一种基于阻抗参数优化的球头自适应入位方法
本发明涉及一种球头入位技术,尤其是一种基于阻抗参数优化的球头自适应入位方法,主要用于飞机自动化装配中调姿定位器的球头入位。
背景技术:
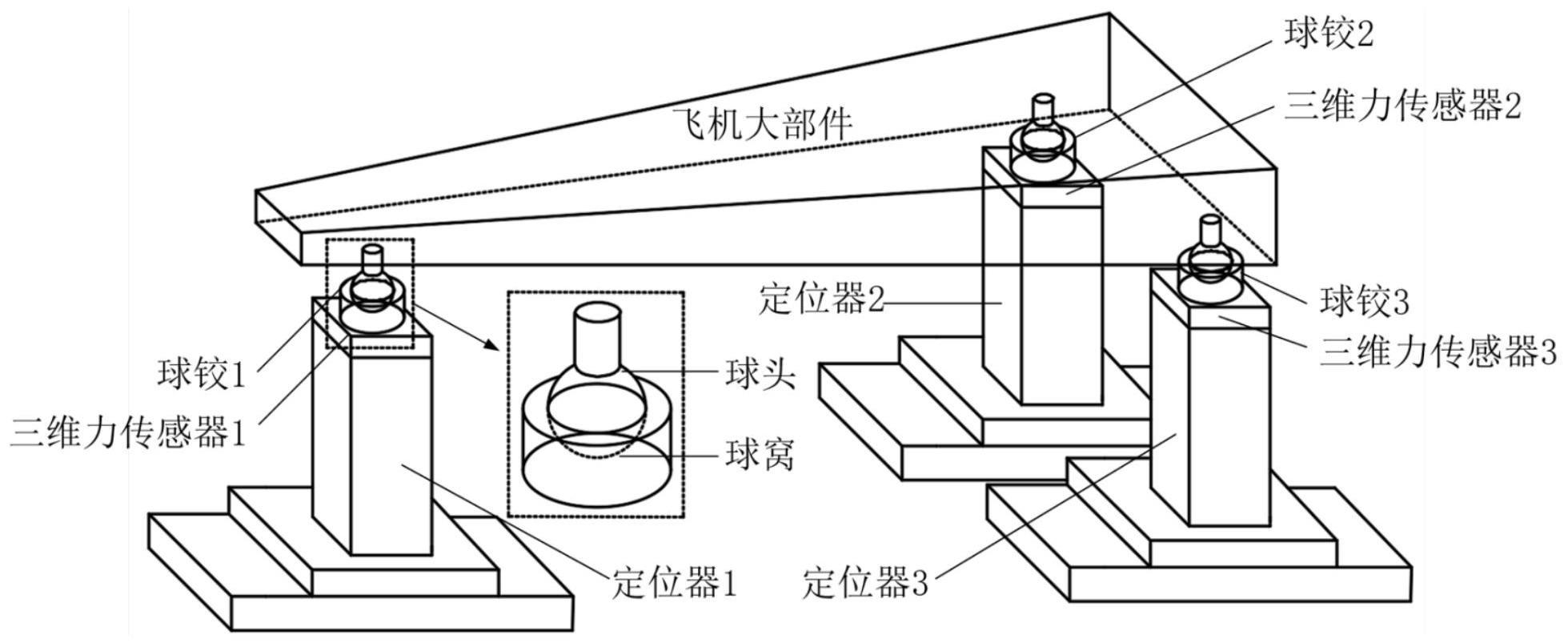
1、多台数控定位器及其末端球窝组成的调姿机构被广泛应用于飞机部件的数字化装配中,驱动定位器使得与飞机部件固连的工艺球头准确落入定位器末端球窝的这一过程被称为球头入位。为保证部件的调姿精度,同时防止入位后球头球窝相对位置发生改变,设计的工艺球头和球窝之间配合间隙极小,除此之外,入位时过大的接触应力可能对飞机结构造成损坏,整个过程应在低应力条件下进行,因此,要实现飞机部件准确且柔顺的入位十分困难。
2、目前常见的球头入位方法可大致分为被动入位和主动入位,根据球窝找正球头方式的不同,主动入位又可被分为测量入位和自适应入位。被动入位即通过特殊的机械结构调整球头球窝的相对位置以释放因位置偏差引起的强迫接触应力,但是自稳定性较差,很难保证调姿过程中调姿机构对部件的稳固支撑。测量入位的关键在于如何获得球头球窝之间准确的相对位置关系,但是仅考虑了球头球窝配合的位置准确性,却忽略了入位过程的柔顺性,球头球窝之间的低接触应力要求很难得到保证。不同于测量入位对球头球窝相对位置偏差的直接补偿,自适应入位通过构建驱动系统与入位系统的力位耦合关系,实现定位器末端对球头位置的主动找正,阻抗控制通过构建特定的控制器系统使其拥有合适的阻抗特性,从而实现对执行器位置与力的间接动态控制。
3、为解决飞机大部件工艺球头的准确柔顺入位难题,本发明提出了一种基于阻抗参数优化的球头自适应入位方法。由实际接触力和参考轨迹偏差构建球头入位的阻抗控制模型,并基于人工鱼群算法对阻抗参数进行优化;为提高阻抗控制器在未知环境下的鲁棒性,进一步基于模型参考设计了球头入位的自适应阻抗控制方法。
技术实现思路
1、本发明的目的在于提供一种基于滑模控制的球头自适应入位技术,以解决上述背景技术中提出的问题。
2、实现上述目的,本发明提供如下技术方案:包括以下步骤:
3、一种基于阻抗参数优化的球头自适应入位方法,包括以下步骤:
4、s1:自适应生成球头入位过程参考入位轨迹,并由实际接触力和参考轨迹偏差构建球头人位的阻抗控制模型;
5、s2:基于人工鱼群算法调整阻抗参数,自适应整定和优化阻抗参数;
6、s3:基于模型参考设计自适应阻抗控制器,对决策计算出来的阻抗参数进行自适应修正以自动矫正控制动作。
7、优选地,所述步骤s1中的参考入位轨迹表示为:
8、
9、式中fx、fy、fw分别为球头球窝接触的各向分力,可由三维力传感器采集获得;v0为定位器的初始顶升速度;t为时间。
10、优选地,所述步骤s1中的阻抗控制模型可表示为:
11、md(x″-x″d)+bd(x′-x′d)+kd(x-xd)=fe-fd
12、fe=be(x′-x′e)+ke(x-xe)
13、其中md、bd和md分别为目标阻抗模型的惯性矩阵、阻尼矩阵和刚度矩阵,x为定位器末端实际运动轨迹,xd为定位器末端参考运动轨迹,fe为定位器末端球窝与球头的实际接触力,fd为定位器末端球窝与球头的期望作用力;xe为环境位置,be为环境等效阻尼,ke为环境等效刚度。
14、则目标阻抗模型在笛卡尔坐标系任一坐标轴方向上的表达式为:
15、md(x″-x″d)+bd(x′-x′d)+kd(x-xd)=fe-fd
16、fe=be(x′-x′e)+ke(x-xe)
17、令δx=x-xd,代表执行器末端的位置变化,也即经理想阻抗模型后的执行器输出轨迹修正量,同时对阻抗控制模型进行拉普拉斯变换可得到其频域范围内的表达式为:
18、
19、优选地,所述步骤s2中人工鱼群算法进行阻抗控制参数优化的过程如下:
20、4.1参数初始化,md、bd和kd分别为目标阻抗模型的惯性矩阵、阻尼矩阵和刚度矩阵,设置人工鱼群大小为n,范围分别为[md1,md2]、[bd1,bd2]和[kd1,kd2],产生一个3行3列的初始参数阵列,每列表示一条人工鱼的三个待优化参数;
21、4.2觅食行为,即参数微调阶段,设置人工鱼当前状态为xi=[mdi,bdi,kdi],mdi,bdi,kdi分别是砌、bd和kd在当前状态的参数,设定人工鱼活动半径为r,活动步长为d,在该范围内随机选择一个状态xi并计算对应食物浓度yi,判断是否满足前进条件,反复尝试不超过m次后,如果仍不满足前进条件,则随机按照活动步长d移动一步。
22、4.3包括两个参数比较阶段:
23、4.3.1聚群行为,设置人工鱼当前状态为xi,探索当前领域内的伙伴数目nf及中心位置xc=[mdc,bdc,kdc],如果yc/nf>δyi,表明人工鱼伙伴中心有较多的食物并且不太拥挤,则朝伙伴中心位置前进一步,否则执行4.2觅食行为,其中δ是拥挤度因子,设置为p。
24、4.3.2追尾行为,设置人工鱼当前状态为xi,探索当前领域内的伙伴数目nf及伙伴中巧最大的伙伴xj,如果yj/nf>δyi,表明伙伴xj的状态具有较高的食物浓度并且其周围不太拥挤,则朝伙伴xj的方向前进一步,否则执行4.2觅食行为,其中δ是拥挤度因子,设置为q。
25、4.4确定参数下一步调整方向,对比4.3.1和4.3.2结果,输出对应食物浓度较大的参数,再重复步骤4.2和4.3,其中迭代次数不超过l次。
26、优选地,所述步骤s3中的自适应阻抗控制器表达形式为:
27、
28、式中,e(t)为某一自由度方向上作用力误差,p(t)为时变的自适应比例力反馈系数,d(t)为时变的自适应微分力反馈系数,g(t)为与e(t)和e(t)′相关的辅助函数项;σ0其σ1其σ2其补为修正因子且均为小正数。
技术特征:
1.一种基于阻抗参数优化的球头自适应入位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于阻抗参数优化的球头自适应入位方法,其特征在于,所述步骤s1中的参考入位轨迹表示为:
3.根据权利要求1所述的基于阻抗参数优化的球头自适应入位方法,其特征在于,所述步骤s1中的阻抗控制模型可表示为:
4.根据权利要求1所述的基于阻抗参数优化的球头自适应入位方法,其特征在于,所述步骤s2中人工鱼群算法进行阻抗控制参数优化的过程如下:
5.根据权利要求1所述的基于阻抗参数优化的球头自适应入位方法,其特征在于,所述步骤s3中的自适应阻抗控制器表达形式为:
技术总结
本发明公开了一种基于阻抗参数优化的球头自适应入位方法,包括以下步骤:S1:自适应生成球头入位过程参考入位轨迹,并由实际接触力和参考轨迹偏差构建球头入位的阻抗控制模型;S2:基于人工鱼群算法调整阻抗参数,自适应整定和优化阻抗参数;S3:基于模型参考设计自适应阻抗控制器,对决策计算出来的阻抗参数进行自适应修正以自动矫正控制动作。本发明的优点在于:1)自适应入位能够实现定位器末端对球头位置的主动找正,减小入位过程中的应力状况;2)构建特定的阻抗控制器提高球头在入位过程中对未知环境的鲁棒性,保证部件调姿精度和柔顺性。
技术研发人员:李根,李泷杲,刘洋,侯国义,黄翔,楼佩煌
受保护的技术使用者:南京航空航天大学苏州研究院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!