一种建筑施工智能机器人的制作方法
本发明涉及建筑施工工程,具体涉及一种切割机构及建筑施工智能机器人。
背景技术:
1、在建筑施工过程中,钢筋是经常会被使用到的一种材料,用于增强板、梁、柱等结构的抗拉强度。通常情况下,厂家出厂的钢筋多为盘式或单根长度固定的捆式,但在现场施工中,不同部位、不同结构需要钢筋的长度有所不同,因此在施工现场需要对钢筋进行切断。
2、钢筋在建设过程中的大量采用,促生了多种多样的钢筋切断设备出现在了施工现场,但是现有钢筋加工设备的钢筋切断多为人工控制或者依靠电气设备进行,人员的长时间疲劳作业或者电气设备的故障率高等因素,导致钢筋加工精度不足、可靠性低,随着工业社会的快速发展,具有钢筋切断功能的建筑施工机器人逐步产生,例如中国专利文献cn208019335u公开了一种全自动分段导入式建筑施工智能机器人,其由钢筋摆放架、进料平台、剪切设备、动力输出设备、切割设备和控制台组成,其钢筋切割是人工操作控制台上的按钮,通过电气传输将对应长度阻拦器下降,当钢筋触碰到钢筋阻拦器后,人工通过按动切割装置的启动按钮完成切割,虽然现有技术克服了人员长时间疲劳作业导致的钢筋加工精度不足的问题,但是,一旦控制台操作长度阻拦器的电气元件误动作,非预定长度的阻拦器下落,会导致钢筋切割精度不足,切割可靠性低。此外,该现有技术中采用了多个长度阻拦器,当需要切割不同长度钢筋时,对应长度的长度阻拦器移动至特定位置,下落阻拦钢筋进而实现不同长度的切割,多个长度阻拦器增加了设备的结构部件数量,导致结构复杂。
技术实现思路
1、因此,本发明要解决的技术问题在于克服现有技术中的建筑施工智能机器人的钢筋切割精度不足、可靠性低、结构复杂的缺陷,从而提供一种钢筋切割可靠性高、结构简单的建筑施工智能机器人。
2、本发明第一方面提供一种建筑施工智能机器人,包括:
3、移动底座;
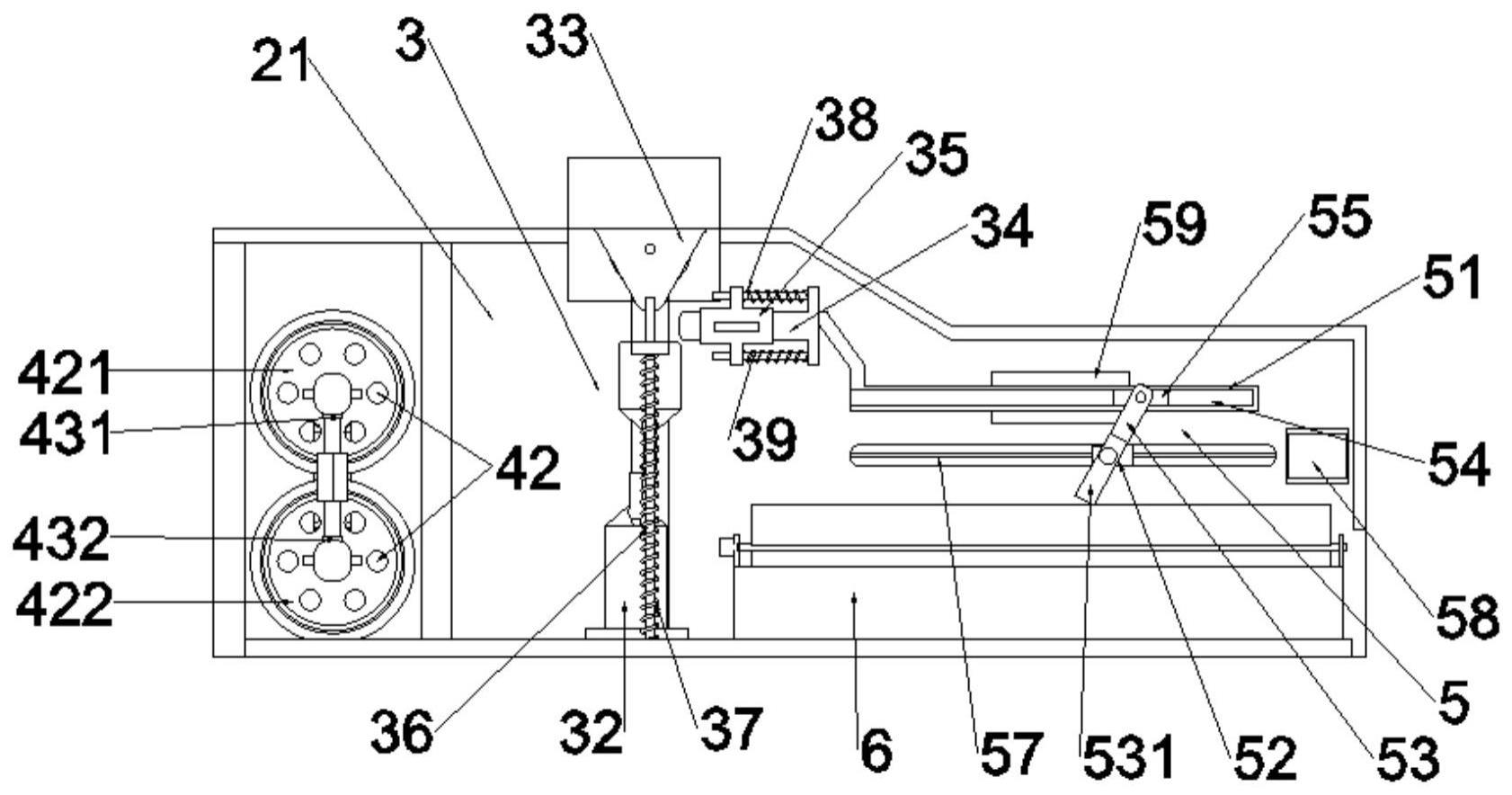
4、至少一个切割箱,转动连接于所述移动底座的上端,所述切割箱包括箱体,所述箱体内部安装有送料机构,所述送料机构的一侧安装有切割机构,通过所述送料机构可将待切割的钢筋向所述切割机构内输送,所述切割机构远离所述送料机构的一侧安装有切割长度调节机构,所述切割长度调节机构被设置为可靠近或远离所述送料机构,且能够被输送中的待切割的所述钢筋触及并推动,进而通过自身的运动触发所述切割机构切割所述钢筋。
5、可选地,所述切割机构包括:
6、第一切割件,可往复滑动地连接在箱体内;
7、第二切割件,设于所述第一切割件滑动轨迹的终止端的下方,所述第二切割件固定连接在所述箱体内,所述第二切割件与所述第一切割件配合切割所述钢筋;
8、施力凸轮,位于所述第一切割件滑动轨迹起始端的上方且与所述第一切割件间隔设置,所述施力凸轮在驱动机构的作用下做旋转运动;
9、活动垫块,可往复滑动地设置在所述施力凸轮与所述第一切割件之间,所述活动垫块靠近所述切割长度调节机构的一侧设有可被所述切割长度调节机构运动触发进而移动的可触发部,所述活动垫块的滑动路径与所述第一切割件的滑动路径垂直设置;
10、当所述第一切割件位于其滑动轨迹起始端时,所述钢筋输送中通过所述切割长度调节机构触发所述活动垫块的可触发部并推动所述活动垫块向靠近所述切割机构方向滑动,进而进入所述施力凸轮与所述第一切割件之间的间隙中,所述施力凸轮通过所述活动垫块将力传导至所述第一切割件后,推动所述第一切割件进入其滑动轨迹终止端以完成所述钢筋的切割。
11、可选地,所述活动垫块外部安装有固定框,所述活动垫块可在所述固定框的空腔内往复滑动,所述活动垫块与所述固定框之间还安装有复位弹簧,用于所述切割机构完成切割后所述活动垫块从所述施力凸轮与所述第一切割件之间的间隙向远离所述切割机构一侧移动回到初始位置。
12、可选地,所述切割长度调节机构包括:
13、推动杆,可往复滑动地连接在箱体内,所述推动杆靠近所述切割机构的一端设有可移动触发所述切割机构进行切割动作的触发结构;
14、连接块,可往复滑动地连接在所述箱体内,所述连接块具有第一固定状态和第一活动状态;
15、活动杆,连接于所述推动杆与所述连接块之间,所述活动杆的第一端与所述推动杆转动连接,第二端与所述连接块转动连接,所述第二端具有向所述送料结构的输送路径延伸以被输送中的待切割的所述钢筋触及并推动的被触发部;
16、在所述连接块处于所述第一固定状态时,钢筋在被输送中触发并推动所述被触发部,所述活动杆相对所述连接块转动并推动所述推动杆向靠近所述切割机构方向滑动,所述推动杆通过所述触发结构触发所述切割机构切割所述钢筋;
17、在所述连接块处于所述第一活动状态时,所述连接块可以带动活动杆进行移动使得被触发部做相对靠近或远离切割机构的运动,从而调节所述钢筋的被切割长度。
18、可选地,所述推动杆的外壁上开设有调节槽,所述调节槽内安装有致动块,所述致动块具有与所述调节槽固定的第二固定状态和可相对所述调节槽滑动的第二活动状态,所述活动杆的所述第一端与所述致动块直接转动连接。
19、可选地,所述致动块为通电的电磁铁块,当所述电磁铁块通电时所述电磁铁块处于所述第二固定状态或所述第二活动状态,当所述电磁铁块关闭通电时所述电磁铁块处于所述第二活动状态或所述第二固定状态。
20、可选地,还包括在所述箱体内壁上开设的矩形窗口,所述矩形窗口内转动连接有第二螺纹杆,所述第二螺纹杆的一端固定连接有控制电机,所述连接块与所述第二螺纹杆螺纹连接,所述控制电机用于控制所述连接块沿所述第二螺纹杆滑动;
21、开启所述控制电机的同时将所述电磁铁块调节至所述第二活动状态,带动所述连接块向靠近或远离所述切割机构方向滑动,所述连接块滑动时带动所述电磁铁块一起移动,通过此种可调节所述活动杆距离所述切割机构的距离,进而改变钢筋的切割长度。
22、可选地,所述箱体内部对称固定连接有支撑架,所述推动杆与所述支撑架滑动连接。
23、可选地,所述移动底座的外壁上对称安装有两条履带轮,所述移动底座的上端固定连接有承载板,所述承载板的内部安装有角度调节电机,所述承载板的上方安装有连接盘,至少一个所述切割箱均安装在连接盘的上端,所述连接盘与角度调节电机连接。
24、可选地,所述送料机构包括两个输送轮,两个所述输送轮均与所述箱体转动连接,所述箱体的侧壁上开设有送料口,通过送料口可将钢筋插入到两个所述输送轮之间,所述箱体的外壁上安装有动力结构,通过动力结构可带动输送轮转动;两个所述输送轮的中部均设有转轴,所述箱体的外壁上开设有限位窗口,所述限位窗口的内部的输送轮上均连接有两个调节块,两个所述调节块之间通过调节件连接,所述调节件可调节两个调节块之间的距离。
25、本发明技术方案,具有如下优点:
26、1.本发明提供的建筑施工智能机器人,包括移动底座,移动底座上设置切割箱,箱体内部安装有送料结构,切割机构和切割长度调节机构,通过送料机构将钢筋送入切割机构并触动位于切割机构远离送料机构一侧的切割长度调节机构,进而触发切割机构完成钢筋的切割。此种方法采用切割长度调节机构触发切割机构控制切割,确保了到达设定的长度才能完成切割动作,保证了切割精度的准确性。
27、2.本发明提供的建筑施工智能机器人,切割长度调节机构采用与连接块转动连接的活动杆的被触发部被触发后,带动推动杆向靠近切割机构进行移动,此种方法采用机械方式进行传力,相对电器元件控制和传导的不稳定,保证了传递的可靠性。
28、3.本发明提供的建筑施工智能机器人,活动杆的一端安装有在推动杆滑槽内的致动块上,通过致动块固定状态和活动状态的转换可配合活动杆进行移动,从而实现钢筋长度调节,此种调节结构形式简单,调节方便。
29、4.本发明提供的建筑施工智能机器人,致动块采用通电的电磁铁块,通过电源的切换从而实现致动块的活动状态和固定状态的切换,实现了致动块的电动控制。
30、5.本发明提供的建筑施工智能机器人,箱体内壁上开设的矩形窗口,矩形窗口内转动连接有第二螺纹杆,第二螺纹杆的一端固定连接有控制电机,连接块与第二螺纹杆螺纹连接,控制电机用于控制连接块沿第二螺纹杆滑动;开启控制电机的同时将电磁铁块调节至第二活动状态,带动连接块向靠近或远离切割机构方向滑动,连接块滑动时带动电磁铁块一起移动,通过此种可调节活动杆距离切割机构的距离,进而改变钢筋的切割长度,通过控制电机控制活动杆一端在螺纹杆上移动,带动另一端电磁铁块滑动,从而实现了切割长度的电动调节,矩形窗口的设置可以方便操作人员对设备进行观察。
31、6.本发明提供的建筑施工智能机器人,箱体内部对称固定连接有支撑架,推动杆在支撑架内部滑动连接,可以保证推动杆定向移动。
32、7.本发明提供的建筑施工智能机器人,切割长度调节装置触碰到活动垫块后,推动活动垫块进入施力轮的旋转轨迹内,施力轮挤压第一切割件,使其向下运动,第一切割件与第二切割件配合完成钢筋的切割,避免了由于钢筋下料长度未达到预设要求导致的切割精度不足的缺陷从而保证了切割的精度和可靠性。
33、8.本发明提供的建筑施工智能机器人,在活动垫块外部设置有固定框,固定框与活动垫块还安装了复位弹簧,保证了活动垫块可以在预定轨迹内进行移动,同时在切割完成后,复位弹簧将活动垫块复位至起始点,脱离施力凸轮的旋转轨迹,避免了对钢筋的重复切割并保证再一次切割时推动杆可以触动到垫块进行再次切割传递。
34、9.本发明提供的建筑施工智能机器人,移动底座上安装有履带轮,同时上端安装承载板和角度调节电机,建筑施工智能机器人可通过履带进入各种施工场地,上端角度调节电机可以对连接盘进行旋转,带动切割箱进行旋转,可以旋转合适的方向进行钢筋的输送。
35、10.本发明提供的建筑施工智能机器人,箱体外壁上开有限位窗口,在限位窗口内部安装有调节块,操作人员可以通过限位窗口对调节块进行调节,进而完成输送轮的调节,可以满足各个规格(直径)的钢筋的输送,操作方便,功能实用。
- 还没有人留言评论。精彩留言会获得点赞!