一种变位机构及弧形钢端板焊接装置的制作方法
本发明涉及弧形钢加工,尤其涉及一种变位机构及弧形钢端板焊接装置。
背景技术:
1、变位机设备是专用的焊接辅助设备,能够配合焊接机器人进行焊接作业,变位机设备主要适用于工件焊缝船型作业的焊接变位,以得到理想的加工位置和焊接速度。
2、我们可以知道,焊接机器人之所以能够完成焊接作业,是通过预编制的程序控制实现的,因此,焊接机器人对弧形钢与其之间的距离要求精度较高,一旦弧形钢焊接端与焊接机器人预设的焊接工位出现偏差,都会导致焊接机器人的焊接作业难以进行。目前所用变位机缺少对弧形钢进行定位的结构,难以与现有的焊接机器人配合实现弧形钢端板焊接作业,焊接效率低。
技术实现思路
1、本发明的目的之一在于提供一种变位机构,能够对弧形钢端部进行定位,使弧形钢端部与变位机构自身距离保持一致,便于配合焊接机构进行型钢端板焊接作业,提高焊接效率。
2、为达此目的,本发明采用以下技术方案:
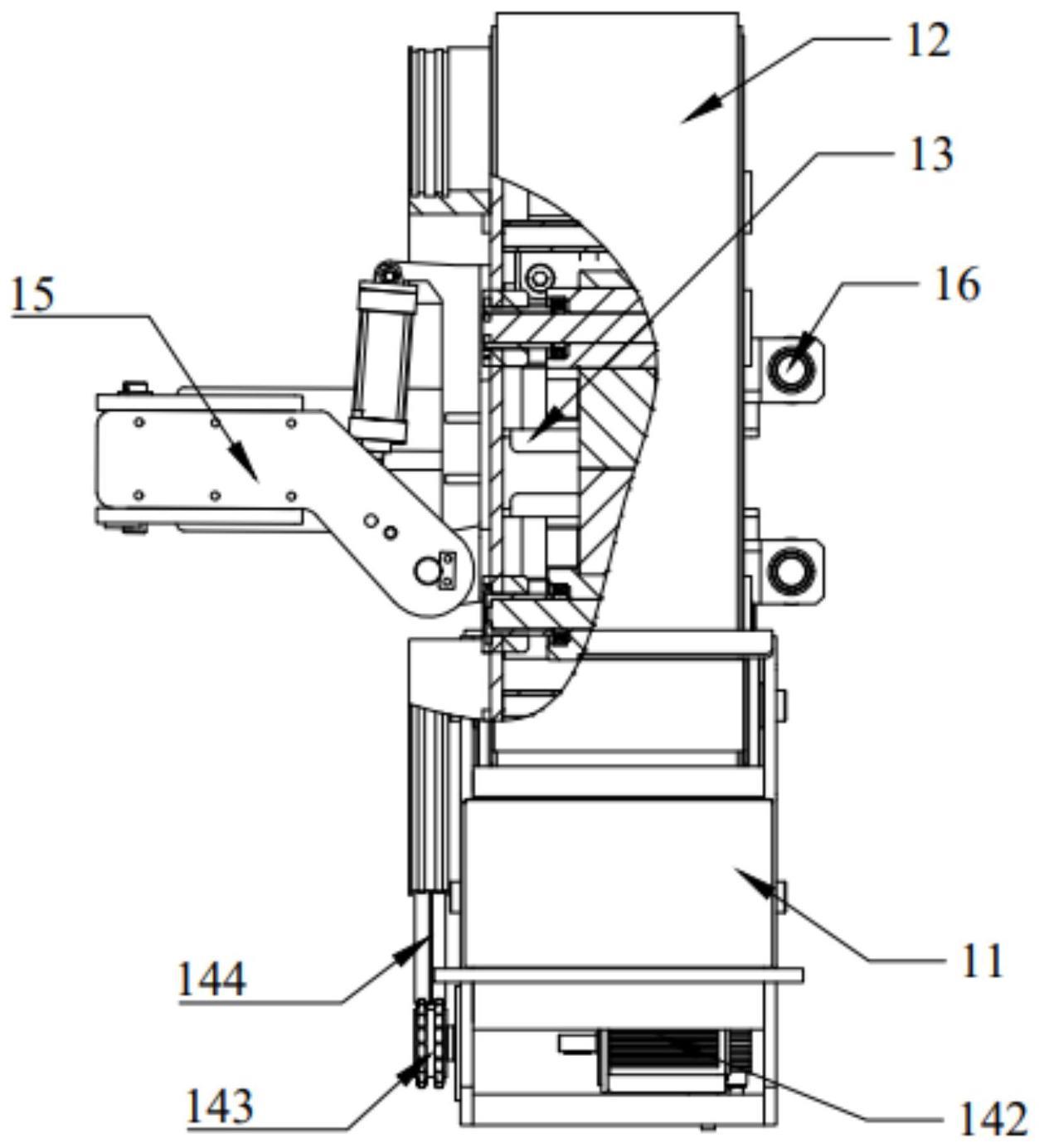
3、一种变位机构,包括底托、圆盘、旋转驱动组件、夹紧组件和定位组件,所述圆盘转动设置于所述底托上,所述圆盘上设置有开口槽,所述开口槽与所述圆盘的周向面连通;所述旋转驱动组件安装在所述底托上,被配置为驱动所述圆盘绕自身轴线旋转;所述夹紧组件安装在所述圆盘上,被配置为对中夹持弧形钢;所述定位组件安装在所述圆盘上,包括靠近所述开口槽以对所述弧形钢的端部进行定位的第一状态以及远离所述开口槽的第二状态。
4、作为优选,所述夹紧组件包括第一夹板、第二夹板和第一驱动件,所述第一夹板和所述第二夹板分别位于所述开口槽的两侧且与所述开口槽平行设置,所述第一驱动件被配置为驱动所述第一夹板和所述第二夹板做相互靠近或远离的运动。
5、作为优选,所述夹紧组件还包括主动齿轮、从动齿轮、第一连杆和第二连杆,所述主动齿轮、所述从动齿轮、所述第一连杆和所述第二连杆均与所述圆盘转动连接,所述主动齿轮与所述从动齿轮啮合连接,所述主动齿轮和所述第一连杆分别与所述第一夹板的第一端和第二端转动连接,所述第一夹板与所述主动齿轮偏心连接;所述从动齿轮和所述第二连杆分别与所述第二夹板的第一端和第二端转动连接,所述第二夹板与所述从动齿轮偏心连接,所述第一驱动件铰接于所述圆盘上,其输出端与所述第一连杆转动连接。
6、作为优选,所述夹紧组件还包括护板,所述第一夹板和所述第二夹板相对的一面均设置有所述护板,所述护板的第一端向远离另一个所述护板的方向折弯,所述护板的第二端向靠近另一个所述护板的方向折弯。
7、作为优选,所述定位组件设置于所述圆盘远离所述开口槽开口的一侧,所述定位组件包括动力臂、定位辊、抵接板以及第三驱动件,所述动力臂的第一端与所述圆盘铰接,所述动力臂的第二端与所述定位辊连接,所述定位辊能够绕自身轴线旋转,所述抵接板设置于所述动力臂面向所述开口槽的一侧且与所述开口槽垂直,所述定位辊和所述第三驱动件分别位于所述抵接板的两侧,所述第三驱动件的输出端与所述动力臂连接,被配置为驱动所述动力臂绕所述动力臂的第一端旋转。
8、作为优选,所述夹紧组件位于所述圆盘内部,该变位机构还包括设置于所述圆盘背向所述定位组件一侧的导向组件,所述导向组件包括与所述开口槽平行的两个导向辊,所述导向辊能够绕自身轴线旋转。
9、本发明的另一目的在于提供一种弧形钢端板焊接装置,包括行走底梁、行走小车、焊接机构以及如上述的变位机构,所述行走小车设置有两组,能够在所述行走底梁上移动,所述焊接机构和所述变位机构均设置有两组且分别两两对称的设置于两组所述行走小车上。
10、作为优选,还包括搬运机器人,所述搬运机器人设置有两组,分别与两组所述行走小车固接以随所述行走小车行走。
11、作为优选,所述搬运机器人包括机器人主体和抓取组件,所述抓取组件用于抓取端板,所述抓取组件与所述机器人主体柔性连接。
12、作为优选,所述行走小车包括小车主体、第四驱动件以及行走链轮,所述行走底梁上设置有与所述行走链轮配合的行走链条,所述第四驱动件的输出端与所述行走链轮连接,所述第四驱动件与所述小车主体柔性连接。
13、本发明的有益效果:本发明中的变位机构能够夹持型钢对型钢进行翻转,从不同角度对型钢进行焊接,而且通过定位组件的设置能够对型钢的端部进行定位,使型钢端部与变位机构自身的距离保持一致,当该定位机构配合焊接机构进行型钢端板焊接时,和定位机构一同移动的焊接机构与型钢端部的距离与预设距离相同,则焊接机构能够按照预设的程度对型钢端板进行焊接,完成焊接作业,提高了焊接效率。
技术特征:
1.一种变位机构,其特征在于,包括:
2.根据权利要求1所述的变位机构,其特征在于,所述夹紧组件(13)包括第一夹板(131)、第二夹板(132)和第一驱动件(133),所述第一夹板(131)和所述第二夹板(132)分别位于所述开口槽(121)的两侧且与所述开口槽(121)平行设置,所述第一驱动件(133)被配置为驱动所述第一夹板(131)和所述第二夹板(132)做相互靠近或远离的运动。
3.根据权利要求2所述的变位机构,其特征在于,所述夹紧组件(13)还包括主动齿轮(134)、从动齿轮(135)、第一连杆(136)和第二连杆(137),所述主动齿轮(134)、所述从动齿轮(135)、所述第一连杆(136)和所述第二连杆(137)均与所述圆盘(12)转动连接,所述主动齿轮(134)与所述从动齿轮(135)啮合连接,所述主动齿轮(134)和所述第一连杆(136)分别与所述第一夹板(131)的第一端和第二端转动连接,所述第一夹板(131)与所述主动齿轮(134)偏心连接;所述从动齿轮(135)和所述第二连杆(137)分别与所述第二夹板(132)的第一端和第二端转动连接,所述第二夹板(132)与所述从动齿轮(135)偏心连接,所述第一驱动件(133)转动设置于所述圆盘(12)上,其输出端与所述第一连杆(136)转动连接。
4.根据权利要求2所述的变位机构,其特征在于,所述夹紧组件(13)还包括护板(138),所述第一夹板(131)和所述第二夹板(132)相对的一面均设置有所述护板(138),所述护板(138)的第一端向远离另一个所述护板(138)的方向折弯,所述护板(138)的第二端向靠近另一个所述护板(138)的方向折弯。
5.根据权利要求1所述的变位机构,其特征在于,所述定位组件(15)设置于所述圆盘(12)远离所述开口槽(121)开口的一侧,所述定位组件(15)包括动力臂(151)、定位辊(153)、抵接板(152)以及第三驱动件(154),所述动力臂(151)的第一端与所述圆盘(12)铰接,所述动力臂(151)的第二端与所述定位辊(153)连接,所述定位辊(153)能够绕自身轴线旋转,所述抵接板(152)设置于所述动力臂(151)面向所述开口槽(121)的一侧且与所述开口槽(121)垂直,所述定位辊(153)和所述第三驱动件(154)分别位于所述抵接板(152)的两侧,所述第三驱动件(154)的输出端与所述动力臂(151)连接,被配置为驱动所述动力臂(151)绕所述动力臂(151)的第一端旋转。
6.根据权利要求1所述的变位机构,其特征在于,所述夹紧组件(13)位于所述圆盘(12)内部,该变位机构(10)还包括设置于所述圆盘(12)背向所述定位组件(15)一侧的导向组件(16),所述导向组件(16)包括与所述开口槽(121)平行的两个导向辊(161),所述导向辊(161)能够绕自身轴线旋转。
7.一种弧形钢端板焊接装置,其特征在于,包括行走底梁(50)、行走小车(40)、焊接机构(20)以及如权利要求1-6中任一所述变位机构,所述行走小车(40)设置有两组,能够在所述行走底梁(50)上移动,所述焊接机构(20)和所述变位机构(10)均设置有两组且分别两两对称的设置于两组所述行走小车(40)上。
8.根据权利要求7所述的弧形钢端板焊接装置,其特征在于,还包括搬运机器人(32),所述搬运机器人(32)设置有两组,分别与两组所述行走小车(40)固接以随所述行走小车(40)行走。
9.根据权利要求8所述的弧形钢端板焊接装置,其特征在于,所述搬运机器人(32)包括机器人主体(321)和抓取组件(322),所述抓取组件(322)用于抓取端板,所述抓取组件(322)与所述机器人主体(321)柔性连接。
10.根据权利要求7所述的弧形钢端板焊接装置,其特征在于,所述行走小车(40)包括小车主体(41)、第四驱动件(42)以及行走链轮(44),所述行走底梁(50)上设置有与所述行走链轮(44)配合的行走链条(53),所述第四驱动件(42)的输出端与所述行走链轮(44)连接,所述第四驱动件(42)与所述小车主体(41)柔性连接。
技术总结
本发明涉及弧形钢加工技术领域,尤其涉及一种变位机构以及弧形钢端板焊接装置,该变位机构包括底托、圆盘、旋转驱动组件、夹紧组件和定位组件,圆盘转动设置于底托上,圆盘上设置有开口槽,开口槽与圆盘的周向面连通;旋转驱动组件安装在底托上,被配置为驱动圆盘绕自身轴线旋转;夹紧组件安装在圆盘上,被配置为对中夹持弧形钢;定位组件安装在圆盘上,包括靠近开口槽以对弧形钢的端部进行定位的第一状态以及远离开口槽的第二状态。上述变位机构能够对弧形钢进行定位,配合焊接机构进行弧形钢端板焊接,提高了焊接效率。
技术研发人员:陈振东,请求不公布姓名
受保护的技术使用者:建科机械(天津)股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!