机器人复合加工装置的制作方法
本公开涉及复合加工,尤其涉及一种机器人复合加工装置。
背景技术:
1、加工机器人是把机器人的终端执行器变为具有铣削、钻削、雕刻等功能的主轴系统,就使机器人成为机加工机床,机器人与cnc机床比较,结构完全不一样,但关节型机器人和传统的cnc机床一样,具有多轴功能,因为机器人的控制器、编程软件和cnc机床的数控系统不一样,因而导致机器人与cnc机床的用途不一样。
2、目前市场上存在的机器人加工装置不具备复合加工能力,并随着对机器人加工要求的复杂化和多样化,对于一些复杂工件和工序集中的工件的加工,所以亟需一种提高工件的加工效率的机器人复合加工装置。
技术实现思路
1、(一)要解决的技术问题
2、基于上述问题,本公开提供了一种机器人复合加工装置,以缓解现有技术中复合加工效率低等技术问题。
3、(二)技术方案
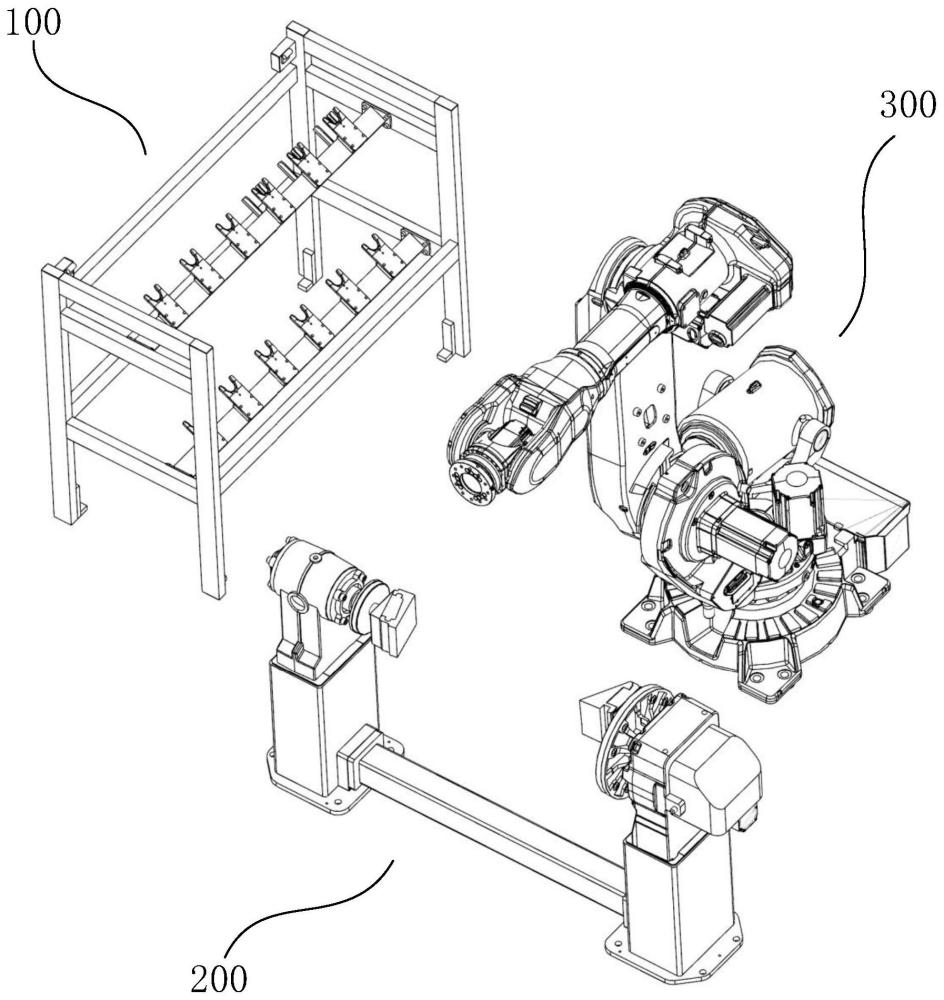
4、本公开提供了一种机器人复合加工装置,包括:
5、刀具存储部,用于存储加工工件所需的刀具;
6、工件夹持部,用于夹持所述工件,所述工件夹持部能够调整所述工件的位姿;
7、机器人执行部,能够取出并连接所述刀具存储部中的刀具,所述机器人执行部能够控制所述刀具,所述机器人执行部通过所述刀具对所述工件夹持部上的所述工件进行加工。
8、在本公开实施例中,所述刀具存储部包括:
9、存储架,与所述机器人执行部相邻设置,由金属焊接制成;
10、多个支撑杆,交错设置于所述存储架上,将所述存储架形成多层存储空间;
11、刀具固定夹具,设置于所述支撑杆上,所述刀具固定夹具用于盛放和夹持所述刀具。
12、在本公开实施例中,所述工件夹持部包括:
13、支撑体,设置于所述机器人执行部的一侧;
14、转台,与所述支撑体固定连接,所述转台能够带动所述工件转动;
15、工件夹具,固定连接于所述转台,所述工件夹具用于夹持所述工件。
16、在本公开实施例中,所述支撑体包括第一支撑柱、第二支撑柱和连接杆,其中,所述第一支撑柱与所述第二支撑柱通过所述连接杆连接,通过所述连接杆的长度能够调整所述第一支撑柱与所述第二支撑柱之间的距离。
17、在本公开实施例中,所述转台包括主动装置和从动装置,其中,所述主动装置和所述从动装置分别设置于所述第一支撑柱与所述第二支撑柱。
18、在本公开实施例中,所述工件夹具包括主动夹具部与被动夹具部,通过所述主动夹具部与所述被动夹具部实现对所述工件的夹持,其中,所述主动夹具部与所述被动夹具部分别连接于所述主动装置和所述从动装置,其中,所述主动装置的转轴转动能够带动所述主动夹具部、所述工件、所述被动夹具部及所述从动装置的转轴同步转动。
19、在本公开实施例中,所述机器人执行部包括:
20、机器人本体,用于控制所述刀具完成对所述工件的加工;
21、刀具连接器,用于连接所述机器人本体与所述刀具;
22、其中,所述机器人本体能够通过所述刀具连接器与所述刀具存储部中的刀具连接,进而将所述刀具存储部中的刀具取出。
23、在本公开实施例中,所述刀具存储部中的刀具包括:
24、焊枪、铣刀、砂轮、钻头及修磨带轮中一种或其组合;
25、其中,所述焊枪为外置式气冷自动焊枪。
26、在本公开实施例中,所述机器人执行部还包括:
27、控制柜,用于控制所述机器人本体与所述主动装置,使所述机器人本体与所述主动装置同步完成对所述工件的加工。
28、在本公开实施例中,所述的机器人复合加工装置,还包括:
29、保护围栏,用于为所述机器人复合加工装置工作过程中提供独立空间;
30、工作台,用于设置所述刀具存储部、所述工件夹持部、所述机器人执行部及所述保护围栏。
31、(三)有益效果
32、从上述技术方案可以看出,本公开机器人复合加工装置至少具有以下有益效果其中之一或其中一部分:
33、(1)可实现对复杂工件和工序集中的工件的加工,提高加工效率;
34、(2)能够大幅度简化工件的加工制作流程,提高成品率,降低加工成本。
技术特征:
1.一种机器人复合加工装置,包括:
2.根据权利要求1所述的机器人复合加工装置,其中,所述刀具存储部包括:
3.根据权利要求1所述的机器人复合加工装置,其中,所述工件夹持部包括:
4.根据权利要求3所述的机器人复合加工装置,其中,所述支撑体包括第一支撑柱、第二支撑柱和连接杆,其中,所述第一支撑柱与所述第二支撑柱通过所述连接杆连接,通过所述连接杆的长度能够调整所述第一支撑柱与所述第二支撑柱之间的距离。
5.根据权利要求4所述的机器人复合加工装置,其中,所述转台包括主动装置和从动装置,其中,所述主动装置和所述从动装置分别设置于所述第一支撑柱与所述第二支撑柱。
6.根据权利要求5所述的机器人复合加工装置,其中,所述工件夹具包括主动夹具部与被动夹具部,通过所述主动夹具部与所述被动夹具部实现对所述工件的夹持,其中,所述主动夹具部与所述被动夹具部分别连接于所述主动装置和所述从动装置,其中,所述主动装置的转轴转动能够带动所述主动夹具部、所述工件、所述被动夹具部及所述从动装置的转轴同步转动。
7.根据权利要求5所述的机器人复合加工装置,其中,所述机器人执行部包括:
8.根据权利要求7所述的机器人复合加工装置,其中,所述刀具存储部中的刀具包括:
9.根据权利要求8所述的机器人复合加工装置,其中,所述机器人执行部还包括:
10.根据权利要求1所述的机器人复合加工装置,还包括:
技术总结
本公开提供一种机器人复合加工装置,涉及复合加工技术领域。机器人复合加工装置包括:刀具存储部,用于存储加工工件所需的刀具;工件夹持部,用于夹持工件,工件夹持部能够调整工件的位姿;机器人执行部,能够取出并连接刀具存储部中的刀具,机器人执行部能够控制刀具,机器人执行部通过刀具对工件夹持部上的工件进行加工。可实现对复杂工件和工序集中的工件的加工,提高加工效率。
技术研发人员:蔡辉,孙伟,陈胜男,庞子瑞
受保护的技术使用者:中铁工程装备集团(天津)有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!