一种泳池清洁机器人加工装配装置的制作方法
本发明涉及机器人加工,尤其涉及一种泳池清洁机器人加工装配装置。
背景技术:
1、长久不使用的泳池或刚建造完成的泳池在使用前需对其内部杂草、污垢和垃圾进行清理,人工清理费时费力,因此设计出了一种泳池清洁机器人代替人工可以对泳池内部进行自清洁,而该种泳池清洁机器人在加工装配时,需要将其底座进行固定,再对零部件进行装配,而在装配过程中,就需要使用一种泳池清洁机器人加工装配装置;
2、现有的泳池清洁机器人加工装配装置在使用时可能会存在两个问题,其一是泳池机器人底座在固定后,不具备旋转功能,这就使得对加工装配装置的伸缩臂要求较高,要对方向可调节,提高了装配结构的设计成本,其次是泳池机器人底座的外形尺寸不同时,现有的固定结构只能在单向进行固定,该种固定方式可能不够稳定,导致固定时泳池清洁机器人底座可能会因受外力产生晃动,导致装配精度降低的情况出现,因此我们提出了一种泳池清洁机器人加工装配装置。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种泳池清洁机器人加工装配装置。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种泳池清洁机器人加工装配装置,包括:
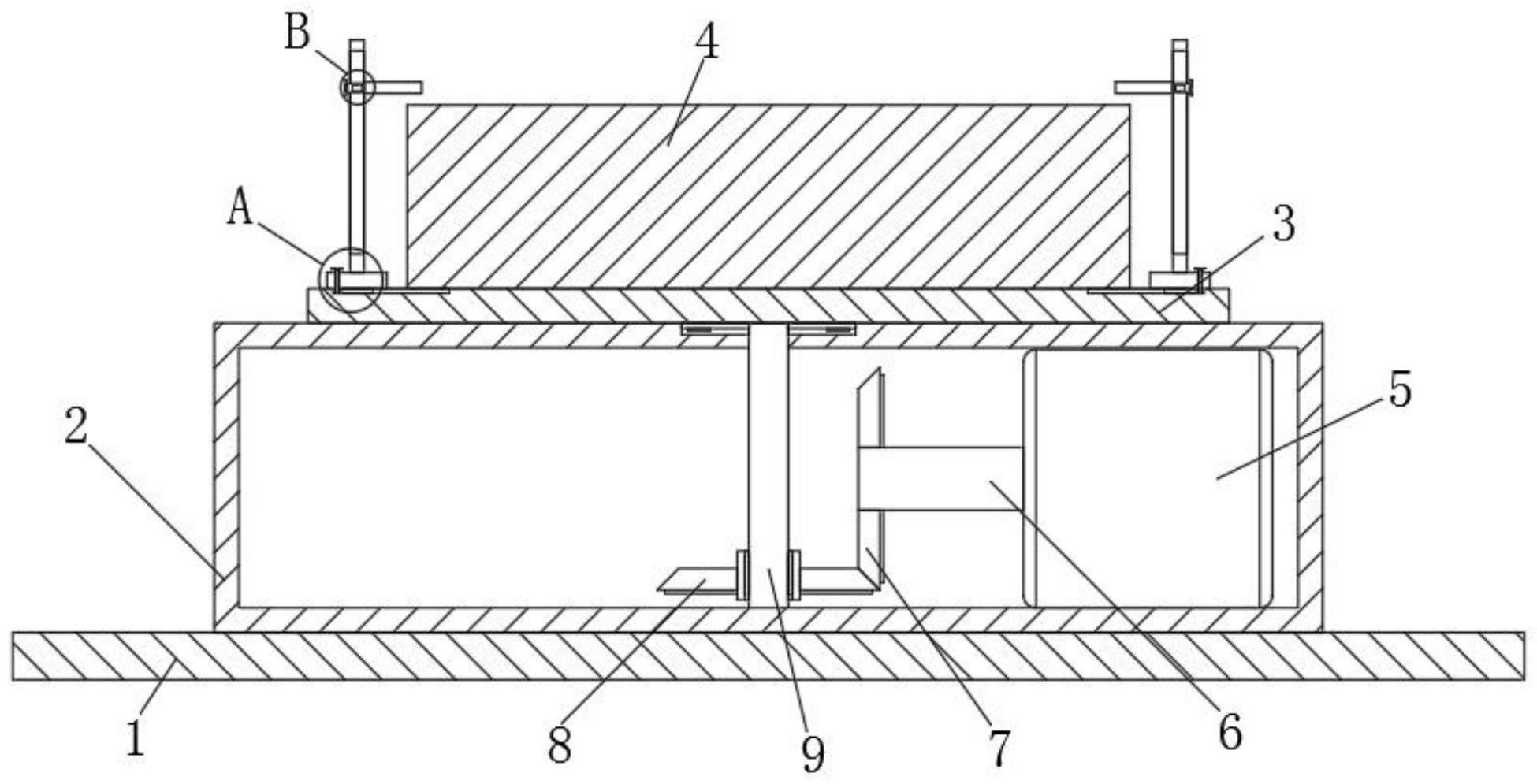
4、连接板,所述连接板的顶部固定安装有驱动框架,所述驱动框架的顶部设置有固定台,所述固定台的顶部中间处放置有泳池清洁机器人底座;
5、调节组件,所述调节组件安装在驱动框架和固定台上;
6、固定组件,所述固定组件安装在固定台上。
7、优选的,所述调节组件包括电机、主动轴、第一锥齿轮、第二锥齿轮、转轴和花键套,所述电机固定安装在驱动框架的底部内壁右侧,所述主动轴固定安装在电机的输出端,所述第一锥齿轮固定安装在主动轴的一端外侧,所述转轴转动安装在驱动框架的底部内壁中间处,所述转轴的一端与固定台固定连接,所述花键套设置在转轴的外侧,所述花键套固定安装在第二锥齿轮的内侧,所述第二锥齿轮与第一锥齿轮相啮合。
8、优选的,所述驱动框架的顶部中间处开设有安装孔,所述转轴通过法兰与固定台固定连接。
9、优选的,所述转轴的外下侧设置有外花键,所述花键套的内侧设置有内花键,内花键与外花键相啮合。
10、优选的,所述固定组件包括移动底座、锁紧件、立板、滑槽、连杆和固定板,所述移动底座滑动安装在固定台的顶部左右两侧,所述锁紧件设置在移动底座的顶部一侧,所述立板固定安装在移动底座的顶部中间处,所述滑槽开设在立板的一侧,所述连杆滑动安装在滑槽的内侧之间,所述固定板滑动安装在立板的一侧,所述连杆与固定板的一侧转动连接。
11、优选的,所述移动底座的底部设置有滑块,固定台的顶部左右两侧设置有导向槽,滑块滑动安装在导向槽的内侧。
12、优选的,所述锁紧件的一端与滑槽的底部相抵接,所述锁紧件的长度大于移动底座的高度。
13、优选的,所述连杆的外侧前后两侧中间段设置有嵌套,嵌套的侧视截面形状为四分之一圆环。
14、与现有技术相比,本发明的有益效果在于:
15、(1)本发明的一种泳池清洁机器人加工装配装置,通过设置的调节组件,使得该泳池清洁机器人加工装配装置可在固定后对泳池清洁机器人底座进行自适应旋转调节,这使其相对应的伸缩臂功能性要求降低,进而可降低装配结构的设计成本。
16、(2)本发明的一种泳池清洁机器人加工装配装置,通过设置的固定组件,使得该泳池清洁机器人加工装配装置可对泳池清洁机器人的侧边和顶部同时进行固定,固定方式相对较为稳定,避免了固定时泳池清洁机器人受力晃动,进而可使其装配精度提高。
技术特征:
1.一种泳池清洁机器人加工装配装置,其特征在于,包括:
2.根据权利要求1所述的一种泳池清洁机器人加工装配装置,其特征在于,所述调节组件包括电机(5)、主动轴(6)、第一锥齿轮(7)、第二锥齿轮(8)、转轴(9)和花键套(10),所述电机(5)固定安装在驱动框架(2)的底部内壁右侧,所述主动轴(6)固定安装在电机(5)的输出端,所述第一锥齿轮(7)固定安装在主动轴(6)的一端外侧,所述转轴(9)转动安装在驱动框架(2)的底部内壁中间处,所述转轴(9)的一端与固定台(3)固定连接,所述花键套(10)设置在转轴(9)的外侧,所述花键套(10)固定安装在第二锥齿轮(8)的内侧,所述第二锥齿轮(8)与第一锥齿轮(7)相啮合。
3.根据权利要求2所述的一种泳池清洁机器人加工装配装置,其特征在于,所述驱动框架(2)的顶部中间处开设有安装孔,所述转轴(9)通过法兰与固定台(3)固定连接。
4.根据权利要求3所述的一种泳池清洁机器人加工装配装置,其特征在于,所述转轴(9)的外下侧设置有外花键,所述花键套(10)的内侧设置有内花键,内花键与外花键相啮合。
5.根据权利要求1所述的一种泳池清洁机器人加工装配装置,其特征在于,所述固定组件包括移动底座(11)、锁紧件(12)、立板(13)、滑槽(14)、连杆(15)和固定板(16),所述移动底座(11)滑动安装在固定台(3)的顶部左右两侧,所述锁紧件(12)设置在移动底座(11)的顶部一侧,所述立板(13)固定安装在移动底座(11)的顶部中间处,所述滑槽(14)开设在立板(13)的一侧,所述连杆(15)滑动安装在滑槽(14)的内侧之间,所述固定板(16)滑动安装在立板(13)的一侧,所述连杆(15)与固定板(16)的一侧转动连接。
6.根据权利要求5所述的一种泳池清洁机器人加工装配装置,其特征在于,所述移动底座(11)的底部设置有滑块,固定台(3)的顶部左右两侧设置有导向槽,滑块滑动安装在导向槽的内侧。
7.根据权利要求6所述的一种泳池清洁机器人加工装配装置,其特征在于,所述锁紧件(12)的一端与滑槽(14)的底部相抵接,所述锁紧件(12)的长度大于移动底座(11)的高度。
8.根据权利要求7所述的一种泳池清洁机器人加工装配装置,其特征在于,所述连杆(15)的外侧前后两侧中间段设置有嵌套(17),嵌套(17)的侧视截面形状为四分之一圆环。
技术总结
本发明属于机器人加工领域,尤其是一种泳池清洁机器人加工装配装置,包括连接板,所述连接板的顶部固定安装有驱动框架,所述驱动框架的顶部设置有固定台,所述固定台的顶部中间处放置有泳池清洁机器人底座;调节组件,所述调节组件安装在驱动框架和固定台上;固定组件,所述固定组件安装在固定台上。本发明设计合理,可在固定后对泳池清洁机器人底座进行自适应旋转调节,这使其相对应的伸缩臂功能性要求降低,进而可降低装配结构的设计成本,且可对泳池清洁机器人的侧边和顶部同时进行固定,固定方式相对较为稳定,避免了固定时泳池清洁机器人受力晃动,进而可使其装配精度提高。
技术研发人员:张晓骏
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!