一种汽车钣金自动化焊接机器人的制作方法
本发明涉及焊接领域,更具体地说,它涉及一种汽车钣金自动化焊接机器人。
背景技术:
1、我们日常生活中所见的汽车,大多数都是由一块块钢板制成的零部件拼装起来的,这个过程在生产制造中叫做焊装。其最主要的步骤就是使用电阻点焊,将一块块钢板拼接成牢固安全的白车身。
2、但汽车维修场景区别于上述汽车制造过程,往往会面临一些恶劣的焊接环境。汽车维修现场可能存在各种污染物,例如油渍、灰尘、腐蚀性液体等。而汽车的钣金件维修时,也常常会使用电阻点焊设备对汽车钣金件重新点焊固定,例如汽车的防撞梁、车门组件损坏后,都需要重新对钣金件祛除焊点后重新点焊固定。
3、在进行电阻点焊前,需要进行方案制定,确定焊点位置,但由于维修环境以及钣金件表面涂层的限制,点焊的过程中,钣金件表面的涂层或镀层以及维修环境中的油渍、灰尘在高温和高压的作用下熔化或变形,容易粘附在电极上,当电极与钣金件接触的端面都被涂层粘覆满后,电极与钣金件表面之间就产生了隔层,在电极与下一焊点位置接触时,隔层的存在会导致阻碍电流的流动,这将导致电阻焊接过程中产生的热量无法有效地传递到指定的焊接面处(隔层的产生,使两个电极的中心点位置偏移,应当熔融的中心点较隔层产生后向上或向下),焊接面通常为两个焊接的板件结合面,从而产生不规则的焊核,影响焊接的质量。
技术实现思路
1、本发明提供一种汽车钣金自动化焊接机器人,解决相关技术中电阻焊的电极在焊接过程中端部粘覆赃污后影响钣金件之间焊接质量的技术问题。
2、本发明提供了一种汽车钣金自动化焊接机器人,包括座体,座体上安装有机械臂,机械臂的输出端安装有电阻焊设备,电阻焊设备包括架体,架体上安装有大臂,大臂远离架体的端部安装有第一电极,架体上安装有第二电极,第一电极与第二电极同轴布置,且第二电极可沿第一电极的中轴线上下往复运动;
3、还包括清理单元,清理单元用于清理第一电极和第二电极与焊接件表面接触的端部,清理单元包括移动组件,移动组件的输出端连接有清理组件,移动组件用于驱动清理组件在三维空间中运动,使清理组件分别与第一电极和第二电极与焊接件表面接触的端部滑动接触。
4、在一个优选的实施方式中,清理组件为第一清理机构,第一清理机构包括可自转的盘体,盘体上开设有硬质区和软质区,硬质区上安装有砂纸,软质区上安装有毛刷。
5、在一个优选的实施方式中,第一清理机构还包括电机二,电机二的输出端与盘体固定连接,盘体上开设有缺口,缺口将硬质区与软质区隔开。
6、在一个优选的实施方式中,清理组件为第二清理机构,第二清理机构包括板体,板体上开设有直线槽,直线槽内设有粗糙区,直线槽与第一电极以及第二电极相适配。
7、在一个优选的实施方式中,直线槽的槽底面上转动安装有多个转盘,且多个转盘错位布置,转盘的顶面与第一电极和第二电极与焊接件表面接触的端部滑动接触。
8、在一个优选的实施方式中,移动组件为驱动机构,驱动机构包括固定架,固定架固定安装于大臂上,固定架上安装有连接杆,连接杆远离固定架的端部安装有气缸二,气缸二的输出端安装有气缸三。
9、在一个优选的实施方式中,固定架上固定安装有电机一,电机一的输出端连接有齿轮一,连接杆靠近固定架的端部转动安装于固定架上,连接杆靠近固定架的端部活动套装有转轴一,连接杆靠近固定架的端部上固定套装有齿轮二,齿轮二与齿轮一啮合连接。
10、在一个优选的实施方式中,连接杆远离固定架的端部内活动嵌装有转轴二,转轴二的一端与气缸二的固定端固定连接,转轴一与转轴二之间设有翻转机构,翻转机构包括摇杆一和摇杆二,摇杆一安装于转轴一远离固定架的端部,摇杆二安装于转轴二远离气缸二的端部,且摇杆一与摇杆二之间铰接有伸缩杆。
11、在一个优选的实施方式中,移动组件为六轴机械臂。
12、在一个优选的实施方式中,架体上安装有安装架、小臂一和小臂二,安装架远离架体的一端与机械臂的输出端连接,小臂一上安装有气缸一,气缸一的输出端连接有导杆,导杆的输出端与第二电极固定连接,且导杆活动设于小臂一与小臂二之间。
13、本发明的有益效果在于:本发明通过移动组件和清理组件在电极头复位的途中,快速在电极头上滑动擦过将电极头高温工作时粘覆形成的隔层清理干净,且不需要停机对电极头进行清理,既解决了电极头上粘覆的隔层影响焊接质量的问题,又不会影响焊接的正常进行。
技术特征:
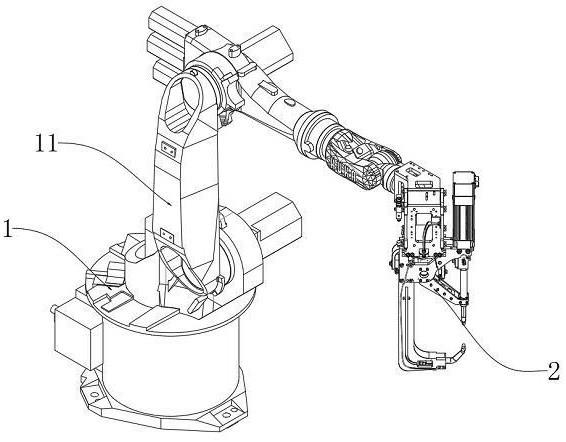
1.一种汽车钣金自动化焊接机器人,其特征在于,包括座体(1),所述座体(1)上安装有机械臂(11),所述机械臂(11)的输出端安装有电阻焊设备(2),所述电阻焊设备(2)包括架体(21),所述架体(21)上安装有大臂(22),所述大臂(22)远离架体(21)的端部安装有第一电极(23),所述架体(21)上安装有第二电极(24),所述第一电极(23)与第二电极(24)同轴布置,且所述第二电极(24)可沿第一电极(23)的中轴线上下往复运动;
2.根据权利要求1所述的一种汽车钣金自动化焊接机器人,其特征在于,所述清理组件为第一清理机构(4),所述第一清理机构(4)包括可自转的盘体(41),所述盘体(41)上开设有硬质区(42)和软质区(43),所述硬质区(42)上安装有砂纸,所述软质区(43)上安装有毛刷。
3.根据权利要求2所述的一种汽车钣金自动化焊接机器人,其特征在于,所述第一清理机构(4)还包括电机二(45),所述电机二(45)的输出端与盘体(41)固定连接,所述盘体(41)上开设有缺口(44),所述缺口(44)将硬质区(42)与软质区(43)隔开。
4.根据权利要求1所述的一种汽车钣金自动化焊接机器人,其特征在于,所述清理组件为第二清理机构(5),所述第二清理机构(5)包括板体(51),所述板体(51)上开设有直线槽(52),所述直线槽(52)内设有粗糙区,所述直线槽(52)与第一电极(23)以及第二电极(24)相适配。
5.根据权利要求4所述的一种汽车钣金自动化焊接机器人,其特征在于,所述直线槽(52)的槽底面上转动安装有多个转盘(53),且多个转盘(53)错位布置,所述转盘(53)的顶面与第一电极(23)和第二电极(24)与焊接件表面接触的端部滑动接触。
6.根据权利要求3或5所述的一种汽车钣金自动化焊接机器人,其特征在于,所述移动组件为驱动机构(3),所述驱动机构(3)包括固定架(31),所述固定架(31)固定安装于大臂(22)上,所述固定架(31)上安装有连接杆(32),所述连接杆(32)远离固定架(31)的端部安装有气缸二(33),所述气缸二(33)的输出端安装有气缸三(331)。
7.根据权利要求6所述的一种汽车钣金自动化焊接机器人,其特征在于,所述固定架(31)上固定安装有电机一(311),所述电机一(311)的输出端连接有齿轮一(312),所述连接杆(32)靠近固定架(31)的端部转动安装于固定架(31)上,所述连接杆(32)靠近固定架(31)的端部活动套装有转轴一(34),所述连接杆(32)靠近固定架(31)的端部上固定套装有齿轮二(341),所述齿轮二(341)与齿轮一(312)啮合连接。
8.根据权利要求7所述的一种汽车钣金自动化焊接机器人,其特征在于,所述连接杆(32)远离固定架(31)的端部内活动嵌装有转轴二(36),所述转轴二(36)的一端与气缸二(33)的固定端固定连接,所述转轴一(34)与转轴二(36)之间设有翻转机构(35),所述翻转机构(35)包括摇杆一(351)和摇杆二(353),所述摇杆一(351)安装于转轴一(34)远离固定架(31)的端部,所述摇杆二(353)安装于转轴二(36)远离气缸二(33)的端部,且所述摇杆一(351)与摇杆二(353)之间铰接有伸缩杆(352)。
9.根据权利要求1所述的一种汽车钣金自动化焊接机器人,其特征在于,所述移动组件为六轴机械臂。
10.根据权利要求1所述的一种汽车钣金自动化焊接机器人,其特征在于,所述架体(21)上安装有安装架(211)、小臂一(212)和小臂二(213),所述安装架(211)远离架体(21)的一端与机械臂(11)的输出端连接,所述小臂一(212)上安装有气缸一(25),所述气缸一(25)的输出端连接有导杆(26),所述导杆(26)的输出端与第二电极(24)固定连接,且所述导杆(26)活动设于小臂一(212)与小臂二(213)之间。
技术总结
本发明涉及焊接技术领域,公开了一种汽车钣金自动化焊接机器人,包括座体,座体上安装有机械臂,机械臂的输出端安装有电阻焊设备,电阻焊设备包括架体,架体上安装有大臂,大臂远离架体的端部安装有第一电极,架体上安装有第二电极,第一电极与第二电极同轴布置,且第二电极可沿第一电极的中轴线上下往复运动;本发明通过移动组件和清理组件在电极头复位的途中,快速在电极头上滑动擦过将电极头高温工作时粘覆形成的隔层清理干净,且不需要停机对电极头进行清理,既解决了电极头上粘覆的隔层影响焊接质量的问题,又不会影响焊接的正常进行。
技术研发人员:丁加松,余油油,杨晨,李贤明,王宜欢
受保护的技术使用者:安徽哈工道一智能制造技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!