一种钢板坡口切割打磨工作站的制作方法
本发明涉及钢板加工,具体而言,涉及一种钢板坡口切割打磨工作站。
背景技术:
1、钢板在焊接之前需要加工焊接坡口,焊接坡口加工分为切割和打磨两道工序,切割一般采用等离子割炬切割,打磨采用打磨工具完成,机器人切坡口就是用将等离子割炬安装在机器人上,机器人移动等离子割炬完成钢板坡口切割,机器人打磨坡口就是将打磨工具安装在机器人上,机器人移动打磨工具完成钢板坡口打磨。
2、目前,钢板坡口加工是先在坡口切割工作站完成坡口切割,然后在坡口打磨工作站进行坡口打磨,涉及到钢板的多次搬运,搬运次数多、整体节奏慢、设备成本高、占地面积大;现有技术完成钢板的搬运和打磨需要用两台机器人,成本更高;现有技术完成钢板的切割和打磨需要再不同的工作台完成,成本更高、占地面积更大。
技术实现思路
1、本发明旨在提供一种钢板坡口切割打磨工作站,以解决现有技术中的钢板搬运次数多、加工节奏慢、成本高和占地面积大的问题。
2、本发明的实施例是这样实现的:
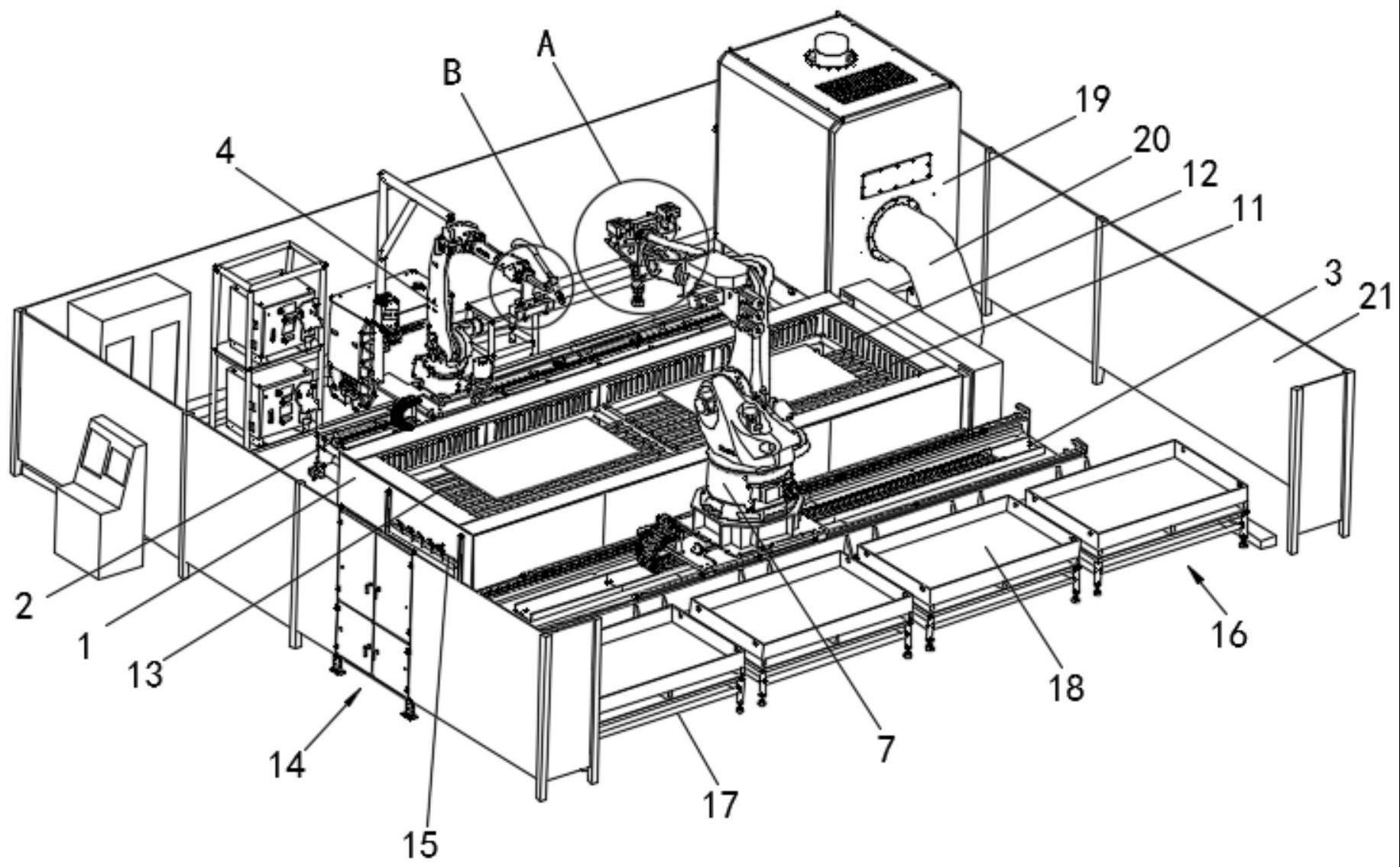
3、本发明实施例提供一种钢板坡口切割打磨工作站,其包括切割打磨台;
4、上述切割打磨台的两侧分别设有切割机器人地轨和打磨机器人地轨,上述切割打磨台、上述切割机器人地轨和上述打磨机器人地轨相互平行且间隔布置;
5、上述切割机器人地轨上滑动连接有六轴切割机器人,上述六轴切割机器人的末端设有割炬,上述割炬可拆卸的固定连接在上述六轴切割机器人的末端上;
6、上述六轴切割机器人末端的侧边设有第一3d视觉传感器,上述第一3d视觉传感器固定连接于上述六轴切割机器人的末端;
7、上述打磨机器人地轨上滑动连接有六轴打磨机器人,上述六轴打磨机器人的末端固定连接有打磨工具、磁吸工具和第二3d视觉传感器。
8、本实施方案公开的一种钢板坡口切割打磨工作站,通过合理的布局,将上述打磨机器人和上述六轴切割机器人集成在了同一个工作站内,同时实现了钢板的坡口切割和坡口打磨功能;上述打磨工具、上述磁吸工具及第二3d视觉传感器集成在上述六轴打磨机器人的末端,一台机器人同时实现了钢板的自动上下料和钢板坡口打磨,进而使得一种钢板坡口切割打磨工作站具有既满足了钢板坡口加工的要求,降低了成本,减少了厂房占用面积和具有良好的经济性的有益效果。
9、可选地:上述割炬位于上述六轴切割机器人末端的中间位置,上述第一3d视觉传感器位于上述六轴切割机器人末端的侧边位置。
10、如此设置,上述割炬的设置能够用于进行钢板坡口切割,上述第一3d视觉传感器能够对钢板位置的精确识别,便于上述割炬对钢板精确切割。
11、可选地:上述打磨工具位于上述六轴打磨机器人末端的下侧位置,上述磁吸工具位于上述六轴打磨机器人末端上侧位置,上述第二3d视觉传感器位于上述磁吸工具的中间位置。
12、如此设置,上述打磨工具位于上述六轴打磨机器人末端的下侧位置,具有轴向和径向浮动功能,用于进行钢板坡口打磨,上述磁吸工具位于上述六轴打磨机器人末端上侧位置,通过磁吸工具便能够抓取钢板,实现的了钢板的加工前后的运输,上述第二3d视觉传感器位于上述磁吸工具的中间位置,上述第二3d视觉传感器能够对钢板位置进行精确识别,从而便于引导上述磁吸工具进行抓取。
13、可选地:上述切割打磨台为内凹式构件,上述切割打磨台的内部具有吸风通道,上述切割打磨台的内侧壁开设有若干吸风口,上述吸风通道与若干上述吸风口相互贯通。
14、如此设置,上述吸风通道与若干上述吸风口相互贯通,有利于吸取切割和打磨过程中的烟尘,降低了工作站空气中额粉尘,使得工作站环境较为整洁。
15、可选地:上述切割打磨台的内底面具有支撑框架,上述支撑框架沿上述切割打磨台的纵向分布。
16、如此设置,上述支撑框架能够有效的对钢板进行支撑,同时不影响对钢板的切割和打磨工作。
17、可选地:上述打磨机器人地轨的一端设有打磨头快换柜,上述打磨头快换柜设有多层打磨头放置架。
18、如此设置,上述打磨头快换柜上的多层上述打磨头放置架能够放置多个打磨头,有利于上述六轴打磨机器人实现快速更换打磨头的作用,有效的提高了工作效率。
19、可选地:上述打磨机器人地轨的外侧面设有若干上料台,若干上述上料台的下部具有支架,上述支架的顶面均放置有料框。
20、如此设置,上述支架能够有效的支撑上部的上述料框,上述料框的设置便于叉车移动上述料框,当上述料框内装满钢板,通过叉车将上述料框移动到上述支架上,进而便于上述六轴打磨机器人取料。
21、可选地:上述切割机器人地轨固定安装在地面上,上述打磨机器人地轨固定安装在地面上。
22、如此设置,有利于上述六轴切割机器人和上述六轴打磨机器人分别稳固的滑动在上述切割机器人地轨和上述打磨机器人地轨上,加工的安全性得到了提高。
23、可选地:上述切割打磨台的一端设有除尘装置,上述除尘装置连接有吸管,上述吸管一端连通上述除尘装置,上述吸管的另一端连通上述吸风通道。
24、如此设置,上述除尘装置能够有效的吸取切割和打磨过程中的烟尘,集中收集,集中处理,使得工作站的环境得到美化。
25、可选地:上述工作站的外周围设有围栏。
26、如此设置,上述围栏能够有效阻隔切割打磨过程中的弧光,同时,有利于非工作人员的进入,避免不必要的安全事故发生。
27、综合以上描述,本发明公开的一种钢板坡口切割打磨工作站具有既满足了钢板坡口加工的要求,降低了成本,减少了厂房占用面积和具有良好的经济性的有益效果。
技术特征:
1.一种钢板坡口切割打磨工作站,其特征在于:
2.根据权利要求1所述的一种钢板坡口切割打磨工作站,其特征在于:
3.根据权利要求1所述的一种钢板坡口切割打磨工作站,其特征在于:
4.根据权利要求1所述的一种钢板坡口切割打磨工作站,其特征在于:
5.根据权利要求4所述的一种钢板坡口切割打磨工作站,其特征在于:
6.根据权利要求1所述的一种钢板坡口切割打磨工作站,其特征在于:
7.根据权利要求1所述的一种钢板坡口切割打磨工作站,其特征在于:
8.根据权利要求1所述的一种钢板坡口切割打磨工作站,其特征在于:
9.根据权利要求4所述的一种钢板坡口切割打磨工作站,其特征在于:
10.根据权利要求1所述的一种钢板坡口切割打磨工作站,其特征在于:
技术总结
本发明涉及钢板加工技术领域,旨在解决现有技术中钢板搬运次数多、加工节奏慢、成本高和占地面积大的问题,提供一种钢板坡口切割打磨工作站,包括切割打磨台;切割打磨台两侧分别设有切割机器人地轨和打磨机器人地轨,切割打磨台、切割机器人地轨和打磨机器人地轨相互平行且间隔布置;切割机器人地轨上滑动连接有六轴切割机器人,六轴切割机器人末端固定连接割炬;六轴切割机器人末端的侧边固定连接有第一3D视觉传感器;打磨机器人地轨上滑动连接有六轴打磨机器人,六轴打磨机器人的末端固定连接有打磨工具、磁吸工具和第二3D视觉传感器。本发明的有益效果是既满足了钢板坡口加工的要求,降低了成本,减少了厂房占用面积和具有良好的经济性。
技术研发人员:董斌,邵奇,张瑜,崔欣
受保护的技术使用者:陕西戴伯特智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!