自动化棒状物料环切系统的制作方法
本发明涉及自动化控制环切结构,具体涉及一种自动化棒状物料环切系统。
背景技术:
1、目前在在棒状物料的切割过程中,因为棒状物的形态,使得棒状物料在在加工过程中,通常采用环切的方式,来控制零件的切割尺寸和切割面的切割深度,从而满足不同长度的需求、产品或组件的特定形状和尺寸。
2、常见的加工方式为采用切割设备直接对棒状物料的切割点进行切割,考虑到棒状物料在切割过程中受力问题,一般而言棒状物料局部受压过程中,由于切割设备对切割点的局部压力作用,其棒状物料的局部区域受压,从而可能使得切割点位发生变形,从而影响切割精度和物料切割面的质量。对特别是对于量产加过而言,其精度的控制更多在于误差降低,以及避免材料切割晃动而导致产品尺寸偏差。
3、因此,当前的棒状物料在整个切割工艺上,对于切割点的选择,一般需要匹配相应的限位设备,从而导致切割过程中对于棒状物料的工况改变,原有设备的切割方式可能出现不配合,进而增加更多的工作量。即便部分切割点部分采用采用锯片切割,降低了切割的压力,但是切割刀具的转速过快,使得切割过程中产生的摩擦力也很容易导致棒状物料在局部区域产生应力影响,可能会导致零件内部出现裂纹,甚至产生断裂隐患。还值得说明的是,若棒状物料材质为韧性材质,可能在切割过程中还容易出现明显的应力变化,从而导致切面实际工作路径与设计路径存在差异。因此,如何优化现有的生产过程中的量产切割,并尽可能的符合更多工况需求,是值得研究的。
技术实现思路
1、本发明的目的在于提供一种自动化棒状物料环切系统,以期望改善现有棒状物料批量切割过程中,可能因为产品形变或者切割压力导致的产品切割偏差增大,以及切割点调整后设备工况不匹配的问题。
2、为解决上述的技术问题,本发明采用以下技术方案:
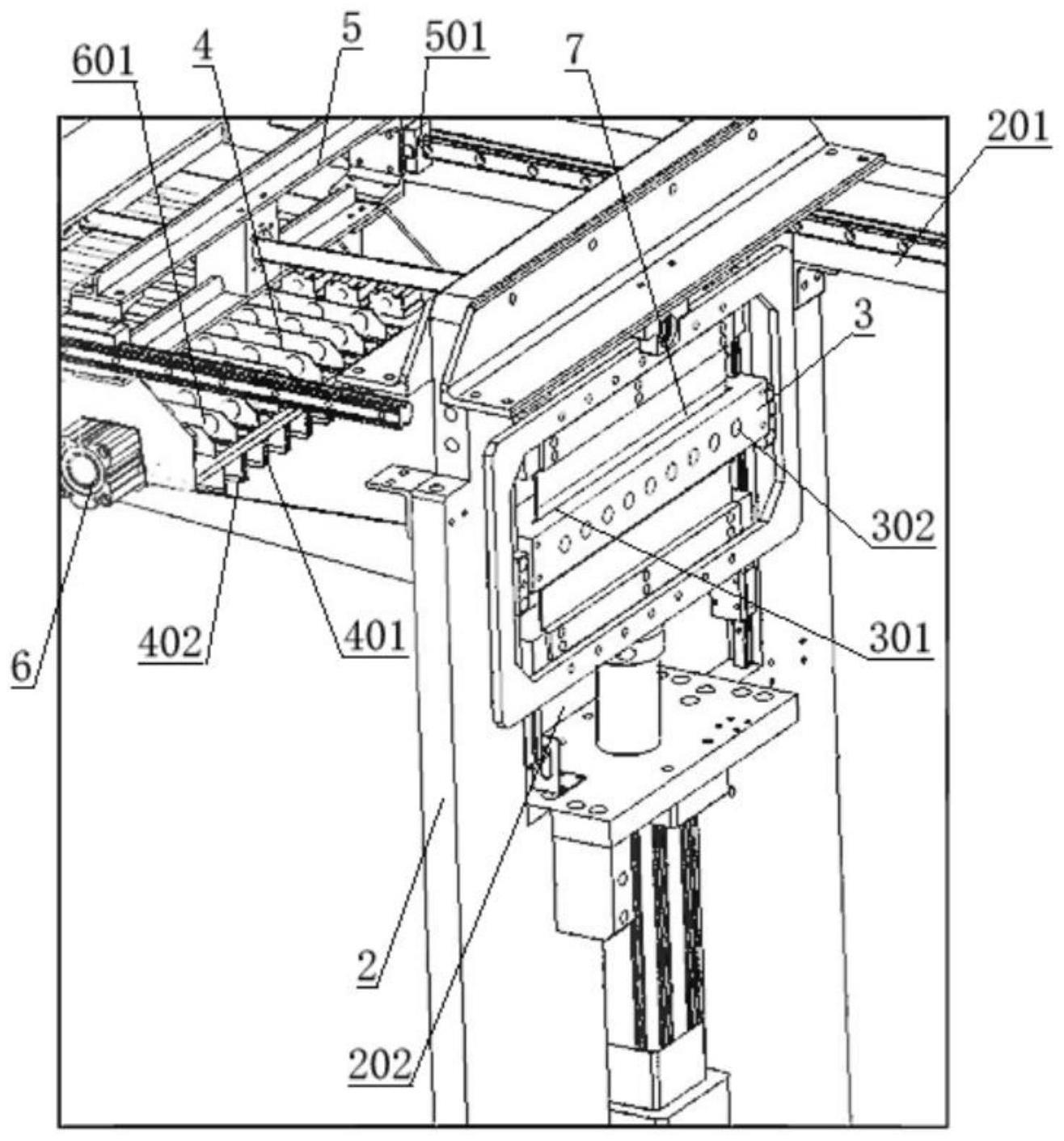
3、一种自动化棒状物料环切系统,包括切割装置,上述切割装置安装在运输载体一侧,由运输载体将棒状物料输送到切割装置处,上述切割装置包括切割支架、切割块和机械抓手;上述切割支架上设有导轨,上述机械抓手活动安装在导轨上,上述机械抓手用于抓取运输载体上的棒状物料;上述切割块设置在切割支架上,上述切割块竖直方向上设有供切刀穿过的环切口,上述切割块上设有供棒状物料穿过的安置孔;由机械抓手将棒状物料输送至安置孔中;上述机械抓手包括机械支撑体,上述机械支撑体下端设有若干个基准夹板,上述机械支撑体上设有与基准夹板相对的活动夹板;上述活动夹板用于在机械支撑体上移动并与基准夹板形成夹持;上述机械支撑体上设有行程气缸,上述活动夹板上端与行程气缸的活动端动力连接,由行程气缸带动活动夹板在机械支撑体上移动。
4、作为优选,上述切割块上的安置孔为多个,上述活动夹板数量与安置孔对应,上述活动夹板上端设有同步柱,上述活动夹板上端均连接同步柱,上述同步柱端部用于连接行程气缸,由行程气缸推动同步柱移动,使若干个活动夹板同步移动。
5、进一步的技术方案是,上述同步柱为多个,上述同步柱之间相互平行,由一个活动夹板在纵向上连接多个同步柱。
6、作为优选,上述切割块上端和下端均设有环切口,上述环切口上方和下方均设有对应的切刀,上述切刀的刀背用于连接推出设备,由推出设备将切刀退入环切口中,且切割块上方和下方的两个切刀刃口朝向相对,由推出设备控制切刀的进深。
7、进一步的技术方案是,上述切割支架上设有安装槽,上述安装槽用于安装推出设备,上述安装槽上设有限位板,上述限位板用于约束推出设备上端的活动杆伸出并连接切刀。
8、作为优选,上述导轨至少两个以上,上述机械支撑体两端设有与导轨对应的滑块,上述滑块用于在导轨中移动并约束机械支撑体形态。
9、进一步的技术方案是,上述切割支架上设有丝杠,上述机械支撑体上设有丝杠滑块,上述丝杠滑块套设在丝杠上,上述丝杠用于配合丝杠滑块带动机械支撑体在导轨上移动。
10、再进一步的技术方案是,上述机械支撑体包括上支部和下支部,上述下支部上端连接上支部,上述滑块置于上支部两端,且上支部设有空腔,上述丝杠滑块固定安装在上支部中部;上述基准夹板、活动夹板和行程气缸均安装在下支部上,上述下支部用于与上支部同步移动。
11、再进一步的技术方案是,上述下支部设有供活动夹板穿过的配置槽,上述基准夹板固定在配置槽下端,上述配置槽尺寸大于活动夹板移动形成。
12、作为优选,上述运输载体为两个,上述导轨两端分别延伸到运输载体上方,上述导轨两侧均设有机械抓手。
13、现有技术相比,本发明的有益效果至少是如下之一:
14、本发明通过切割支架上的设有导轨限制机械抓手的移动范围,从而使得机械抓手沿导轨进行移动,从而便于机械抓手将棒状物料稳定的输入到切割块的安置孔中,其安置孔具有一定长度,从而通过安置孔与棒状物料尺寸适配,进而通过安置孔能够进行对切割点位进行限制,其次整个机械抓手在切割过程中,维持对棒状物料的抓持,从而使得棒状物料的晃动风险的得到进一步的改善,并且通过机械抓手可以准确地定位和移动棒状物料,当机械抓手将棒状物料插入到适配的安置孔中,可以实现精准的切割限位。
15、本发明可以通过运输载体将棒状物料输送到切割装置处,机械抓手负责抓取棒状物料并将其输送至安置孔中,这种方式还能够降低棒状物料的转动风险,而切割块上设有竖直方向的环切口,通过对切刀进深的控制,可以实现对于棒状物料的需求性切割,即局部切割需求,利用切割块的环切口设计,确保了切刀的进刀路径,并配合机械抓手进行控位,有效的满足特定的切割需求实现了自动化的物料处理过程
16、本发明的采用行程气缸带动基准夹板和活动夹板进行夹持,其活动夹板为多个,其每个活动夹板在同步柱和行程气缸的作用下,可以保持相同的夹持力度和相同夹持动作,从而便于整个切割和挪动过程中的匹配度和稳定性。
技术特征:
1.一种自动化棒状物料环切系统,包括切割装置,所述切割装置安装在运输载体(1)一侧,由运输载体(1)将棒状物料输送到切割装置处,其特征在于:所述切割装置包括切割支架(2)、切割块(3)和机械抓手(4);
2.根据权利要求1所述的自动化棒状物料环切系统,其特征在于:所述切割块(3)上的安置孔(302)为多个,所述活动夹板(402)数量与安置孔(302)对应;
3.根据权利要求2所述的自动化棒状物料环切系统,其特征在于:所述同步柱(601)为多个,所述同步柱(601)之间相互平行,由一个活动夹板(402)在纵向上连接多个同步柱(601)。
4.根据权利要求1所述的自动化棒状物料环切系统,其特征在于:所述切割块(3)上端和下端均设有环切口(301),所述环切口(301)上方和下方均设有对应的切刀(7),所述切刀(7)的刀背用于连接推出设备,由推出设备将切刀(7)退入环切口(301)中,且切割块(3)上方和下方的两个切刀(7)刃口朝向相对,由推出设备控制切刀(7)的进深。
5.根据权利要求4所述的自动化棒状物料环切系统,所述切割支架(2)上设有安装槽(202),所述安装槽(202)用于安装推出设备,所述安装槽(202)上设有限位板(203),所述限位板(203)用于约束推出设备上端的活动杆伸出并连接切刀(7)。
6.根据权利要求1所述的自动化棒状物料环切系统,其特征在于:所述导轨(201)至少两个以上,所述机械支撑体(5)两端设有与导轨(201)对应的滑块(501),所述滑块(501)用于在导轨(201)中移动并约束机械支撑体(5)形态。
7.根据权利要求6所述的自动化棒状物料环切系统,其特征在于:所述切割支架(2)上设有丝杠(8),所述机械支撑体(5)上设有丝杠滑块(9),所述丝杠滑块(9)套设在丝杠(8)上,所述丝杠(8)用于配合丝杠滑块(9)带动机械支撑体(5)在导轨(201)上移动。
8.根据权利要求7所述的自动化棒状物料环切系统,其特征在于:所述机械支撑体(5)包括上支部(502)和下支部(503),所述下支部(503)上端连接上支部(502),所述滑块(501)置于上支部(502)两端,且上支部(502)设有空腔,所述丝杠滑块(9)固定安装在上支部(502)中部;所述基准夹板(401)、活动夹板(402)和行程气缸(6)均安装在下支部(503)上,所述下支部(503)用于与上支部(502)同步移动。
9.根据权利要求8所述的自动化棒状物料环切系统,其特征在于:所述下支部(503)设有供活动夹板(402)穿过的配置槽(504),所述基准夹板(401)固定在配置槽(504)下端,所述配置槽(504)尺寸大于活动夹板(402)移动形成。
10.根据权利要求1所述的自动化棒状物料环切系统,其特征在于:所述运输载体(1)为两个,所述导轨(201)两端分别延伸到运输载体(1)上方,所述导轨(201)两侧均设有机械抓手(4)。
技术总结
本发明公开了一种自动化棒状物料环切系统,包括切割装置,切割装置包括切割支架、切割块和机械抓手;切割支架上设有导轨,机械抓手活动安装在导轨上,切割块设置在切割支架上,切割块竖直方向上设有供切刀穿过的环切口,切割块上设有供棒状物料穿过的安置孔;机械抓手包括机械支撑体,机械支撑体下端设有若干个基准夹板,机械支撑体上设有与基准夹板相对的活动夹板;机械支撑体上设有行程气缸,活动夹板上端与行程气缸的活动端动力连接,由行程气缸带动活动夹板在机械支撑体上移动;以期望改善现有棒状物料批量切割过程中,可能因为产品形变或者切割压力导致的产品切割偏差增大,以及切割点调整后设备工况不匹配的问题。
技术研发人员:熊安国
受保护的技术使用者:泸州艺乔科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!