锁紧螺母转动连接在机器人下连接座的内侧底部;
12、锁紧传动机构,锁紧驱动件通过锁紧传动机构带动所有锁紧螺母同时旋转;
13、松紧切换驱动件,松紧切换驱动件固定连接在机器人下连接座内侧。
14、进一步的,所述固定安装座包括有:固定安装定位块,固定安装定位块固定连接在固定安装座的顶部中心,固定安装定位块为上小下大的十字形锥台状结构
15、机器人下连接座包括有:固定定位孔,固定定位孔设置在机器人下连接座的底部中心,机器人下连接座为十字形结构。
16、进一步的,所述支撑传动机构包括有:
17、支撑升降丝杠,支撑升降丝杠共设置有四组,四组支撑升降丝杠圆周阵列排布转动连接在对机器人下连接座的内部,其中一组支撑升降丝杠与支撑升降驱动件的转轴同轴固定连接,四组支撑升降丝杠同时与支撑升降座螺纹连接共同构成丝杠螺母传动副;
18、支撑升降同步链轮,支撑升降同步链轮同轴固定连接在支撑升降丝杠的顶部,四组支撑升降同步链轮通过传动链条传动连接共同构成链条传动机构。
19、进一步的,所述支腿传动机构包括有:
20、折叠驱动齿条,折叠驱动齿条固定连接在机器人下连接座的四角下部;
21、折叠中间传动件,折叠中间传动件转动连接在支撑升降座的四角内部;
22、折叠从动齿轮,折叠从动齿轮同轴固定连接在折叠中间传动件的侧面,当支撑升降座滑动到顶部时,折叠驱动齿条与折叠从动齿轮啮合共同构成齿轮齿条传动机构。
23、进一步的,所述支腿传动机构包括有:
24、折叠主动锥齿轮,折叠主动锥齿轮同轴固定连接在折叠中间传动件的端部;
25、支腿从动锥齿轮,支腿从动锥齿轮同轴固定连接在移动支腿的转轴顶部,折叠主动锥齿轮与支腿从动锥齿轮啮合共同构成锥齿轮传动机构。
26、进一步的,所述锁紧传动机构包括有:
27、松紧切换驱动丝杠,松紧切换驱动丝杠共设置有两组,两组松紧切换驱动丝杠转动连接在机器人下连接座内部,其中一组松紧切换驱动丝杠与松紧切换驱动件的转轴同轴固定连接;
28、松紧切换滑动座,松紧切换滑动座滑动连接在机器人下连接座内部,两组松紧切换驱动丝杠同时与松紧切换滑动座螺纹传动连接共同构成丝杠螺母传动副;
29、松紧切换同动链轮,松紧切换同动链轮同轴固定连接在松紧切换驱动丝杠的顶部,两组松紧切换同动链轮之间通过链条传动连接共同构成链轮传动机构。
30、进一步的,所述锁紧传动机构包括有:
31、锁紧从动锥齿轮,锁紧从动锥齿轮转动连接在支撑升降座内部,锁紧从动锥齿轮位于锁紧螺母的外侧;
32、同动中间传动件,同动中间传动件转动连接在支撑升降座内部,同动中间传动件两端均同轴固定连接有锥齿轮,相邻两组锁紧从动锥齿轮之间通过锥齿轮传动机构与一组同动中间传动件传动连接,其中一组同动中间传动件与锁紧驱动件的转轴同轴固定连接。
33、进一步的,所述锁紧传动机构包括有:
34、锁紧花键槽,锁紧花键槽开设在锁紧从动锥齿轮内孔内部;
35、松紧切换拨动件,松紧切换拨动件转动连接在松紧切换滑动座底部;
36、锁紧花键齿,锁紧花键齿均匀排布设置在松紧切换拨动件的外侧,松紧切换拨动件通过锁紧花键齿与锁紧花键槽滑动连接。
37、进一步的,所述锁紧传动机构包括有:
38、锁紧拨齿,锁紧拨齿共设置有六对,六对锁紧拨齿圆周阵列排布滑动连接在松紧切换拨动件下部,每组锁紧拨齿的端部设置有一组反向跳过斜面,每对锁紧拨齿的反向跳过斜面反向设置;
39、跳齿弹簧,锁紧拨齿通过跳齿弹簧与松紧切换拨动件弹性连接;
40、锁紧拨动齿,锁紧拨动齿圆周阵列排布开设在锁紧螺母的外侧,锁紧拨齿与锁紧拨动齿之间构成卡块单向传动结构。
41、进一步的,所述固定安装座包括有:固定安装锁紧螺栓,固定安装锁紧螺栓固定连接在固定安装座的上端面,固定安装锁紧螺栓的位置与锁紧螺母的位置一一对应,锁紧螺母与固定安装锁紧螺栓螺纹连接。
42、有益效果
43、本发明通过采用四组增加了支撑范围,实现了对焊接机器人的良好支撑,有效避免在运输中焊接机器人出现倾斜,提高了运输安全性,通过固定安装定位块可以实现对焊接机器人进行良好的定位,保证后期焊接精度,同时可以有效替代手动定位,操作简单,提高了安装效率,实现了自动化锁紧,减少人工操作。
44、此外,将固定定位孔与固定安装定位块对齐,支撑升降驱动件带动其中一组支撑升降丝杠旋转,支撑升降丝杠通过链条传动机构带动四组支撑升降丝杠同时旋转,四组支撑升降丝杠通过由支撑升降丝杠与支撑升降座螺纹连接共同构成的丝杠螺母传动副带动支撑升降座往下滑动,通过支撑升降座的往下滑动实现了对机器人下连接座的落下,实现了焊接机器人的自动升降,固定定位孔卡入固定安装定位块内,通过固定安装定位块可以实现对焊接机器人进行良好的定位,保证后期焊接精度,同时可以有效替代手动定位,操作简单,提高了安装效率。
45、此外,支撑升降座继续往上滑动,当支撑升降座滑动到顶部时,在由折叠驱动齿条与折叠从动齿轮构成齿的轮齿条传动机构的作用下带动折叠中间传动件旋转,折叠中间传动件通过由折叠主动锥齿轮与支腿从动锥齿轮啮合共同构成的锥齿轮传动机构带动移动支腿旋转,实现移动支腿的摆动,实现移动支腿的折叠,通过四组移动支腿增加了支撑范围,实现了对焊接机器人的良好支撑,有效避免在运输中焊接机器人出现倾斜,提高了运输安全性;
46、此外,锁紧驱动件往复旋转,锁紧驱动件带动同动中间传动件旋转,同动中间传动件通过锥齿轮传动机构依次带动多组锁紧从动锥齿轮同时旋转,锁紧从动锥齿轮通过锁紧花键齿与锁紧花键槽带动松紧切换拨动件旋转,松紧切换拨动件通过锁紧拨齿与锁紧拨动齿之间构成的卡块单向传动结构带动锁紧螺母单向旋转,将锁紧螺母与固定安装锁紧螺栓螺纹连接,实现了固定安装座与机器人下连接座锁紧连接,通过锁紧驱动件的往复旋转和中间传动件传动作用实现了相邻两件锁紧螺母交错拧紧,保证了锁紧驱动件能够发挥更大的扭矩,保证了锁紧螺母的锁紧强度,实现了自动化锁紧,减少人工操作,提高了生产效率。
- 还没有人留言评论。精彩留言会获得点赞!