多功能机械手的制作方法
本发明涉及自动化装配,尤其涉及一种多功能机械手。
背景技术:
1、自动化装配是指以自动化机械代替人工劳动的一种装配技术。自动化装配相较于人工装配效率高,且装配精度高。现有的自动化装配过程中,一般涉及将一个工件装配至另一个工件上,其中,为提高工作效率,会通过托盘盛放若干工件,然后将托盘放置于机架上,然后,再通过机械手对托盘上的工件进行抓取,上述托盘的放置过程一般人工放置,降低了装配效率,现有技术中部分会使用两个机械手分别转移工件和托盘的产品,但是两个机械手的设置使得整个设备的成本较高,占用空间大。
2、为此,亟需研究一种多功能机械手,以解决上述问题。
技术实现思路
1、本发明的目的在于提供一种多功能机械手,以解决现有技术中装配设备成本高,且占用空间大的问题。
2、为达上述目的,本发明采用以下技术方案:
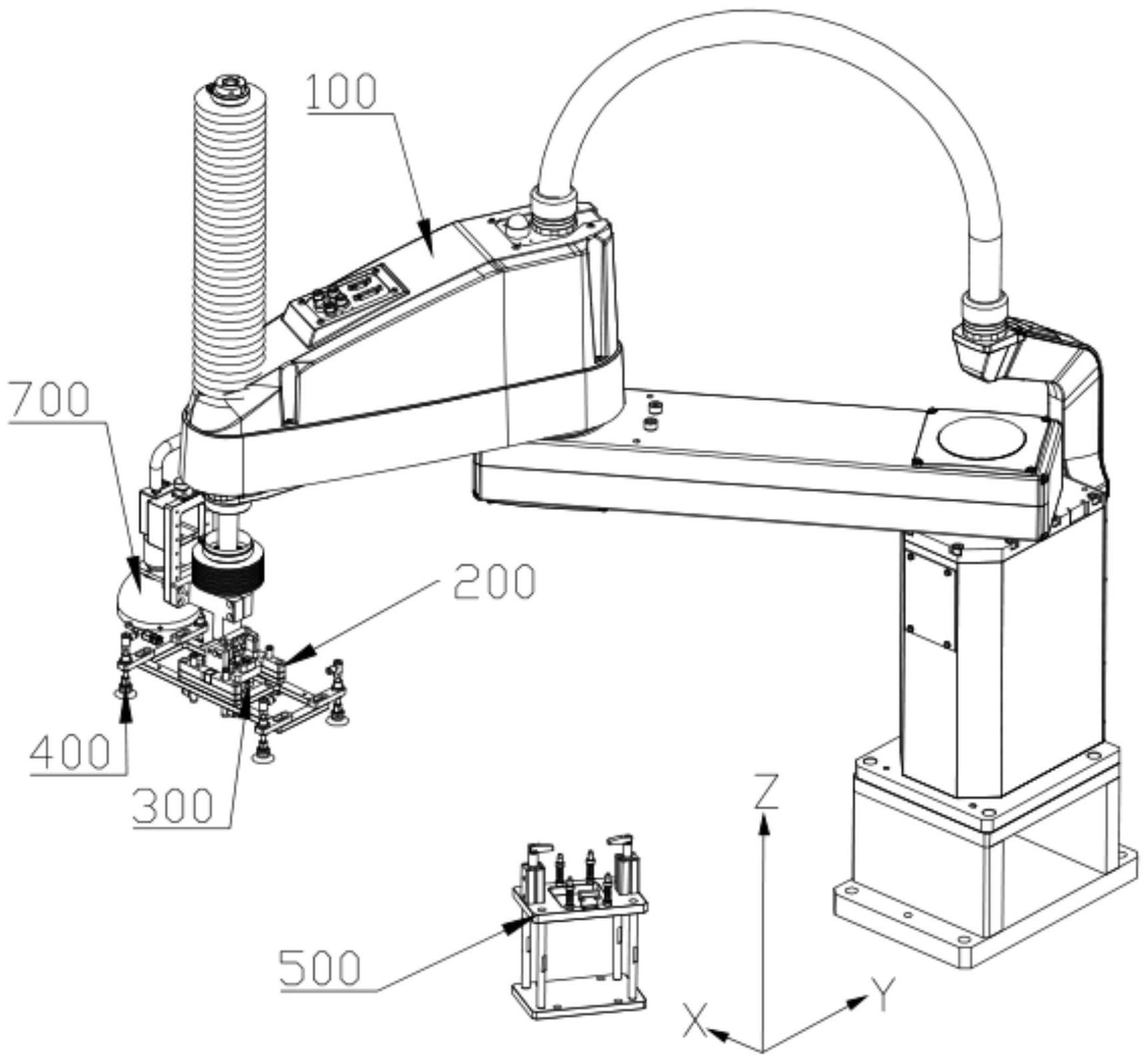
3、本发明提供一种多功能机械手,该多功能机械手包括:
4、机械手;
5、安装座,所述安装座设于所述机械手的工作端;
6、第一获取组件,所述第一获取组件包括:
7、第一获取底座,所述第一获取底座沿z方向滑动设于所述安装座;
8、第一弹性件,设于所述安装座和所述第一获取底座之间,用于向所述第一获取底座施加向下的力;
9、第一吸附件,所述第一吸附件设于所述第一获取底座,用于吸附第一工件;
10、第二获取组件,所述第二获取组件包括:
11、第二获取底座,所述第二获取底座选择性连接于所述安装座;
12、第二吸附件,所述第二吸附件设于所述第二获取底座,用于吸附第二工件。
13、在一些实施例中,所述第二获取底座和所述安装座二者中,一个为磁吸材质,另一个安装有磁吸件,所述第二获取底座和所述安装座通过磁吸件吸附;和/或
14、所述安装座设有定位孔,所述第二获取组件包括定位销,所述定位销能插接于所述定位孔中。
15、在一些实施例中,所述安装座设有磁铁槽,所述磁吸件设于所述磁铁槽中,所述磁吸件能吸附所述第二获取底座;和/或
16、所述安装座设有两个开口相背的导正槽,所述第二获取组件包括两个导正块,两个所述导正块均设于所述第二获取底座,且能分别插接于所述导正槽中。
17、在一些实施例中,所述第二获取组件包括第一垫高块和第二垫高块,所述第二垫高块的材质为磁吸材质,所述第一垫高块设于所述第二获取底座,所述第二垫高块设于所述第一垫高块远离所述第二获取底座的一侧,所述磁吸件能吸附所述第二垫高块。
18、在一些实施例中,所述多功能机械手包括支撑组件,所述支撑组件用于放置所述第二获取组件,所述支撑组件包括:
19、支撑座;
20、导向轴,所述导向轴的一端固定于所述支撑座;
21、导向滑套,所述导向滑套套设于所述导向轴;
22、第二弹性件,所述第二弹性件套设于所述导向轴,且两端分别抵接所述支撑座和所述导向滑套;
23、所述第二获取底座设有安装孔,所述安装孔套设于所述导向轴,且所述导向滑套的上端抵接所述第二获取底座。
24、在一些实施例中,所述支撑组件包括压载件,所述压载件包括旋转升降气缸和压载头,所述旋转升降气缸设于所述支撑座,所述压载头设于所述旋转升降气缸的输出端,所述压载头具有第一位置和第二位置,位于所述第一位置的所述压载头位于所述导正块的上侧,位于所述第二位置的所述压载头位于所述第二获取底座的旁边。
25、在一些实施例中,所述安装座设有第一通气孔,所述安装座上连接有第一气体接头,所述第一气体接头的一端与所述第一通气孔的一端连通,所述第二获取底座设有第二通气孔,所述第二通气孔的一端能与所述第一通气孔的另一端连通,所述第二获取底座的下侧连接有第二气体接头,所述第二气体接头的一端和所述第二通气孔的另一端连通,所述第二气体接头的另一端和所述第二吸附件连通。
26、在一些实施例中,所述安装座设有导向孔,所述第一获取组件包括导向杆和止挡件,所述导向杆的一端与所述第一获取底座连接,所述导向杆穿设于所述导向孔,所述导向杆的另一端与止挡件连接,所述止挡件的外径尺寸大于所述导向孔的外径尺寸。
27、在一些实施例中,所述多功能机械手还包括:
28、第一底座,所述第一底座设有第一调节孔和第一固定孔;所述第一底座设于所述机械手的输出端;
29、中转底座,所述中转底座设有沿x方向延伸的第一转轴和第一螺孔以及沿y方向延伸的第二转轴和第二螺孔;
30、第二底座,所述第二底座设有第二调节孔和第二固定孔;所述安装座安装于所述第二底座;
31、所述第一转轴穿设于所述第一调节孔,所述第一固定螺栓穿过所述第一固定孔并螺接于所述第一螺孔中;所述第二转轴穿设于所述第二调节孔,所述第二固定螺栓穿过所述第二固定孔并螺接于所述第二螺孔中;
32、所述x方向、所述y方向和所述z方向两两垂直。
33、在一些实施例中,所述第一固定孔为弧形孔,所述第一固定孔的圆心和所述第一转轴的圆心重合;和/或
34、所述第二调节孔为弧形孔,所述第二调节孔的圆心和所述第二转轴的圆心重合。
35、本发明的有益效果为:
36、本发明提供一种多功能机械手,该多功能机械手的工作端具有安装座,在安装座上安装第一获取组件以吸附第一工件,在安装座上安装第二获取组件以吸附第二工件;减少了组装设备中机械手的数量,成本低,且占用空间小。另外,由于第二获取组件的第二获取底座可以选择性的安装于安装座,使得在转移第一工件的过程中,安装座上不安装第二获取组件,从而使得多功能机械手的负载较小,降低使用成本并提高运动的灵活性。
技术特征:
1.一种多功能机械手,其特征在于,包括:
2.根据权利要求1所述的多功能机械手,其特征在于,所述第二获取底座(410)和所述安装座(200)二者中,一个为磁吸材质,另一个安装有磁吸件(250),所述第二获取底座(410)和所述安装座(200)通过磁吸件(250)吸附;和/或
3.根据权利要求2所述的多功能机械手,其特征在于,所述安装座(200)设有磁铁槽,所述磁吸件(250)设于所述磁铁槽中,所述磁吸件(250)能吸附所述第二获取底座(410);和/或
4.根据权利要求3所述的多功能机械手,其特征在于,所述第二获取组件(400)包括第一垫高块(450)和第二垫高块(460),所述第二垫高块(460)的材质为磁吸材质,所述第一垫高块(450)设于所述第二获取底座(410),所述第二垫高块(460)设于所述第一垫高块(450)远离所述第二获取底座(410)的一侧,所述磁吸件(250)能吸附所述第二垫高块(460)。
5.根据权利要求3所述的多功能机械手,其特征在于,所述多功能机械手包括支撑组件(500),所述支撑组件(500)用于放置所述第二获取组件(400),所述支撑组件(500)包括:
6.根据权利要求5所述的多功能机械手,其特征在于,所述支撑组件(500)包括压载件(550),所述压载件(550)包括旋转升降气缸和压载头,所述旋转升降气缸设于所述支撑座(510),所述压载头设于所述旋转升降气缸的输出端,所述压载头具有第一位置和第二位置,位于所述第一位置的所述压载头位于所述导正块(440)的上侧,位于所述第二位置的所述压载头位于所述第二获取底座(410)的旁边。
7.根据权利要求1所述的多功能机械手,其特征在于,所述安装座(200)设有第一通气孔(230),所述安装座(200)上连接有第一气体接头(240),所述第一气体接头(240)的一端与所述第一通气孔(230)的一端连通,所述第二获取底座(410)设有第二通气孔(411),所述第二通气孔(411)的一端能与所述第一通气孔(230)的另一端连通,所述第二获取底座(410)的下侧连接有第二气体接头(412),所述第二气体接头(412)的一端和所述第二通气孔(411)的另一端连通,所述第二气体接头(412)的另一端和所述第二吸附件(420)连通。
8.根据权利要求1所述的多功能机械手,其特征在于,所述安装座(200)设有导向孔,所述第一获取组件(300)包括导向杆(340)和止挡件(350),所述导向杆(340)的一端与所述第一获取底座(310)连接,所述导向杆(340)穿设于所述导向孔,所述导向杆(340)的另一端与止挡件(350)连接,所述止挡件(350)的外径尺寸大于所述导向孔的外径尺寸。
9.根据权利要求1-8任一项所述的多功能机械手,其特征在于,所述多功能机械手还包括:
10.根据权利要求9所述的多功能机械手,其特征在于,所述第一固定孔(612)为弧形孔,所述第一固定孔(612)的圆心和所述第一转轴(621)的圆心重合;和/或
技术总结
本发明涉及自动化装配技术领域,具体公开了一种多功能机械手,该多功能机械手中,安装座设于机械手的工作端;第一获取组件包括第一获取底座、第一弹性件和第一吸附件,其中,第一获取底座沿Z方向滑动设于安装座;第一弹性件设于安装座和第一获取底座之间,用于向第一获取底座施加向下的力;第一吸附件设于第一获取底座,用于吸附第一工件,第一吸附件吸附第一工件的上侧面;第二获取组件包括第二获取底座和第二吸附件,其中,第二获取底座选择性连接于安装座;第二吸附件设于第二获取底座,第二吸附件用于吸附第二工件。上述设置减少了组装设备中机械手的数量,成本低,且占用空间小。
技术研发人员:章登亮
受保护的技术使用者:博众精工科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!