一种具有减震功能的全方位弯道U肋板内焊缝焊接装置
本发明涉及u肋板内焊焊接装置,特别涉及一种具有减震功能的全方位弯道u肋板内焊缝焊接装置。
背景技术:
1、在钢桥生产制造时,钢箱梁一般分成若干梁段,每个梁段划分成若干板单元,每个板单元都是带若干个u肋板的结构件。由于顶、底板单元件的焊接生产是整个钢箱梁生产制造的重要组成部分,u肋板与顶、底板内焊焊接有着较高的抗疲劳性能要求,其焊接质量是影响钢桥制造质量的关键要素。
2、常规桥梁u肋板一般采用半自动小车焊接,由于u肋板的宽度和弯曲形式特殊限制,使得u肋板焊接过程极其受限、工艺复杂繁琐,从而导致u肋板内焊焊接效率低下、形式简单、成本过高,成为桥梁钢结构焊接的一大难点。专利cn 114484150 b通过子母铆钉连接实现偏摆自由度,机器人机体中部包含两个舵机实现俯仰自由度,使得机身呈“z”字形支撑在竖直管道中实现机身长度的变化从而适应不同的管径,该机构虽然小巧敏捷但不能依靠自身重量平衡复杂的u肋板内焊缝焊接过程产生的震动。专利cn 113385870 b涉及一种自行走全场景式焊接车;包括底盘、设在底盘底部的行走轮单元,底盘的前部设有与焊接机器人本体相连且用于升降以及平衡稳定焊接机器人本体的升降平衡单元,该装置虽然可以根据工件的位置以及焊缝的位置进行自调整焊接,但考虑其体积较大且对于复杂焊接环境的适应性不强,远达不到对u肋板内焊缝焊接的效果。专利cn 113385786 b公开了一种用于小管径管道全位置自动焊接的焊接系统与焊接方法,通过夹持器底座上安装有快速夹持装置对排布的夹持定位角块和夹持转块进行相对运动从而实现小管道外焊焊接,该机构虽然能满足施工空间狭小环境且焊接设备体积小,但无法运用于内焊缝的焊接工作中。综合上述三种内焊缝焊接问题可知,首先装置无法通过自身机构的变化平衡焊接过程产生的大幅度震动,其次没有拥有柔和转向和紧凑支撑来确保焊接跟踪的精度和效率,最后必须保持焊枪的运动性适应复杂的u肋板内焊缝类型。
3、为了克服上述相关问题,同时考虑到桥梁u肋板内焊缝焊接装置一般重量比较小所产生的的惯性也比较小,对焊接过程的震动的平衡比较受限,从而需要一种具有减震功能的全方位弯道u肋板内焊缝焊接装置来弥补这方面的缺陷,本发明综合考虑前述三种装置的不足,创造性的提出采用自动减震系统来平衡焊枪的移动产生相关惯性以保障焊枪对u肋板内焊缝的精确性跟踪,同时为了保证装置的体积足够小以适应u肋板的大小提出采用伸缩机构来满足减小体积的作用,而使用双电机锥齿轮的柔性转向机构和自动回弹机构极大的保证了转弯的平稳性,增强焊接装置的稳定性焊接。
技术实现思路
1、本发明要解决的技术问题是:多变的u肋板宽度、复杂的u肋板弯曲形式、焊接过程的柔和性和减震性。
2、本发明针对现有技术的不足,提供一种具有减震功能的全方位弯道u肋板内焊缝焊接装置。基本改进想法如下:
3、(1)以柔性万向连接机构中的铰链销单元和柔性齿轮转向机构的结合使用,能够满足敏捷的行驶于弯曲u肋板中,同时由于运用齿轮的啮合传动可提高转向的精度。基于该机构完全适用于不同类型的焊接环境,从而提高焊接装置的适应性和焊接效率的高效性;
4、(2)使用自动回弹支撑机构和减震式伸缩机构的结构形式,即使在焊接过程中可能面临不确性的复杂情况,但通过减震式伸缩机构的压力传感片和多目标进化算法的使用,可保障焊接装置的安全性和焊接装置行驶轨迹跟踪的精确性,以及焊接装置在行驶弯曲环境的平稳性;
5、(3)把十字滑架以立柱中心点的位置对称用来适应焊枪在焊接过程导致的重心位置变化,从而提高焊接跟踪精度和焊接装置稳定性,同时十字滑架的左右滑动可适用于多类型的u肋板的宽度。
6、为实现上述目的,本发明提供如下技术方案:
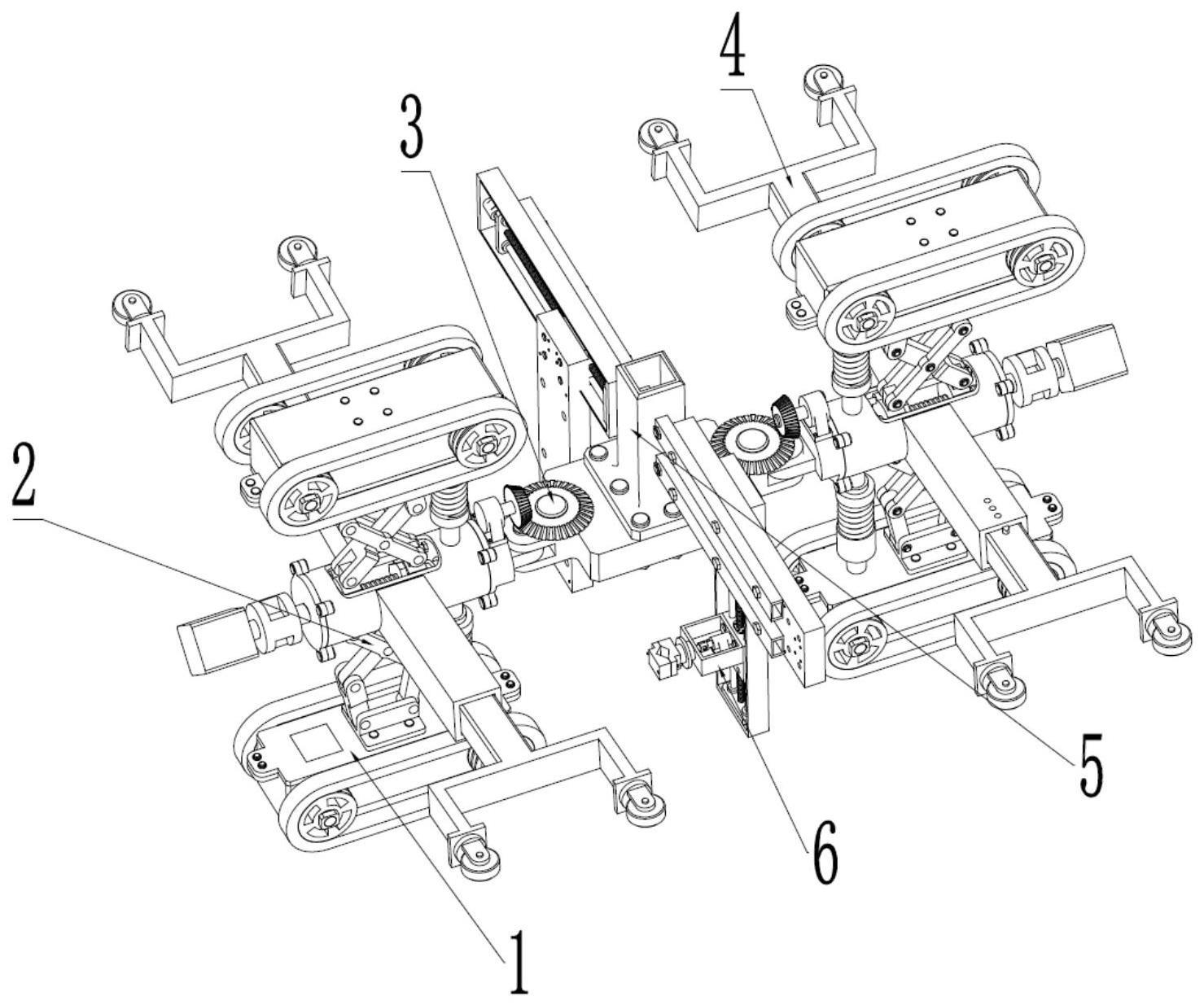
7、一种具有减震功能的全方位弯道u肋板内焊缝焊接装置包括平面长方形驱动机构、减震式伸缩机构、柔性万向连接机构、自动回弹支撑机构、t字形载物机构、焊枪角度变化机构;
8、根据权利要求1所述的一种具有减震功能的全方位弯道u肋板内焊缝焊接装置,其特征在于:首先通过平面长方形驱动机构为焊接装置提供稳定可靠动力,同时将压力传感器置于平面长方形驱动机构中通过智能控制系统反馈信号实时调节运动的平稳性,减少焊接过程中u肋板对装置反冲击力的破坏;然后减震式伸缩机构能精确的自动适应多种类u肋板高低度环境无需人工调节,其中自动液压弹簧能够吸收十字滑架运动产生的动能以缓冲装置行驶中的过大震动,提高焊缝跟踪的稳定性和精确度;其次在遇到复杂的弯曲u肋板时,柔性万向连接机构的双电机锥齿轮机构可实现精准角度的变向功能和柔性的转向过程,满足于平稳的弯曲焊接;然后当过弯道时挤压力过大或过小时,自动回弹支撑机构中的弹簧会通过自身的强弹性摆脱或支撑凸点的阻力,直接自动回弹自适应拐弯过程的挤压力;最后通过焊枪角度变化机构上的焊枪实现对u肋板内焊缝的焊接过程,保证焊缝跟踪的质量和高效。
9、进一步地,平面长方形驱动机构的伺服电机通过螺栓结构与小车外壳固定连接;伺服电机通过联轴器将旋转动力传递到与大锥齿轮齿轮啮合的小锥齿轮上;大锥齿轮通过键槽上键连接将带动主动转轴转动,同时滚动轴承被镶嵌在主动转轴的轴肩旁将旋转动力传递到履带轮上,从而使得履带将主动转轴的动力传递到从动转轴上;主动转轴和从动转轴两端设有与固定螺母相配合的螺纹且螺栓连接固定。
10、进一步地,减震式伸缩机构的槽型底板两端分别通过螺栓连接于y型连杆、薄片连杆的一端和平面长方形驱动机构的小车外壳上;y型连杆和薄片连杆的另一端分别通过螺栓连接于柔性万向连接机构的小四耳圆环和大四耳圆环上;压力传感片直接贴敷于小车外壳上,用于检测减震式伸缩机构在进行伸缩动作时u肋板产生的反冲击力反馈给智能控制系统;自动液压弹簧两端分别焊接于圆筒和小车外壳上。
11、进一步地,基于减震式伸缩机构的连杆伸缩作用和自动液压弹簧结构通过智能控制系统接收压力传感片的反馈信号来平衡焊枪角度变化机构对上下线运动时产生的动能和反冲击力,从而避免装置工作时产生上下窜动的影响使结构的调节更加柔和和稳定,同时满足于全方位的u肋板高度类型。
12、进一步地,柔性万向连接机构的底板通过大铰链销铰链连接于t型连接板上起到变向转弯的作用;底板通过螺栓连接与t字形载物机构相连且支撑作用;所述柔性转向机构两端分别焊接方法于底板和t型连接板,通过一对锥齿轮啮合改变行驶方向的精确大小;圆柱两端分别焊接于t型连接板和梯形丝杆机构,弹簧直接放置于圆柱上将大四耳圆环压紧于梯形丝杆机构的一端起到固定作用;大四耳圆环和小四耳圆环通过间隙配合与滑杆相连,同时滑杆对减震式伸缩机构起到了强有力的支撑效果;大四耳圆环与圆柱间隙配合便于滑行,小四耳圆环通过焊接方法与梯形丝杆螺帽焊接为一体;梯形丝杆螺帽的自锁功能可对减震式伸缩机构运动起到最佳的锁定效果;减震式伸缩机构分别通过螺栓连接于大四耳圆环和小四耳圆环上放置于柔性万向连接机构的上下对称位置。
13、进一步地,柔性齿轮转向机构的两端分别焊接于t型连接板和底板上,小电机与小锥齿轮通过键连接传递旋转动力;大锥齿轮与短轴直接焊接固连;通过小锥齿轮的旋转带动固连于底板的大锥齿轮的齿轮传动,从而实现柔性转向的功能。
14、进一步地,自动回弹支撑机构的圆筒与正方形薄柱通过焊接方法为一体;大弹簧直接放置于正方形薄柱中,两端分别接触圆筒和y型支撑架。
15、进一步地,当自动回弹支撑机构进入u肋板时,在大弹簧的受压缩作用下,使得y型支撑架上凸点会进入到正方形薄柱的薄柱槽里对u肋板内壁进行支撑作用;当大弹簧所受到的压缩力小于凸点对薄柱槽的阻力时,大弹簧就会直接从薄柱槽里滑出来自动回弹到原来位置上,确保装置在直线和弯道行驶时稳定性和敏捷性。
16、进一步地,t字形载物机构的立柱和底座通过焊接方法焊接为一体;横梁直接横穿于立柱槽上,通过螺栓连接固定于立柱上;横梁通过螺栓与十字滑架进行固定的螺栓连接起到稳定的支撑作用;焊枪机构载物台通过螺栓与焊枪角度变化机构的外壳进行螺栓连接起到稳定的支撑效果;底座通过螺栓与柔性万向连接机构的底板进行螺栓连接起到有力的支撑作用。
17、进一步地,考虑到十字滑架在工作时会产生重心位置的变化,从而产生倾覆力矩对工作产生影响,通过将十字滑架以立柱的原点位置为中心的中心对称摆放的方法来消除影响。
18、进一步地,焊枪角度变化机构的角度变化伺服电机通过螺栓连接在外壳的内部上,通过角度联轴器将角度变化伺服电机的旋转动力传递到连接转轴上从而对焊枪进行角度大小的控制;连接转轴与外壳之间镶嵌于滚子轴承来防止连接转轴工作时的过度磨损;连接转轴通过焊接方法与焊枪夹具的一部分焊接为一体,而焊枪夹具的另一部分通过螺栓连接;夹紧调节器可根据焊枪的角度大小和位置来调节焊枪夹具的松紧状态达到焊枪姿态的最佳状态。
19、本发明的有益效果:
20、1、本发明中自动回弹支撑机构和减震式伸缩机构相结合,通过本身的智能控制系统和弹簧的回弹性结合减小焊接装置行驶过程中产生的震动,提高焊接状态和装置行驶形式的稳定性、高效性,从而提升焊枪对焊缝跟踪的精度,为弯曲复杂多类型的u肋板内焊缝提供实质性的技术保障。
21、2、本发明中采用柔性万向连接机构,通过其中一对啮合锥齿轮的齿轮传动运动来实现焊接装置在弯曲u肋板内焊缝焊接时的拐弯功能,同时运用齿轮传动的优点可以提升拐弯过程的柔性从而减小产生的小振动。该机构可适用于复杂的焊接情况以及多种类的u肋板内焊缝形式,即大幅度提高弯曲u肋板内焊缝焊接的效率和质量。
22、3、本发明中使用十字滑架作为焊枪控制的运动载体,是为了使焊枪可适应于不同宽度u肋板的类型,提高内焊缝焊接装置的多功能性和强适应性,同时将十字滑架进行中心对称摆放可减小惯性从而增强装置稳定性,不需考虑由于焊枪位置改变而产生重心位置的变化。
23、4、本发明中使用焊枪角度变化器是焊缝跟踪精度性的利器,通过对焊枪角度变化器和十字滑架的共同调节即可实现焊枪的枪头精准调节控制,从而实现焊缝的精确跟踪大大提高焊接的质量。
24、5、本发明装置既可以满足多种类不同宽度的u肋板类型,又可以对弯曲复杂形式的u肋板内焊缝进行精确的焊接,同时整个装置的振动影响几乎很小,从而大大提高内焊缝焊接的质量和焊缝跟踪的精度,保障行驶过程和焊接过程平稳进行。
- 还没有人留言评论。精彩留言会获得点赞!