一种用于轴系定位抓取的机器人端拾器的制作方法
本发明涉及了机器人移动,尤其涉及一种用于轴系定位抓取的机器人端拾器。
背景技术:
1、在变速箱的生产过程中,需要将组装好的轴系压装在变速箱中,人工将轴系从轴系装配线下线端搬运至变速箱线上线工位壳体内,劳动强度大,搬运过程中容易磕碰,放置位置不准,后续进行压装工艺时还需要二次调整。现有技术中的一些自动化搬运工装,一般是夹持在轴系的侧面,在压装的过程中容易导致轴系损坏,而且在压装的过程中也需要对轴系进行二次定位,压装效率低,压装质量不稳定。
技术实现思路
1、本发明的目的是为了克服现有技术的不足,提供一种用于轴系定位抓取的机器人端拾器,能够改善对轴系的定位精度,提高对轴系的压装效率和压装质量。
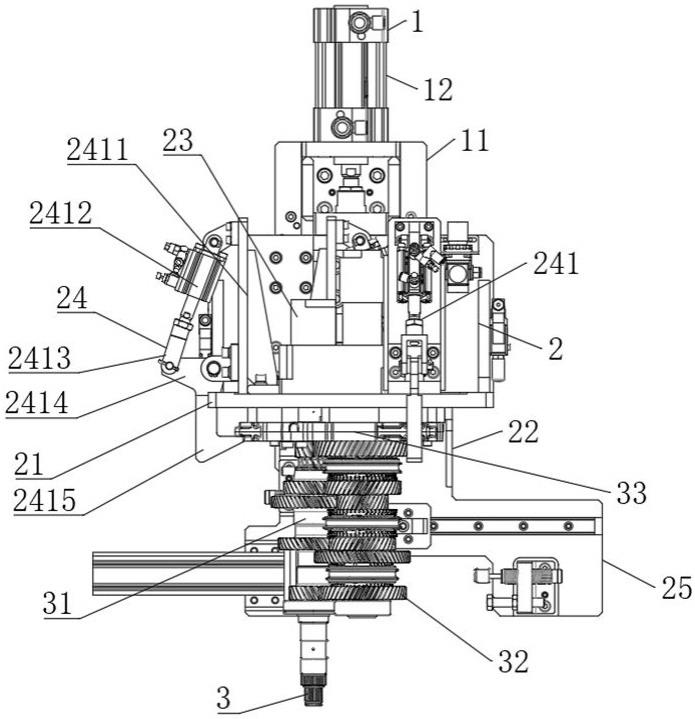
2、本发明涉及的一种用于轴系定位抓取的机器人端拾器,包括升降装置和端拾器本体及待抓取的轴系,所述端拾器本体包括横向固定板、垂直固定板、定位装置、夹紧装置和限位装置,所述轴系包括轴体、齿轮组和定位盘,所述轴体上端与定位盘连接且所述轴体穿过所述定位盘和所述横向固定板,所述齿轮组包括若干个齿轮,在其中两个所述齿轮之间形成有限位区间;
3、所述升降装置通过安装架与所述横向固定板连接,所述垂直固定板连接在所述横向固定板的下表面,所述定位装置连接在所述横向固定板的上表面,定位装置包括定位顶尖,所述定位顶尖穿过所述横向固定板并伸入开设在轴体上端的定位孔中,所述夹紧装置包括同步运动的第一夹紧组件、第二夹紧组件和第三夹紧组件,所述第一夹紧组件、第二夹紧组件和第三夹紧组件之间形成对定位盘进行夹紧的夹紧区间,所述限位装置包括限位滑块和限位块,所述限位滑块可滑动的与所述垂直固定板连接,所述限位块与所述限位滑块连接,所述限位区间位于所述限位块的运动路径上。
4、进一步地,所述定位装置包括下端开口的空心套筒,所述空心套筒内设置有弹性件,所述弹性件下端与所述定位顶尖接触,所述定位顶尖至少部分位于所述空心套筒中,所述空心套筒的下表面与所述横向固定板的上表面接触,所述弹性件处于压缩状态。
5、进一步地,所述限位装置包括限位固定板、限位导轨和限位气缸,所述限位固定板与垂直固定板连接,所述限位导轨沿限位固定板横向延伸,所述限位气缸与限位固定板连接,所述限位滑块与所述限位气缸的气缸杆连接。
6、进一步地,所述升降装置包括升降固定架和升降气缸,所述升降气缸与所述升降固定架连接,所述升降气缸的气缸杆与所述垂直固定板连接。
7、进一步地,所述第一夹紧组件连接在横向定位板的右侧,所述第一夹紧组件包括第一夹紧架、第一夹紧气缸、第一铰接杆、第一铰接块和第一夹紧块,所述第一夹紧架连接在所述横向定位板的上表面,所述第一夹紧气缸铰接在所述第一夹紧架的外侧,所述第一铰接杆的一端与所述第一夹紧气缸的气缸杆的下端连接,所述第一铰接杆的另一端与所述第一铰接块的外侧铰接,所述第一铰接块的内侧与所述第一夹紧架的外侧铰接,所述第一夹紧块连接在所述第一铰接块下端,当定位盘处于夹紧状态时,所述第一夹紧块的上表面与所述定位盘的第一定位槽接触,所述第一定位槽开设在所述定位盘的下表面。
8、进一步地,所述第二夹紧组件连接在所述横向定位板的左侧,包括第二夹紧架、第二夹紧气缸、第二铰接杆、第二铰接块和第二夹紧块,所述第二夹紧架连接在所述横向定位板的上表面,所述第二夹紧气缸铰接在所述第二夹紧架的外侧,所述第二铰接杆的一端与所述第二夹紧气缸的气缸杆的下端连接,所述第二铰接杆的另一端与所述第二铰接块的外侧铰接,所述第二铰接块的内侧与所述第二夹紧架的外侧铰接,所述第二夹紧块连接在所述第二铰接块下端,当定位盘处于夹紧状态时,所述第二夹紧块的上表面与所述定位盘的第二定位槽接触,所述第二定位槽开设在所述定位盘的下表面,所述横向定位板的左侧开设有避让槽,所述第二夹紧块至少部分穿过所述避让槽。
9、进一步地,所述第三夹紧组件连接在所述横向定位板的后侧,所述第三夹紧组件包括第三夹紧架、第三夹紧气缸、第三铰接杆、第三铰接块和第三夹紧块,所述第三夹紧气缸铰接在所述第三夹紧架的外侧,所述第三铰接杆的一端与所述第三夹紧气缸的气缸杆的下端连接,所述第三铰接杆的另一端与所述第三铰接块的外侧铰接,所述第三铰接块的内侧与所述第三夹紧架的外侧铰接,所述第三夹紧块连接在所述第三铰接块下端,当定位盘处于夹紧状态时,所述第三夹紧块的上表面与所述定位盘的第三定位槽接触,所述第三定位槽开设在所述定位盘的下表面,所述横向定位板的上表面开设有贯穿所述横向定位板的避让孔,所述第三夹紧块至少部分位于所述避让孔中。
10、进一步地,所述限位固定板的右侧连接有弹性限位杆,所述弹性限位杆位于所述限位滑块的行走路径上。
11、进一步地,所述升降气缸的进气管道连接有调压阀,所述调压阀用于对升降气缸的下压压力进行调节。
12、进一步地,所述横向固定板的上表面连接有压装块,所述压装块的上表面开设有贯穿所述压装块的导向孔,所述空心套筒穿过所述导向孔。
13、本发明的有益之处在于:
14、1.轴系在放置在托盘中处于初定位状态,通过定位顶尖将轴系在轴心方向上定位,弹性件缓冲回弹,然后通过第一夹紧组件、第二夹紧组件和第三夹紧组件夹持定位盘的下表面,实现对轴系的精定位。
15、2.轴系压装过程中,下端面在放置过程中需要贴合变速箱壳体上端面,如果不避开则需要在合严实前松开第一夹紧块、第二夹紧块及第三夹紧块,降低对轴系的压装质量,甚至对轴系或变速箱造成破坏,第一夹紧块、第二夹紧块和第三夹紧块与轴系的接触位置巧妙的避开了轴系下端面,在压装过程不仅无需将第一夹紧块、第二夹紧块及第三夹紧块松开,而且能够避免对轴系的二次定位,提高对轴系的压装质量和压装效率。
16、3.在压装过程中,端拾器本体会跟随轴系的压入进行下移,升降气缸连接的调压阀会切换至中间位(中泄位),使得升降气缸处于浮动状态,整个端拾器本体随动下移,避免下压力的波动导致机器人超负载,降低用于轴系定位抓取的机器人端拾器和轴系的受损几率,进一步提高压装质量。
17、为让本发明的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明如下。
技术特征:
1.一种用于轴系定位抓取的机器人端拾器,其特征在于:包括升降装置和端拾器本体及待抓取的轴系,所述端拾器本体包括横向固定板、垂直固定板、定位装置、夹紧装置和限位装置,所述轴系包括轴体、齿轮组和定位盘,所述轴体上端与定位盘连接且所述轴体穿过所述定位盘和所述横向固定板,所述齿轮组包括若干个齿轮,在其中两个所述齿轮之间形成有限位区间;
2.根据权利要求1所述的用于轴系定位抓取的机器人端拾器,其特征在于:所述定位装置包括下端开口的空心套筒,所述空心套筒内设置有弹性件,所述弹性件下端与所述定位顶尖接触,所述定位顶尖至少部分位于所述空心套筒中,所述空心套筒的下表面与所述横向固定板的上表面接触,所述弹性件处于压缩状态。
3.根据权利要求1所述的用于轴系定位抓取的机器人端拾器,其特征在于:所述限位装置包括限位固定板、限位导轨和限位气缸,所述限位固定板与垂直固定板连接,所述限位导轨沿限位固定板横向延伸,所述限位气缸与限位固定板连接,所述限位滑块与所述限位气缸的气缸杆连接。
4.根据权利要求1所述的用于轴系定位抓取的机器人端拾器,其特征在于:所述升降装置包括升降固定架和升降气缸,所述升降气缸与所述升降固定架连接,所述升降气缸的气缸杆与所述垂直固定板连接。
5.根据权利要求1所述的用于轴系定位抓取的机器人端拾器,其特征在于:所述第一夹紧组件连接在横向定位板的右侧,所述第一夹紧组件包括第一夹紧架、第一夹紧气缸、第一铰接杆、第一铰接块和第一夹紧块,所述第一夹紧架连接在所述横向定位板的上表面,所述第一夹紧气缸铰接在所述第一夹紧架的外侧,所述第一铰接杆的一端与所述第一夹紧气缸的气缸杆的下端连接,所述第一铰接杆的另一端与所述第一铰接块的外侧铰接,所述第一铰接块的内侧与所述第一夹紧架的外侧铰接,所述第一夹紧块连接在所述第一铰接块下端,当定位盘处于夹紧状态时,所述第一夹紧块的上表面与所述定位盘的第一定位槽接触,所述第一定位槽开设在所述定位盘的下表面。
6.根据权利要求5所述的用于轴系定位抓取的机器人端拾器,其特征在于:所述第二夹紧组件连接在所述横向定位板的左侧,包括第二夹紧架、第二夹紧气缸、第二铰接杆、第二铰接块和第二夹紧块,所述第二夹紧架连接在所述横向定位板的上表面,所述第二夹紧气缸铰接在所述第二夹紧架的外侧,所述第二铰接杆的一端与所述第二夹紧气缸的气缸杆的下端连接,所述第二铰接杆的另一端与所述第二铰接块的外侧铰接,所述第二铰接块的内侧与所述第二夹紧架的外侧铰接,所述第二夹紧块连接在所述第二铰接块下端,当定位盘处于夹紧状态时,所述第二夹紧块的上表面与所述定位盘的第二定位槽接触,所述第二定位槽开设在所述定位盘的下表面,所述横向定位板的左侧开设有避让槽,所述第二夹紧块至少部分穿过所述避让槽。
7.根据权利要求6所述的用于轴系定位抓取的机器人端拾器,其特征在于:所述第三夹紧组件连接在所述横向定位板的后侧,所述第三夹紧组件包括第三夹紧架、第三夹紧气缸、第三铰接杆、第三铰接块和第三夹紧块,所述第三夹紧气缸铰接在所述第三夹紧架的外侧,所述第三铰接杆的一端与所述第三夹紧气缸的气缸杆的下端连接,所述第三铰接杆的另一端与所述第三铰接块的外侧铰接,所述第三铰接块的内侧与所述第三夹紧架的外侧铰接,所述第三夹紧块连接在所述第三铰接块下端,当定位盘处于夹紧状态时,所述第三夹紧块的上表面与所述定位盘的第三定位槽接触,所述第三定位槽开设在所述定位盘的下表面,所述横向定位板的上表面开设有贯穿所述横向定位板的避让孔,所述第三夹紧块至少部分位于所述避让孔中。
8.根据权利要求3所述的用于轴系定位抓取的机器人端拾器,其特征在于:所述限位固定板的右侧连接有弹性限位杆,所述弹性限位杆位于所述限位滑块的行走路径上。
9.根据权利要求4所述的用于轴系定位抓取的机器人端拾器,其特征在于:所述升降气缸的进气管道连接有调压阀,所述调压阀用于对升降气缸的下压压力进行调节。
10.根据权利要求2所述的用于轴系定位抓取的机器人端拾器,其特征在于:所述横向固定板的上表面连接有压装块,所述压装块的上表面开设有贯穿所述压装块的导向孔,所述空心套筒穿过所述导向孔。
技术总结
本发明涉及的一种用于轴系定位抓取的机器人端拾器,包括升降装置和端拾器本体及待抓取的轴系,端拾器本体包括横向固定板、垂直固定板、定位装置、夹紧装置和限位装置,轴系包括轴体、齿轮组和定位盘,轴体上端与定位盘连接且轴体穿过定位盘和横向固定板,升降装置通过安装架与横向固定板连接,垂直固定板连接在横向固定板的下表面,定位装置连接在横向固定板的上表面,定位装置包括定位顶尖,定位顶尖入开设在轴体上端的定位孔中,夹紧装置包括同步运动的第一夹紧组件、第二夹紧组件和第三夹紧组件。本发明的有益之处在于:能够改善对轴系的定位精度,提高对轴系的压装效率和压装质量。
技术研发人员:王耀冰,吕荣生
受保护的技术使用者:苏州海通机器人系统有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!