一种协作机器人上下料工作站的制作方法
本发明属于自动化设备,尤其涉及一种协作机器人上下料工作站。
背景技术:
1、随着工业生产的不断发展,现代机械制造中对于精度要求较高和表面粗糙度要求较细的零件,大多都需要在机床上进行切削加工。传统的机床加工大部分还是采用人工上、下料的方式,由于其重复性和单一性,工作人员易出现注意力不集中等情况导致疲劳操作,降低了生产效率和产品质量。现如今,协作机器人上下料工作站以其具有高效率和高稳定性,结构简单易维护,可快速响应不同种类产品的生产等优势,正在逐渐取代人工作业,成为越来越多工厂的理想选择。但是,现有的协作机器人上下料工作站结构复杂、造价居高不下,严重阻碍了其推广和应用。以滑台版上下料工作站为例,为了实现托盘左右滑动带来的换料便捷性,增加了很多电、气机构,显著增加了生产和维护成本,却并未增加料盘容量。而三叶草版上下料工作平台虽然有三个料盘,保证了料盘容量,但其布局极不合理,不仅增加了占地面积,还加大了对机器人臂展的需求,不便于匹配小臂展的机器人,进而增大了上下料工作站的整体成本。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种能够保证料盘容量,结构简单,占地面积小,对机器人臂展要求较低的协作机器人上下料工作站。
2、为达到上述目的,本发明采用如下技术方案。
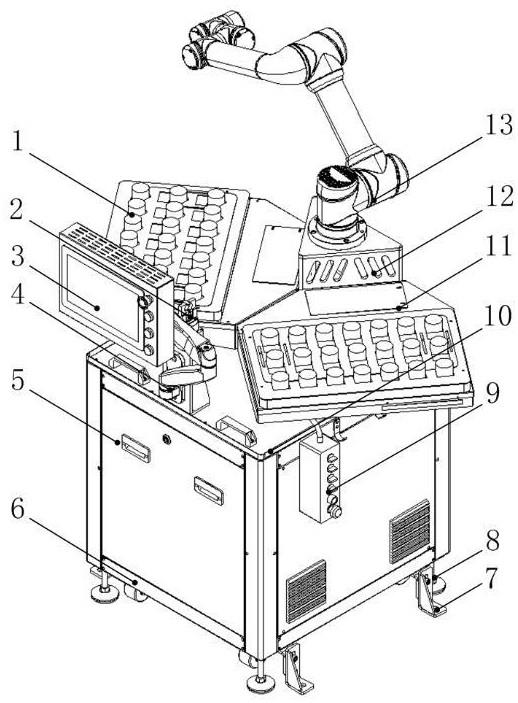
3、一种协作机器人上下料工作站,包括机柜,所述机柜的上方靠近后侧壁处固定连接有三棱柱状的安装座,所述安装座的上方设置有机械臂,所述安装座的左右两侧分别与托盘螺栓连接,所述托盘的上表面放置有物料盘,所述安装座的正前方设置有二次定位组件,所述机柜上设置有触摸屏支架,所述触摸屏支架的末端设置有触摸屏,所述机柜底部的四个角端安装有便于短途移动的万向轮。
4、进一步的,所述托盘为轻量化的格栅式框架结构,包括所述托盘的前侧面设置的安装孔和底面固定连接的加强筋。
5、进一步的,所述安装座在水平面上的投影为等腰三角形,所述安装座的左、右两侧安装面分别与托盘前侧面的安装孔螺栓连接,且左、右两侧托盘之间的缝隙与安装座的左、右两侧面之间夹角的角平分线重合。
6、进一步的,在双托盘模式下,当所述托盘的内侧长边与机械臂在水平面上的最小工作半径的圆相切,所述托盘的外侧长边与机械臂在水平面上的最大工作半径的圆内接时,可使托盘的面积达到最大,可根据实际需要将托盘设置于有效工作范围之内。
7、进一步的,所述机床靠近工作站放置,所述机床的卡盘在机械臂的有效工作范围之内。
8、进一步的,所述二次定位组件包括固定座,所述固定座的前侧安装有气缸,所述气缸的正上方设置有转动部,所述转动部的上表面左右对称安装有滑动部,所述滑动部的上方与卡爪固定连接。
9、进一步的,所述机柜一侧设置有可移动的调试控制盒,所述调试控制盒与工作站内部的气动元件电连接。
10、进一步的,所述机柜的上表面四周设置有挡水檐,以防止滴落的切削液四处流淌。
11、进一步的,所述机柜底部的四个角端分别设置有用于调节平衡的脚杯和防止侧倾或移位的地脚。
12、本发明采用以上方案,相比现有技术具有如下优点。
13、本装置通过对安装座和托盘的优化设计和合理布局,料盘容量大,占地面积小,既能降低对机械臂臂展的要求,又能在工作站和机床之间留出足够的空间,以便于工作人员调试检修。
14、本装置设置有二次定位组件,通过滑动部和转动部的相互配合,使卡爪可夹持不同规格的工件进行旋转,满足了机加工过程中工件需要更换加工面和重新定位的需求,适用性强,降低了企业生产小批量多规格产品的成本,有利于技术推广和应用。
15、本装置设置有可移动的调试控制盒,当工作站切换为调试模式时,工作人员可通过调试控制盒远程操控各气动元件的开合,增强了人机交互的便捷性。
技术特征:
1.一种协作机器人上下料工作站,包括机柜,所述机柜的上方靠近后侧壁处固定连接有三棱柱状的安装座,所述安装座的上方设置有机械臂,所述安装座的左右两侧分别与托盘螺栓连接,所述托盘的上表面放置有物料盘,所述安装座的正前方设置有二次定位组件,所述机柜上设置有触摸屏支架,所述触摸屏支架的末端设置有触摸屏,所述机柜底部的四个角端安装有便于短途移动的万向轮。
2.根据权利要求1所述的一种协作机器人上下料工作站,其特征在于:所述托盘为轻量化的格栅式框架结构,包括所述托盘的前侧面设置的安装孔和底面固定连接的加强筋。
3.根据权利要求1所述的一种协作机器人上下料工作站,其特征在于:所述安装座在水平面上的投影为等腰三角形,所述安装座的左、右两侧安装面分别与托盘前侧面的安装孔螺栓连接,且左、右两侧托盘之间的缝隙与安装座的左、右两侧面之间夹角的角平分线重合。
4.根据权利要求1所述的一种协作机器人上下料工作站,其特征在于:在双托盘模式下,当所述托盘的内侧长边与机械臂在水平面上的最小工作半径的圆相切,所述托盘的外侧长边与机械臂在水平面上的最大工作半径的圆内接时,可使托盘的面积达到最大,可根据实际需要将托盘设置于有效工作范围之内。
5.根据权利要求1所述的一种协作机器人上下料工作站,其特征在于:所述机床靠近工作站放置,所述机床的卡盘在机械臂的有效工作范围之内。
6.根据权利要求1所述的一种协作机器人上下料工作站,其特征在于:所述二次定位组件包括固定座,所述固定座的前侧安装有气缸,所述气缸的正上方设置有转动部,所述转动部的上表面左右对称安装有滑动部,所述滑动部的上方与卡爪固定连接。
7.根据权利要求1所述的一种协作机器人上下料工作站,其特征在于:所述机柜一侧设置有可移动的调试控制盒,所述调试控制盒与工作站内部的气动元件电连接。
8.根据权利要求1所述的一种协作机器人上下料工作站,其特征在于:所述机柜的上表面四周设置有挡水檐,以防止滴落的切削液四处流淌。
9.根据权利要求1所述的一种协作机器人上下料工作站,其特征在于:所述机柜底部的四个角端分别设置有用于调节平衡的脚杯和防止侧倾或移位的地脚。
技术总结
本发明属于自动化设备技术领域,尤其涉及一种协作机器人上下料工作站,以解决现有技术中结构复杂、造价居高不下等问题。本装置通过对安装座和托盘的优化设计和合理布局,料盘容量大,占地面积小,既能降低对机械臂臂展的要求,又能在工作站和机床之间留出足够的空间,便于调试检修。设置了二次定位组件,通过滑动部和转动部的相互配合,使卡爪可夹持不同规格的工件进行旋转,满足了机加工过程中工件需要更换加工面和重新定位的需求,适用性强,降低了企业生产小批量多规格产品的成本,有利于技术推广和应用。设置了可移动的调试控制盒,调试模式下可通过调试控制盒远程操控各气动元件的开合,增强了人机交互的便捷性。
技术研发人员:刘鹤
受保护的技术使用者:苏州佳途信息科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!