碟形砂轮展成非正交偏置斜齿面齿轮副的变位齿形方法
本发明涉及齿轮加工,尤其涉及碟形砂轮展成非正交偏置斜齿面齿轮副的变位齿形方法。
背景技术:
1、斜齿面齿轮副在航空领域,尤其在直升机传动系统中,有着重要应用。现在对斜齿面齿轮副的研究多为正交或正交偏置斜齿面齿轮副的研究,忽视了最复杂、最具有普遍意义的非正交偏置变位一体的斜齿面齿轮副的研究。
2、面齿轮常见的加工方法包括插齿、滚齿、和磨齿。插齿刀加工面齿轮原理,同面齿轮传动啮合原理高度一致,是后续研究面齿轮齿面、修形、滚齿与磨齿等的理论基础。litvin等基于面齿轮插齿原理,奠定了点接触面齿轮传动的啮合理论,并详细阐述了面齿轮齿根根切与齿顶变尖条件。加拿大northstar aerospace公司也成功研制了面齿轮数控插齿机,实现了对面齿轮的插齿加工。我国学者则对加工干涉、齿面设计、啮合仿真等进行了研究,并掌握了正交面齿轮的插齿技术。
3、磨齿加工方法是面齿轮齿面精度的关键技术。litvin等提出了蜗杆砂轮磨削面齿轮的方法,但砂轮修整设备与刀具比较复杂。美国gleason公司stadtfeld博士分别提出了碟形砂轮、直刃刀具磨削面齿轮的方法,由于碟形砂轮具有结构简单、设计制造和修整方便、机床运动易于实现等优点,国内学者对其进行了深入研究。
4、插齿刀展成非正交偏置变位斜齿面齿轮副精度不高,以及蜗杆砂轮制造复杂、修整困难、齿面受奇异性影响,不适用于某些参数的面齿轮副。
技术实现思路
1、本发明的目的在于提供碟形砂轮展成非正交偏置斜齿面齿轮副的变位齿形方法,解决插齿刀展成非正交偏置变位斜齿面齿轮副精度不高,以及蜗杆砂轮制造复杂、修整困难、齿面受奇异性影响,不适用于某些参数的面齿轮副的技术问题。采用变位碟形砂轮来加工非正交偏置变位斜齿面齿轮副,不仅结构简单,设计制造和修整方便且不受面齿轮设计参数限制,还可以得到精度较高的齿面。
2、本发明提出碟形砂轮展成非正交偏置斜齿面齿轮副的变位齿形,若分别用正变位和负变位的碟形砂轮加工变位小轮和非正交偏置斜齿面齿轮,则得到的负变位小轮和正变位非正交偏置斜齿面齿轮,可以构成非正交偏置变位斜齿面齿轮副。采用变位碟形砂轮来加工非正交偏置变位斜齿面齿轮副,不仅结构简单,设计制造和修整方便且不受面齿轮设计参数限制,还可以得到精度较高的齿面。本发明主要用于非正交偏置斜齿面齿轮副的变位齿形展成,为加工非正交偏置变位斜齿面齿轮副提供技术方法。
3、为了实现上述目的,本发明采用的技术方案如下:
4、碟形砂轮展成非正交偏置斜齿面齿轮副的变位齿形方法,用第一变位碟形砂轮加工变位小轮,用第二变位碟形砂轮加工非正交偏置变位斜齿面齿轮,通过第一变位碟形砂轮绕第一虚拟变位插齿刀的旋摆来模拟第一虚拟变位插齿刀与变位小轮的展成运动,第二变位碟形砂轮绕第二虚拟变位插齿刀的旋摆来模拟第二虚拟变位插齿刀与非正交偏置变位斜齿面齿轮的展成运动,第一变位碟形砂轮和第二变位碟形砂轮均自转构成切削运动,第一变位碟形砂轮中心沿平行于第一虚拟变位插齿刀的轴往复移动构成进给运动,第二变位碟形砂轮中心沿平行于第二虚拟变位插齿刀的轴往复移动构成进给运动。
5、进一步地,第一虚拟变位插齿刀与第二虚拟变位插齿刀的模数相同,端面压力角相同,第二虚拟变位插齿刀与变位小轮的位矢相同,若第一虚拟变位插齿刀正变位,则第二虚拟变位插齿刀与变位小轮负变位,非正交偏置斜齿面齿轮正变位,生成的负变位小轮与正变位非正交偏置斜齿面齿轮构成一对非正交偏置变位斜齿面齿轮副。
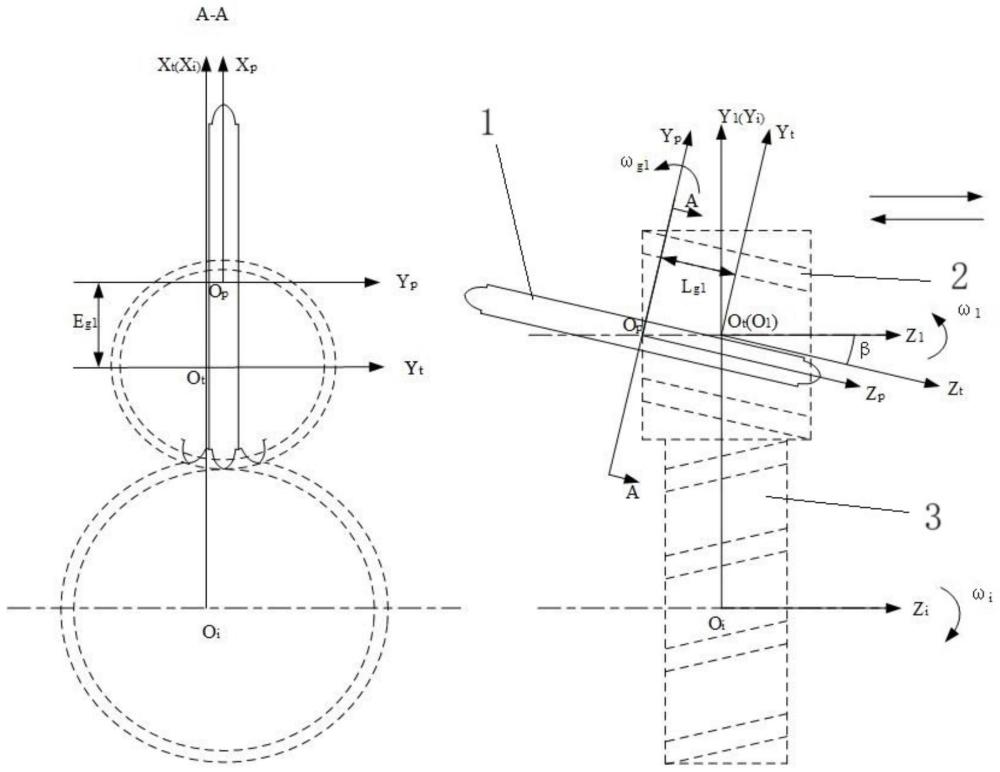
6、进一步地,第一虚拟变位插齿刀和第二虚拟变位插齿刀与变位小轮的展成运动的具体过程为:坐标系s1、sg1、si分别与第一虚拟变位插齿刀、第一变位碟形砂轮、第二虚拟变位插齿刀和变位小轮固联,i=2,3分别表示第二虚拟变位插齿刀和变位小轮的坐标系或齿面参数,sp、st为辅助坐标系,磨削时存在三种运动关系:第一变位碟形砂轮以角速度ω1绕第一虚拟变位插齿刀的z1轴旋摆,第一模拟虚拟变位插齿刀的回转,与第二虚拟变位插齿刀和变位小轮以角速度ωi绕轴zi的回转构成展成运动,且ωi=ω1mi1,mi1为第一虚拟变位插齿刀与第二虚拟变位插齿刀和变位小轮的齿数比,第一虚拟变位插齿刀与第一变位碟形砂轮的中心距在x轴和z轴方向的投影分别为eg1和lg1,第一虚拟变位插齿刀的z1轴与第一变位碟形砂轮端面成螺旋角β,第一变位碟形砂轮以平行于第一虚拟变位插齿刀的z1轴方向进给运动,变位碟形砂轮以角速度ωg1高速自转构成切削运动。
7、进一步地,第一虚拟变位插齿刀的齿面方程为:
8、第一虚拟变位插齿刀的截面参数中,rp1、rb1分别表示第一虚拟变位插齿刀的分度圆半径和基圆半径,θ1表示齿轮的转角参数,θb1表示表示基圆上1/2齿槽宽所对应的圆心角,λ1表示第一虚拟变位插齿刀端面渐开线绕轴线的转角,p1表示螺旋运动参数,在s1坐标系中,第一虚拟变位插齿刀的齿面由下式表示:
9、d=θb1+θ1±λ1,
10、θb1=π/(2n1)-(tanαt-αt)-(xmn·tanαt)/rp1,n1表示第一虚拟变位插齿刀的齿数,αt表示虚拟变位插齿刀的端面压力角,xmn表示变位量。
11、进一步地,第一变位碟形砂轮的齿面方程为:
12、第一变位碟形砂轮的产形线是第一虚拟变位插齿刀的端面截线,因此,第一变位碟形砂轮齿面为渐开线旋转曲面,此时lg1=0,θg1为砂轮1曲面的角度参数,mt1、mpt、mg1p坐标系s1到坐标系st、坐标系st到坐标系sp、坐标系sp到坐标系sg1的坐标变换矩阵,在sg1中,第一变位碟形砂轮1的位矢和单位法矢由下式表示:rg1(θ1,λ1,θg1)=mg1p(θg1)mptmt1r1(θ1,λ1),ng1(θ1,λ1,θg1)=lg1p(θg1)lptlt1n1(θ1,λ1)
13、进一步地,第二虚拟变位插齿刀和变位小轮的齿面方程为:
14、第二虚拟变位插齿刀和变位小轮展成坐标系中,sm、sn为辅助坐标系,l0表示第一虚拟变位插齿刀2和第二虚拟变位插齿刀3的中心距,φi=φg1mi1,在si坐标系中,第二虚拟变位插齿刀和变位小轮的齿面方程由下式表示:
15、ri(θ1,λ1,θg1,φg1,lg1)=minmnmmm1(φg1)m1tmtg1(lg1)rg1(θ1,λ1,θg1)
16、f1(θ1,λ1,θg1,φg1,lg1)=ng1ν1=0
17、f2(θ1,λ1,θg1,φg1,lg1)=ng1ν2=0
18、ni(θ1,λ1,θg1,φg1,lg1)=linlnmlm1(φg1)l1tltg1(lg1)ng1(θ1,λ1,θg1)
19、上式联立消去参数θg1,可用ri(θ1,λ1,φg1,lg1)表示虚拟第二虚拟变位插齿刀和变位小轮的齿面;
20、
21、ν1=[0 0 1],
22、ν1、ν2分别是第一变位碟形砂轮的中心速度、第二虚拟变位插齿刀和变位小轮与第一变位碟形砂轮的相对速度。
23、进一步地,第二虚拟变位碟形砂轮的齿面方程为:
24、第二虚拟变位碟形砂轮的产形线是虚拟变位插齿刀的端面截线,因此,第二虚拟变位碟形砂轮齿面为渐开线旋转曲面,此时lg2=0,坐标系s2和坐标系sg2分别与第二虚拟变位插齿刀、第二变位碟形砂轮固联,sp、st为辅助坐标系,第二虚拟变位插齿刀与第二变位碟形砂轮的中心距在x轴和z轴方向的投影分别为eg2和lg2,第二虚拟变位插齿刀的z2轴与第二变位碟形砂轮端面成螺旋角β,θg2为第二变位碟形砂轮曲面的角度参数,mt2、mpt、mg2p坐标系s2到坐标系st、坐标系st到坐标系sp、坐标系sp到坐标系sg2的坐标变换矩阵,在sg2中,第二变位碟形砂轮4的位矢和单位法矢由下式表示:
25、rg2(θ2,θg2,λ2,φg2)=mg2p(θg2)mptmt2r2(θ2,λ2,φg2)
26、ng1(θ2,θg2,λ2,φg2)=lg1p(θg2)lptlt1n1(θ2,λ2,φg2)
27、θ2=-θ1m21,m21是第一虚拟变位插齿刀与第二虚拟变位插齿刀的齿数比
28、λ2=-λ1,φg2=m21φg1;
29、θb2=π/(2n2)-(tanαt-αt)-(xmn·tanαt)/rp2,n2表示第二虚拟变位插齿刀的齿数,rp2表示第二虚拟变位插齿刀的分度圆半径;
30、进一步地,展成非正交偏置变位斜齿面齿轮的运动过程为:
31、第二虚拟变位插齿刀轴线与非正交偏置变位斜齿面齿轮轴线不平行且不相交,具有一个相错角γm和一个偏置距e,l1表示第二虚拟变位插齿刀和非正交偏置斜齿面齿轮的中心距,磨削时存在三种运动关系:第二变位碟形砂轮以角速度ω2绕第二虚拟变位插齿刀的z2轴旋摆,模拟第二虚拟变位插齿刀的回转,与非正交偏置变位斜齿面齿轮以角速度ω4绕轴z4的回转构成展成运动,且ω4=ω2m42,m42为第二虚拟变位插齿刀与非正交偏置变位斜齿面齿轮的齿数比,第二变位碟形砂轮以平行于第二虚拟变位插齿刀的z2轴方向进给运动,变位碟形砂轮以角速度ωg2高速自转构成切削运动。
32、进一步地,非正交偏置斜齿面齿轮的变位齿面方程为:
33、坐标系s2和坐标系s4分别与第二虚拟变位插齿刀和非正交偏置斜齿面齿轮固联,sm、st、sk、sr、sn为辅助坐标系,为第二虚拟变位插齿刀和非正交偏置斜齿面齿轮的齿数比,在s4坐标系中,非正交偏置斜齿面齿轮的齿面方程由下式表示:
34、r4(θ2,θg2,λ2,φ4,lg2)=m4nmnrmrkmkmmm2m2tmtg2(lg2)rg2(θ2,θg2,λ2,φg2)
35、n4(θ2,θg2,λ2,φ4,lg2)=l4nlnrlrklkmlm2l2tltg2(lg2)ng2(θ2,θg2,λ2,φg2)
36、f3(θ2,θg2,λ2,φ4,lg2)=ng2ν3=0
37、f4(θ2,θg2,λ2,φ4,lg2)=ng2ν4=0
38、上式联立消去参数θg2,用r4(θ2,λ2,φ4,l2g)表示非正交偏置斜齿面齿轮的齿面;
39、ν3、ν4分别是第二变位碟形砂轮的中心速度、非正交偏置斜齿面齿轮与第二变位碟形砂轮的相对速度;
40、ν3=[0 0 1],
41、
42、
43、本发明由于采用了上述技术方案,具有以下有益效果:
44、本发明首先根据两个虚拟变位插齿刀的运动关系,以及虚拟变位插齿刀的齿面参数,推导变位碟形砂轮的齿面方程,再推导虚拟变位插齿刀与变位小轮的齿面方程,再根据虚拟变位插齿刀的齿面方程推导变位碟形砂轮的齿面方程,最后根据虚拟变位插齿刀与非正交偏置斜齿面齿轮的运动关系,以及变位碟形砂轮的齿面方程推导非正交偏置斜齿面齿轮的变位齿形。这样生成的变位小轮与非正交偏置变位斜齿面齿轮可以构成非正交偏置变位斜齿面齿轮副。采用变位碟形砂轮来加工非正交偏置变位斜齿面齿轮副,不仅结构简单,还可以得到精度较高的齿面。
- 还没有人留言评论。精彩留言会获得点赞!