一种五自由度混联机器人
本发明涉及机器人,尤其涉及一种五自由度混联机器人。
背景技术:
1、面向搅拌摩擦焊领域的加工制造多采用龙门式搅拌摩擦焊接设备,但其难以适用于复杂曲面结构。以两转一移三自由度并联机构为主机构的五自由度混联机器人具备高灵活性、高刚度和大工作空间等特点,为搅拌摩擦焊提供了良好的解决方案。
2、目前经典的应用两转一移三自由度并联机构的五自由度混联机器人如exechon(w02006054935),采用2upr-spr并联机构串接二自由度双摆头的方案,其中upr支链提供两个约束;ecospeed卧式五轴加工中心以3-prs构型的z3主轴头(us6431802)为主机构,串接二自由度的移动工作台实现五轴联动加工,其中z3主轴头每个支链均提供一个约束力;中国申请专利cn201910059217.2以2upu-sp两转一移并联机构串接二自由度双摆头构成,其中sp支链可以提供两个约束。上述五自由度混联机器人均以三支链构型的两转一移三自由度并联机构为主机构构建,被广泛用于各种轻载加工场合,如钻孔和铣削。相比于用四支链两转一移并联机构的,在刚度和承载能力上还存在不足。
3、采用四支链两转一移并联机构的五自由度混联机器人如tricept(us4732525)、trimule(cn201520494616.9),它们均由两转一移并联机构串接二自由度双摆头构成。tricept的并联机构由三条ups支链和一条up支链组成,up支链为动平台提供两移动一转动的约束且只有up支链参与动平台受力抵抗。trimule并联部分中ups支链位于后方,另外三条支链处于前部平面,其中两条支链可为upr、ups等构型,关于中间的up支链对称布置,这种构型的承力主要依靠前部平面上的支链。
4、此外,还有诸多研究单位和科研机构构型出多种五自由度混联机器人。但是以具有空间约束力系、高刚度、承力均衡的四支链两转一移并联机构为主体的五自由度混联机器人还相对较少。
技术实现思路
1、本发明的目的在于提出一种具有空间约束力系、高刚度、承力均衡的五自由度混联机器人。
2、为了实现上述目的,本发明采用了如下技术方案:
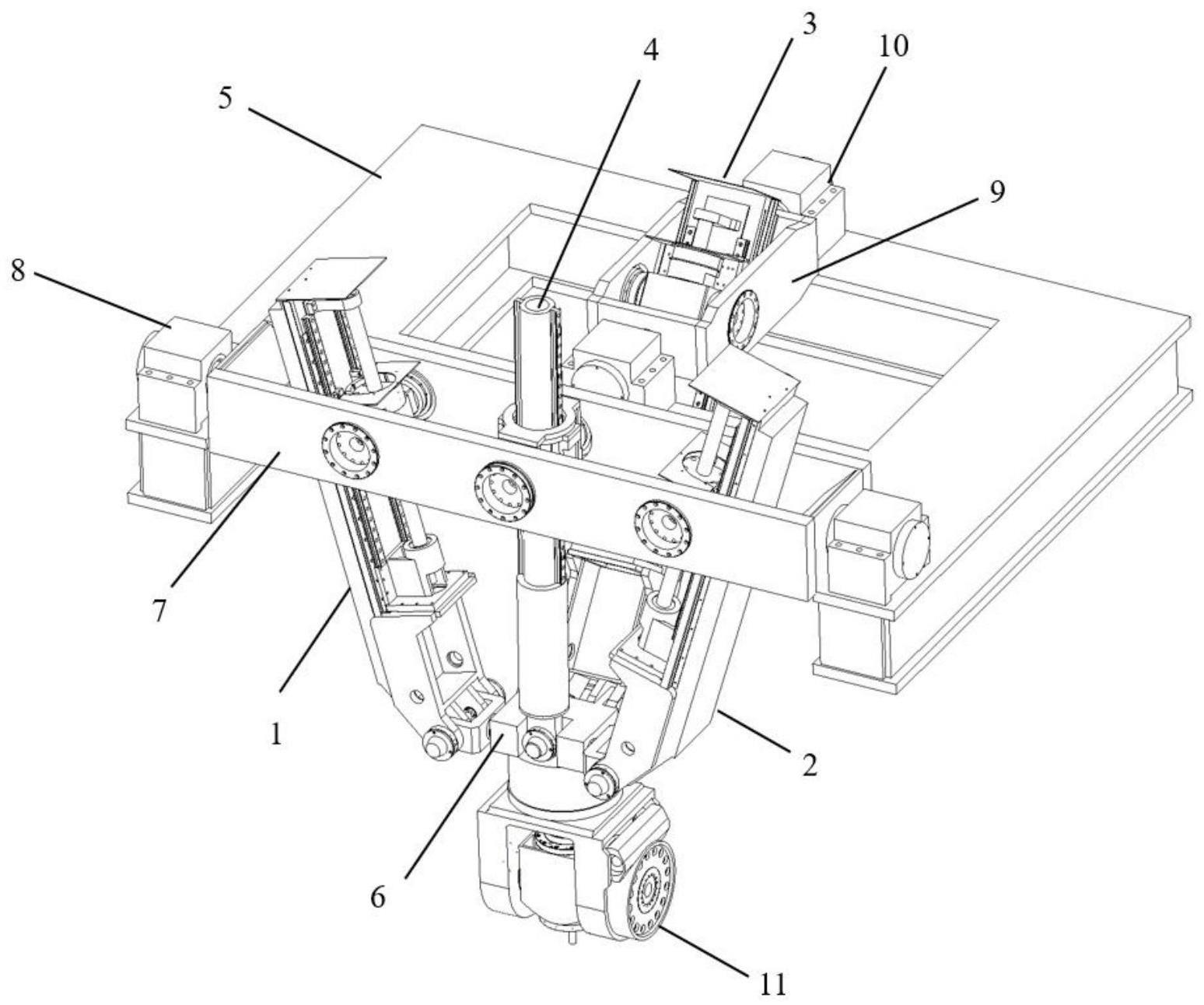
3、一种五自由度混联机器人,包括定平台,所述定平台上设置有轴线互相垂直的第一固定支座和第二固定支座,两第一固定支座之间转动连接有第一转动架,所述第一转动架上依次设置有第一运动支链、第四运动支链和第二运动支链,所述第一运动支链与第二运动支链的端部对称的铰接于动平台相对的两侧,所述第二固定支座上转动连接有第二转动架,所述第二转动架上设置有第三运动支链,第三运动支链、第四运动支链分别以互相垂直的转动副铰接于动平台的另外相对两侧;所述动平台底部设置有二自由度双摆头。
4、进一步的,所述第一运动支链与第二运动支链结构相同,并对称的设置于第四运动支链的两侧,第一运动支链、第二运动支链和第四运动支链共面,皆通过第一转动架与定平台转动相连,且与第一转动架形成的轴线彼此平行,第一运动支链、第二运动支链、第四运动支链与第一转动架形成的轴线垂直于第一转动架与第一固定支座形成的轴线;第一转动架与第一固定支座形成的轴线、第二转动架与第二固定支座形成的轴线互相垂直;第三运动支链通过第二转动架与定平台相连。
5、进一步的,第一运动支链、第二运动支链端部分别通过第一虎克铰、第二虎克铰对称连接于动平台相对的两侧,第三运动支链、第四运动支链端部分别转动连接于动平台另外相对的两侧;
6、第一虎克铰相连于动平台的轴线、第二虎克铰相连于动平台的轴线、第三运动支链前端相连于动平台的转动轴线与第四运动支链前端相连于动平台的转动轴线共面;第三运动支链与动平台连接的转动轴线垂直于第四运动支链与动平台连接的转动轴线;第一虎克铰相连于动平台的轴线和第二虎克铰相连于动平台的轴线重合,与第四运动支链前端相连于动平台的转动轴线垂直或重合。
7、更进一步的,所述第一运动支链包括第一支链底座,所述第一支链底座上设置有两条平行设置的第一导轨,所述第一导轨上滑动连接有第一滑块,第一滑块上固定连接有第一丝母组件,所述第一丝母组件与第一滚珠丝杠配合,所述第一滚珠丝杠一端通过第一联轴器与第一驱动电机连接,并与第一前端轴承配合,另一端与第一尾端轴承连接,所述第一驱动电机和第一尾端轴承均固定连接于第一支链底座上;所述第一丝母组件与第一支耳组件连接,第一支耳组件转动连接于第一转动架上;所述第一支链底座的端部设置有第一虎克铰,第一虎克铰通过第一u型件与动平台转动连接,第一虎克铰相连于第一运动支链的转轴平行于第一运动支链与第一转动架形成的转轴。
8、更进一步的,所述第四运动支链包括第四支链底座,所述第四支链底座上设置有两条平行设置的第四导轨,第四导轨上滑动连接有第四滑块,所述第四滑块设置有第四支耳组件,所述第四支耳组件转动连接于第一转动架上且通过第四轴承与第四滑块转动连接,并可相对于第四支链自身转动,所述第四支链底座的端部通过转动副与动平台转动连接,转动副轴线和第四支链与第一转动架形成的轴线平行或者垂直。
9、更进一步的,所述第三运动支链包括第三支链底座,所述第三支链底座上设置有两条平行设置的第三导轨,所述第三导轨上滑动连接有第三滑块,第三滑块上固定连接有第三丝母组件,所述第三丝母组件设置有第三支耳组件,所述第三支耳组件转动连接于第二转动架上且通过第三轴承与第三滑块转动连接,并可相对于第三支链自身转动,所述第三支链底座的端部通过转动副与动平台转动连接,其轴线共面垂直于第四运动支链与动平台连接的转动轴线。
10、进一步的,所述二自由度双摆头包括自上而下依次设置的第一摆动关节和第二摆动关节。
11、有益效果
12、相比于现有技术,本发明的有益效果在于:
13、本发明的并联部分中每条支链均提供一个约束,四条支链共同参与负载抵抗,承力更加均衡,因此本发明的五自由度混联机器人更易满足重载加工场合的需求。
14、本发明的并联部分是一种过约束机构,串接二自由度双摆头,整个系统具有高刚度、大转角、灵活度高、工作空间大等优点,可用于复杂零件的加工制造。
技术特征:
1.一种五自由度混联机器人,其特征在于,包括定平台,所述定平台上设置有轴线互相垂直的第一固定支座和第二固定支座,两第一固定支座之间转动连接有第一转动架,所述第一转动架上依次设置有第一运动支链、第四运动支链和第二运动支链,所述第一运动支链与第二运动支链的端部对称的铰接于动平台相对的两侧,所述第二固定支座上转动连接有第二转动架,所述第二转动架上设置有第三运动支链,第三运动支链、第四运动支链分别以互相垂直的转动副铰接于动平台的另外相对两侧;所述动平台底部设置有二自由度双摆头。
2.根据权利要求1所述的一种五自由度混联机器人,其特征在于,所述第一运动支链与第二运动支链结构相同,并对称的设置于第四运动支链的两侧,第一运动支链、第二运动支链和第四运动支链共面,皆通过第一转动架与定平台转动相连,且与第一转动架形成的轴线彼此平行,第一运动支链、第二运动支链、第四运动支链与第一转动架形成的轴线垂直于第一转动架与第一固定支座形成的轴线;第一转动架与第一固定支座形成的轴线、第二转动架与第二固定支座形成的轴线互相垂直;第三运动支链通过第二转动架与定平台相连。
3.根据权利要求1所述的一种五自由度混联机器人,其特征在于,第一运动支链、第二运动支链端部分别通过第一虎克铰、第二虎克铰对称连接于动平台相对的两侧,第三运动支链、第四运动支链端部分别转动连接于动平台另外相对的两侧;
4.根据权利要求1-3任意一项所述的一种五自由度混联机器人,其特征在于,所述第一运动支链包括第一支链底座,所述第一支链底座上设置有两条平行设置的第一导轨,所述第一导轨上滑动连接有第一滑块,第一滑块上固定连接有第一丝母组件,所述第一丝母组件与第一滚珠丝杠配合,所述第一滚珠丝杠一端通过第一联轴器与第一驱动电机连接,并与第一前端轴承配合,另一端与第一尾端轴承连接,所述第一驱动电机和第一尾端轴承均固定连接于第一支链底座上;所述第一丝母组件与第一支耳组件连接,第一支耳组件转动连接于第一转动架上;所述第一支链底座的端部设置有第一虎克铰,第一虎克铰通过第一u型件与动平台转动连接,第一虎克铰相连于第一运动支链的转轴平行于第一运动支链与第一转动架形成的转轴。
5.根据权利要求1-3任意一项所述的一种五自由度混联机器人,其特征在于,所述第四运动支链包括第四支链底座,所述第四支链底座上设置有两条平行设置的第四导轨,第四导轨上滑动连接有第四滑块,所述第四滑块设置有第四支耳组件,所述第四支耳组件转动连接于第一转动架上且通过第四轴承与第四滑块转动连接,并可相对于第四支链自身转动,所述第四支链底座的端部通过转动副与动平台转动连接,转动副轴线和第四支链与第一转动架形成的轴线平行或者垂直。
6.根据权利要求1-3任意一项所述的一种五自由度混联机器人,其特征在于,所述第三运动支链包括第三支链底座,所述第三支链底座上设置有两条平行设置的第三导轨,所述第三导轨上滑动连接有第三滑块,第三滑块上固定连接有第三丝母组件,所述第三丝母组件设置有第三支耳组件,所述第三支耳组件转动连接于第二转动架上且通过第三轴承与第三滑块转动连接,并可相对于第三支链自身转动,所述第三支链底座的端部通过转动副与动平台转动连接,其轴线共面垂直于第四运动支链与动平台连接的转动轴线。
7.根据权利要求1所述的一种五自由度混联机器人,其特征在于,所述二自由度双摆头包括自上而下依次设置的第一摆动关节和第二摆动关节。
技术总结
本发明公开了一种五自由度混联机器人,涉及机器人技术领域,包括定平台,定平台上设置有轴线互相垂直的第一固定支座和第二固定支座,两个第一固定支座之间转动连接有第一转动架,第一转动架上依次设置有第一运动支链、第四运动支链和第二运动支链,第一运动支链与第二运动支链的端部对称铰接于动平台相对的两侧,第二固定支座上转动连接有第二转动架,第二转动架上设置有第三运动支链,第三运动支链、第四运动支链分别以互相垂直的转动副铰接于动平台的另外相对两侧;动平台底部安装有二自由度双摆头。通过本发明的设置公开了一种具有高刚度、大转角、灵活度高、工作空间大等优点,可用于复杂零件的加工制造的五自由度混联机器人。
技术研发人员:岳义,张展魁,韦宝琛,李修广,廖忠骏
受保护的技术使用者:上海工程技术大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!