基于刀库的机器人换刀控制方法及系统与流程
本发明涉及机器人加工,提供了一种基于刀库的机器人换刀控制方法及系统。
背景技术:
1、刀库作为钻铣中一个储存刀具的装置,现有的刀库一般与机床配合使用,刀库一般由刀仓、倒回刀机构、换刀机构组成,刀库中存在多个刀座,每个刀座上用于放置一个刀具,倒回刀机构用于控制刀座执行倒刀及回刀操作,换刀机构用于两个刀具的位置互换,因此,刀库控制的稳定性、准确性和速度会影响钻铣的加工效率和性能。
2、机器人钻铣是一种新型加工方式,由于这种加工方式的灵活性高、可达性高,且设备资金投入低,汽车企业尝试将机器人钻铣应用于汽车白车身铝型材零部件或者铸铝件的钻铣加工。
3、汽车白车身铝型材零部件及铸铝件的钻铣加工过程相对复杂,加工过程需要多次换刀,因此,需要配合刀库使用,目前刀库都是配合机床使用,刀库的控制程序是集成在机床系统里,且机床中的换刀标准与机器人工作站中的是不同的,因此,现有的刀库控制方法无法适用于机器人。
技术实现思路
1、鉴于此,本申请提供一种基于刀库的机器人换刀控制方法,旨在改善上述问题。
2、具体而言,包括以下的技术方案:
3、一方面,本申请实施例提供了一种基于刀库的机器人换刀控制方法,机器人及刀库分别基于取刀指令执行如下操作:
4、(11)机器人基于取刀指令检测当前是否处于空闲状态,若检测结果为是,则机器人控制末端运行至换刀位置1,若检测结果为否,则在当前任务执行完毕后,机器人控制末端运行至换刀位置1;
5、(12)刀库基于取刀指令控制目标刀具所在的刀座运行至换刀位置2;
6、(13)控制目标刀座执行倒刀动作;
7、(14)换刀机构处于换刀机构原位,换刀机构两端的取刀机构处于换刀机构原位,控制取刀机构伸至工作位,控制机器人末端的电主轴夹头松开当前刀具;
8、(15)换刀机构下降至低位,将目标刀具传送至换刀位置1的同时将当前刀具转送至换刀位置2,换刀机构上升至换刀机构原位后,控制机器人末端的电主轴夹头夹紧,取刀机构缩回取刀机构原位;
9、(16)控制目标刀座回刀完成取刀操作。
10、在一些实施例中,目标刀座的确定方法具体如下:
11、(17)基于刀座-刀具映射表来查找目标刀具标识号对应的刀座标识号,即为目标刀座;
12、(18)在开始换刀机构下降时,将目标刀具的刀具标识号进行缓存,并在删除刀座-刀具映射表中目标刀座当前对应的刀具标识号,在换刀机构上升至换刀机构原位后,在将缓存的目标刀具的刀具标识号写入刀座-刀具映射表中目标刀座对应的刀具标识号。
13、在一些实施例中,所述刀库为圆盘式刀库,通过控制刀库的转动方向及转动速度来定位刀座。
14、在一些实施例中,在接收到目标刀具标识号后,检测当前目标刀具标识号是否有效,若检测结果为是,则执行步骤(11)。
15、在一些实施例中,机器人及刀库基于放刀指令执行如下操作:
16、(21)机器人放刀指令检测当前是否处于空闲状态,若检测结果为是,则机器人控制末端的电主轴夹头运行至换刀位置1,若检测结果为否,则在当前任务执行完毕后,机器人控制末端运行至换刀位置1;
17、(22)刀库基于放刀指令检测当前处于换刀位置2的刀座是否空,若检测结果为否,则控制一个空刀座转动至换刀位置2;
18、(23)控制换刀位置2处的刀座执行倒刀动作;
19、(24)换刀机构处于换刀机构原位,取刀机构处于取刀机构原位,控制取刀机构伸至工作位,同时控制机器人末端的电主轴夹头松开当前刀具;
20、(25)换刀机构下降至低位,将当前刀具转送至换刀位置2,换刀机构上升至换刀机构原位后,取刀机构缩回取刀机构原位;
21、(26)控制换刀位置2处的刀座执行回刀操作,完成放刀操作。
22、在一些实施例中,在换刀机构下降至低位时,将机器人末端刀具的标识号进行缓存,并删除刀座-刀具映射表中当前对应的刀具标识号,在换刀机构上升至换刀机构原位后,将换刀位置2处刀座对应的刀具标识号由空更新为缓存的机器人末端刀具的标识号。
23、在一些实施例中,刀库基于退刀指令执行如下步骤:
24、(31)查找退刀指令中目标刀具标识号所在的目标刀座,此时的目标刀具为破损或磨损刀具;
25、(32)控制刀仓转动,直至目标刀座处于换刀位置2后停止;
26、(33)控制目标刀座倒刀;
27、(34)换刀机构处于换刀机构原位,取刀机构处于取刀机构原位,取刀机构伸至工作位;
28、(35)换刀机构下降至低位,换刀机构上升至换刀机构原位,取刀机构缩回取刀机构原位,目标刀座回刀,完成退刀操作;
29、在完成退刀操作后,操作人员将破损或磨损的刀具取出。
30、在一些实施例中,目标刀座的确定方法具体如下:
31、基于刀座-刀具映射表来查找目标刀具标识号对应的刀座标识号,即为目标刀座;
32、在换刀机构开始下降时,在刀座-刀具映射表中删除目标刀座对应的刀具标识号,刀具标识号为空。
33、在一些实施例中,在操作人员将待装入刀库的刀具放置在换刀位置2对应侧的取刀机构上时,刀库基于装刀指令实行如下步骤:
34、(41)基于装刀指令检测处于换刀位置2的刀座是否为空;
35、(42)若检测结果为否,则控制一个空刀座转动至换刀位置2,执行步骤(43),所检测结果为是,则直接执行步骤(43);
36、(43)控制换刀位置2的刀座执行倒刀操作;
37、(44)换刀机构处于换刀机构原位,取刀机构处于取刀机构原位,取刀机构伸至工作位;
38、(45)换刀机构下降至低位,换刀机构上升至换刀机构原位,取刀机构缩回取刀机构原位,目标刀座执行回刀操作,完成装刀操作。
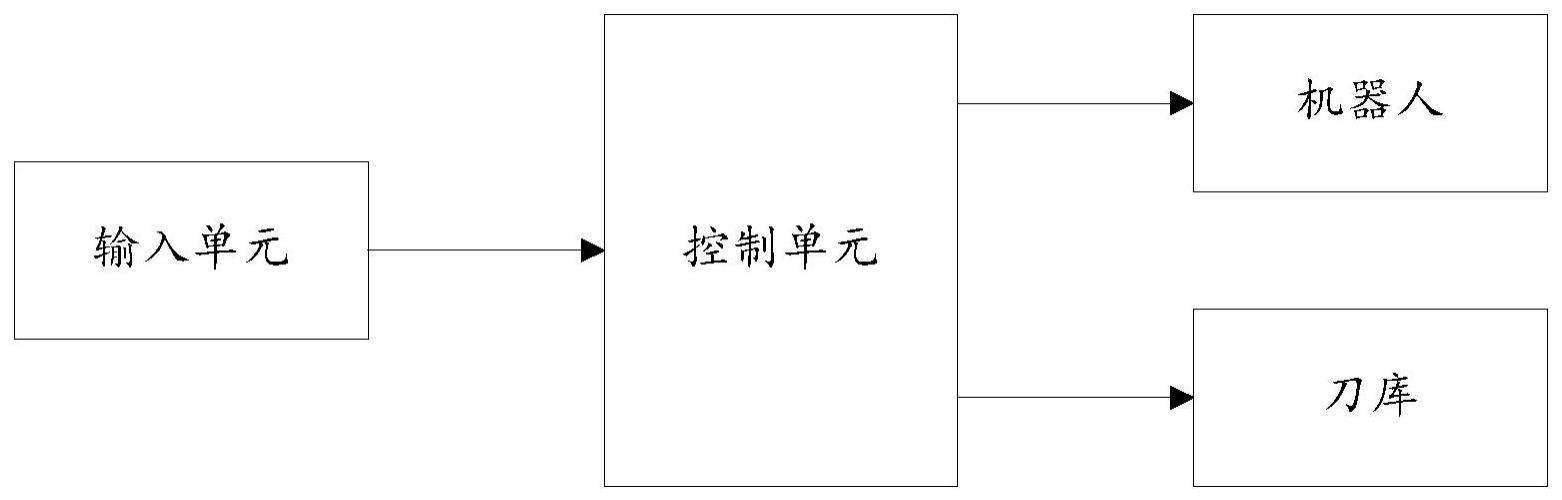
39、另一方面,本申请实施例提供了一种基于刀库的机器人换刀控制系统,所述系统包括:
40、刀库、机器人,及与刀库与机器人通讯连接的控制单元、及与控制单元连接输入单元;
41、输入单元用于输入取刀指令、放刀指令、退刀指令及装刀指令,并件输入的指令发送至控制单元;
42、控制单元基于上述基于刀库的机器人换刀控制方法来控制刀库和机器人执行取刀操作;
43、基于上述基于刀库的机器人换刀控制方法来控制刀库和机器人执行放刀操作;
44、基于上述基于刀库的机器人换刀控制方法来控制刀库执行退刀操作;
45、基于上述基于刀库的机器人换刀控制方法来控制刀库执行装刀操作。
46、本发明通过软件的开发不仅即实现了基于已有刀库的机器人取刀操作和放刀操作,还实现了刀库的装刀操作与退刀操作,在无需增加新的硬件的情况下,提高汽车白车身铝型材零部件或者铸铝件的加工效率。
技术特征:
1.一种基于刀库的机器人换刀控制方法,其特征在于,机器人及刀库分别基于取刀指令执行如下操作:
2.如权利要求1所述基于刀库的机器人换刀控制方法,其特征在于,目标刀座的确定方法具体如下:
3.如权利要求1所述基于刀库的机器人换刀控制方法,其特征在于,所述刀库为圆盘式刀库,通过控制刀库的转动方向及转动速度来定位刀座。
4.如权利要求1所述基于刀库的机器人换刀控制方法,其特征在于,在接收到目标刀具标识号后,检测当前目标刀具标识号是否有效,若检测结果为是,则执行步骤(11)。
5.如权利要求1所述基于刀库的机器人换刀控制方法,其特征在于,机器人及刀库基于放刀指令执行如下操作:
6.如权利要求5所述基于刀库的机器人换刀控制方法,其特征在于,在换刀机构下降至低位时,将机器人末端刀具的标识号进行缓存,并删除刀座-刀具映射表中当前对应的刀具标识号,在换刀机构上升至换刀机构原位后,将换刀位置2处刀座对应的刀具标识号由空更新为缓存的机器人末端刀具的标识号。
7.如权利要求1所述基于刀库的机器人换刀控制方法,其特征在于,刀库基于退刀指令执行如下步骤:
8.如权利要求7所述基于刀库的机器人换刀控制方法,其特征在于,目标刀座的确定方法具体如下:
9.如权利要求1所述基于刀库的机器人换刀控制方法,其特征在于,在操作人员将待装入刀库的刀具放置在换刀位置2对应侧的取刀机构上时,刀库基于装刀指令实行如下步骤:
10.一种基于刀库的机器人换刀控制系统,其特征在于,所述系统包括:
技术总结
本发明提供了一种基于刀库的机器人换刀控制方法,基于取刀指令执行如下操作:机器人控制末端运行至换刀位置1;刀库基于取刀指令控制目标刀具所在的刀座运行至换刀位置2,控制目标刀座执行倒刀动作;换刀机构处于原位,换刀机构两端的取刀机构处于原位,控制取刀机构伸至工作位,控制机器人末端的电主轴夹头松开当前刀具;换刀机构下降至低位,将目标刀具传送至换刀位置1的同时将当前刀具转送至换刀位置2,换刀机构上升至原位后,控制机器人末端的电主轴夹头夹紧,取刀机构缩回原位;控制目标刀座回刀完成取刀操作。通过软件的开发实现了基于已有刀库的机器人取刀操作和放刀操作,提高汽车白车身铝型材零部件或者铸铝件的加工效率。
技术研发人员:吴朋辉,温强龙,张飞,佘雯,齐伟
受保护的技术使用者:安徽必达新能源汽车产业研究院有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!