焊接控制方法以及相关的汽车加工系统和存储介质与流程
本技术涉及到通信和智能制造,尤其涉及到焊接控制方法以及相关的汽车加工系统和存储介质。
背景技术:
1、汽车的不断变大,对于汽车焊装生产线也是一个不断挑战的过程。板件尺寸变大同时,意味着对应的生产设备也需要不断更新迭代。
2、在汽车的焊装生产线中,过去往往依靠人工深度参与对汽车整个车身的焊点进行焊接,虽然这种方法可在一定程度上保证焊接质量,但也大大增加了焊接时间和焊接成本,并且焊接本身也有害于工人的身体健康。目前,随着技术的进步,工业机械臂在汽车领域得到了长足的发展与广泛应用,其中焊接机械臂应用最为广泛,焊接机械臂的应用有效解决了工人作业时间长、劳动强度大和焊点质量不稳定等问题,提高了生产效率和产品质量。但是目前的焊接机械臂通常是固定在一个地方使用,焊接机械臂不能移动,这导致其焊接覆盖范围和灵活性都严重受限。
技术实现思路
1、本技术实施例提供汽车焊接机构和相关系统,针对现有技术焊接机械臂固定在一个地方使用而不能移动的问题,本技术实施例方案引入了配合焊接机械臂灵活转动的相关机构,这使得焊接机械臂可根据需要进行灵活转动,有利于增强焊接机械臂的焊接覆盖范围和灵活性。
2、本技术实施例第一方面提供一种汽车焊接机构,可包括:
3、转动控制器、基板、旋转支撑组件、旋转台本体、旋转伺服电机、平台放置架和至少1个焊接机械臂;
4、其中,旋转支撑组件和旋转台本体安装在基板上;
5、其中,所述平台放置架安装在所述旋转支撑组件上;
6、其中,所述旋转伺服电机用于在转动控制器的控制下带动所述旋转台本体转动;所述旋转台本体转动时能够带动所述平台放置架在所述旋转支撑组件上滑动旋转;
7、所述至少1个焊接机械臂固定在平台放置架之上,所述至少1个焊接机械臂包括第一焊接机械臂;
8、其中,
9、所述第一焊接机械臂,用于接收来自主控器的携带有焊接任务文件fn1的任务执行指令cotn1-1,所述焊接任务文件fn1携带任务标识tidn1-1,所述任务标识tidn1-1用于表示焊接任务tn1-1,运行所述焊接任务文件fn1以确定焊接任务tn1-1的焊接路径routn1-1,基于焊接路径routn1-1对第一汽车焊接件进行焊接,所述焊接路径routn1-1经过多个焊接元;
10、其中,
11、当所述焊接路径routn1-1上待焊接的焊接元un1的坐标超出所述第一焊接机械臂当前的最大焊接范围,所述第一焊接机械臂还用于,向所述转动控制器发送转动控制指令,所述转动控制指令用于指示所述转动控制器控制旋转伺服电机来带动所述旋转台本体转动,转动的旋转台本体带动所述平台放置架在所述旋转支撑组件上滑动旋转,进而使得所述焊接元un1的坐标能够落入到放置于平台放置架上的所述第一焊接机械臂当前的最大焊接范围之内。
12、可以看出,本技术实施例方案引入了转动控制器、旋转支撑组件、旋转台本体和旋转伺服电机等可配合焊接机械臂灵活转动的相关机构,这使得焊接机械臂可根据需要进行灵活转动,例如当第一焊接路径上待焊接的焊接元un1的坐标超出第一焊接机械臂当前的最大焊接范围,第一焊接机械臂还用于向转动控制器发送转动控制指令,所述转动控制指令用于指示所述转动控制器控制旋转伺服电机来带动所述旋转台本体转动,转动的旋转台本体带动所述平台放置架在所述旋转支撑组件上滑动旋转,进而使得所述焊接元un1的坐标能够落入到放置于平台放置架上的所述第一焊接机械臂当前的最大焊接范围之内,这样有利于增强焊接机械臂的焊接覆盖范围和灵活性。
13、在一些可能的实施方式中,所述汽车焊接机构还包括第一隔离板,所述第一隔离板安装在平台放置架之上,所述至少1个焊接机械臂还包括第二焊接机械臂,所述第一焊接机械臂和第二焊接机械臂被所述第一隔离板的隔开。
14、在一些可能的实施方式中,当焊接路径routetn1-1包括第一子路径和第二子路径,且所述第一子路径和所述第二子路径存在交叉点jx1,所述第一焊接机械臂还用于,向所述第二焊接机械臂发送第一焊接任务协同请求,所述第一焊接任务协同请求包含所述第二子路径所经过的焊接元的坐标集合,接收到所述第二焊接机械臂反馈的用于响应第一任务协同请求的第一任务协同请求响应,若所述第一任务协同请求响应携带第一同意协同标识,则所述第二焊接机械臂用于基于所述第二子路径对第一汽车焊接件进行焊接;所述第一焊接机械臂用于基于所述第一子路径对第一汽车焊接件进行焊接,其中,所述第一同意协同标识用于表示所述第二焊接机械臂同意基于所述第二子路径对第一汽车焊接件进行焊接。
15、在一些可能的实施方式中,所述第一子路径上至少50%的焊接元的坐标未超出所述第一焊接机械臂当前的最大焊接范围,所述第二子路径上至少50%的焊接元的坐标未超出所述第二焊接机械臂当前的最大焊接范围。
16、在一些可能的实施方式中,若第一任务协同请求响应携带第一不同意协同标识,则所述第一焊接机械臂用于分别基于所述第一子路径和第二子路径对第一汽车焊接件进行焊接,所述第一不同意协同标识用于表示所述第二焊接机械臂不同意基于所述第二子路径对第一汽车焊接件进行焊接。
17、在一些可能的实施方式中,若所述第一子路径和所述第二子路径的交叉点jx1为第二子路径的第一端点,且第一子路径和第二子路径的交叉点jx1不是第一子路径的任意一个端点,则所述第一焊接机械臂用于从第一子路径的任意一个端点开始,基于所述第一子路径对第一汽车焊接件进行焊接,所述第二焊接机械臂用于从第二子路径的第一端点开始来基于所述第二子路径对第一汽车焊接件进行焊接。
18、在一些可能的实施方式中,若所述第一子路径和所述第二子路径的交叉点jx1不是第二子路径的任意一个端点,且第一子路径和第二子路径的交叉点jx1不是第一子路径的任意一个端点,则第一焊接机械臂用于从第一子路径的第一端点开始,基于所述第一子路径对第一汽车焊接件进行焊接,所述第二焊接机械臂用于从第二子路径的第一端点开始,基于所述第二子路径对第一汽车焊接件进行焊接;
19、其中,
20、所述第一子路径的第一端点到交叉点jx1的长度,小于或等于所述第二子路径的第二端点到交叉点jx1长度,且所述第二子路径的第二端点到交叉点jx1长度,小于或等于所述第二子路径的第一端点到交叉点jx1长度;或所述第一子路径的第一端点到交叉点jx1的长度,大于或等于所述第二子路径的第二端点到交叉点jx1长度,且所述第二子路径的第二端点到交叉点jx1长度,大于或等于所述第二子路径的第一端点到交叉点x1长度。
21、在一些可能的实施方式中,
22、所述第一焊接机械臂还用于在当焊接到第一焊接路径上的焊接元un2时接收到了来自主控器的任务中断指令,停止执行所述焊接任务tn1-1,并在所述焊接任务文件fn1中标记焊接任务tn1-1的任务中断点dx1,其中,所述任务中断点dx1用于指示出焊接元un2,向主控器反馈任务中断指令响应,所述任务中断指令响应中携带标记了任务中断点dx1的焊接任务文件fn1。
23、所述第一焊接机械臂还用于,在接收到携带焊接任务文件fn1的焊接任务执行指令cotn1-2之后,从焊接任务文件fn1中标记的任务中断点dx1所指示的焊接元un2开始,继续基于第一焊接路径对第一汽车焊接件进行焊接,进而从任务中断点dx1所指示的焊接元un2开始继续执行焊接任务tn1-1。
24、在一些可能的实施方式中,
25、所述第一焊接机械臂还用于,在当第一焊接机械臂焊接到第一子路径上的焊接元un2,且第二焊接机械臂焊接到第二子路径上的焊接元un3时接收到了来自主控器的任务中断指令,停止执行所述焊接任务tn1,并在所述焊接任务文件fn1中标记任务中断点dx1,其中,所述任务中断点dx1用于指示出焊接元un2和焊接元un3,向主控器反馈任务中断指令响应,所述任务中断指令响应中携带标记了任务中断点dx1的焊接任务文件fn1。
26、所述第一焊接机械臂还用于,在接收到携带焊接任务文件fn1的焊接任务执行指令cotn1-2之后,从焊接任务文件fn1中标记的任务中断点dx1所指示的焊接元un2开始,继续基于第一子路径对第一汽车焊接件进行焊接;并向所述第二焊接机械臂发送第二焊接任务协同请求,所述第二焊接任务协同请求包含第二子路径中从焊接元un3开始的未完成焊接的各焊接元的坐标,接收到所述第二焊接机械臂反馈的第二任务协同请求响应,若所述第一任务协同请求响应携带第二同意协同标识,则所述第二焊接机械臂用于从焊接任务文件fn1中标记的任务中断点dx1所指示的焊接元un3开始,继续基于所述第二子路径对第一汽车焊接件进行焊接,第二同意协同标识用于表示所述第二焊接机械臂同意继续基于所述第二子路径对第一汽车焊接件进行焊接。
27、在一些可能的实施方式中,若所述第二任务协同请求响应携带第二不同意协同标识,则所述第一焊接机械臂还用于,在从焊接任务文件fn1中标记的任务中断点dx1所指示的焊接元un2开始,继续基于第一子路径对第一汽车焊接件进行焊接之后,再从焊接任务文件fn1中标记的任务中断点dx1所指示的焊接元un3开始,接替第二焊接机械臂来继续基于所述第二子路径对第一汽车焊接件进行焊接,其中,第二不同意协同标识用于表示所述第二焊接机械臂不同意继续基于所述第二子路径对第一汽车焊接件进行焊接。
28、在一些可能的实施方式中,主控器可能发起某焊接任务的中断流程,发起中断流程的具体原因可能是因为收到了优先级更高的焊接任务,或也可能是由于其它突发情况导致必须进行中断。通过标记任务中断点,可以在后续很好的接续被中断的焊接任务。
29、在一些可能的实施方式中,所述焊接任务文件fn1还携带有用于表示的焊接任务tn1-2的任务标识tidn1-2,所述第一焊接机械臂还用于运行所述焊接任务文件fn1以确定焊接任务tn1-2的焊接路径routn1-2,所述焊接路径routn1-2和所述焊接路径routn1-1无交叉点,其中,所述焊接任务文件fn1还携带同步焊接标识,所述同步焊接标识用于指示焊接路径分段routn1-11和焊接路径分段routn1-21需要同步焊接,其中,所述焊接路径分段routn1-11属于焊接路径routn1-1,所述焊接路径分段routn1-21属于焊接路径routn1-2。
30、其中,所述至少1个焊接机械臂还包括第三焊接机械臂。
31、所述第一焊接机械臂还用于,向所述第三焊接机械臂发送第三焊接任务协同请求,其中,所述第三焊接任务协同请求包含所述焊接路径routn1-2所经过的焊接元的坐标集合,所述第三焊接任务协同请求还包含同步焊接标识,接收到所述第三焊接机械臂反馈的用于响应第三任务协同请求的第三任务协同请求响应,若所述第三任务协同请求响应携带第三同意协同标识,则所述第三焊接机械臂用于基于所述焊接路径routn1-2对第一汽车焊接件进行焊接,第三同意协同标识可用于表示所述第二焊接机械臂同意基于所述焊接路径routn1-2对第一汽车焊接件进行焊接,并且同意对焊接路径分段routn1-11和焊接路径分段routn1-21进行同步焊接。
32、其中,所述第一焊接机械臂还用于,当焊接到了焊接路径分段routn1-11的起点时暂停焊接,在向所述第三焊接机械臂发送同步焊接指令的同时启动第一同步焊接定时器。
33、所述第三焊接机械臂用于在接收到同步焊接指令之后,启动第二同步焊接定时器,并向所述第一焊接机械臂反馈同步焊接指令响应;第二同步焊接定时器和第一同步焊接定时器的定时时长相同。
34、所述第一焊接机械臂还用于在接收到所述第三焊接机械臂反馈的同步焊接指令响应之后,当第一同步焊接定时器到达时,从焊接路径分段routn1-11的起点开始继续基于焊接路径routn1-1对第一汽车焊接件进行焊接。
35、其中,所述第三焊接机械臂还用于当第二同步焊接定时器到达时,从焊接路径分段routn1-21的起点开始基于焊接路径routn1-2对第一汽车焊接件进行焊接。
36、可以看出,上述举例的技术方案给出了两个焊接机械臂协同进行同步焊接的机制,有利于更灵活的满足多样化的焊接需求。
37、在一些可能的实施方式中,第一方面提供的任意一种汽车焊接机构可应用于重载回转机构的切换控制装置。
38、本申实施例第二方面提供一种重载回转机构的切换控制装置。
39、其中,重载回转机构的切换控制装置可包括:滑轨组、伺服电机组、汽车焊接机构和主控器;所述伺服电机组和主控器通信连接,所述汽车焊接机构和主控器通信连接。
40、所述滑轨组包括:x方向滑轨、y方向滑轨;所述伺服电机组包括x方向伺服电机和y方向伺服电机;所述x方向伺服电机能够驱动汽车焊接机构在x方向滑轨上移动;所述y方向伺服电机能够驱动汽车焊接机构在y方向滑轨上移动,所述滑轨组用于对接n个车型加工位;不同的车型加工位能够通过不同的工位标识来区别标识,所述n为大于1的整数。
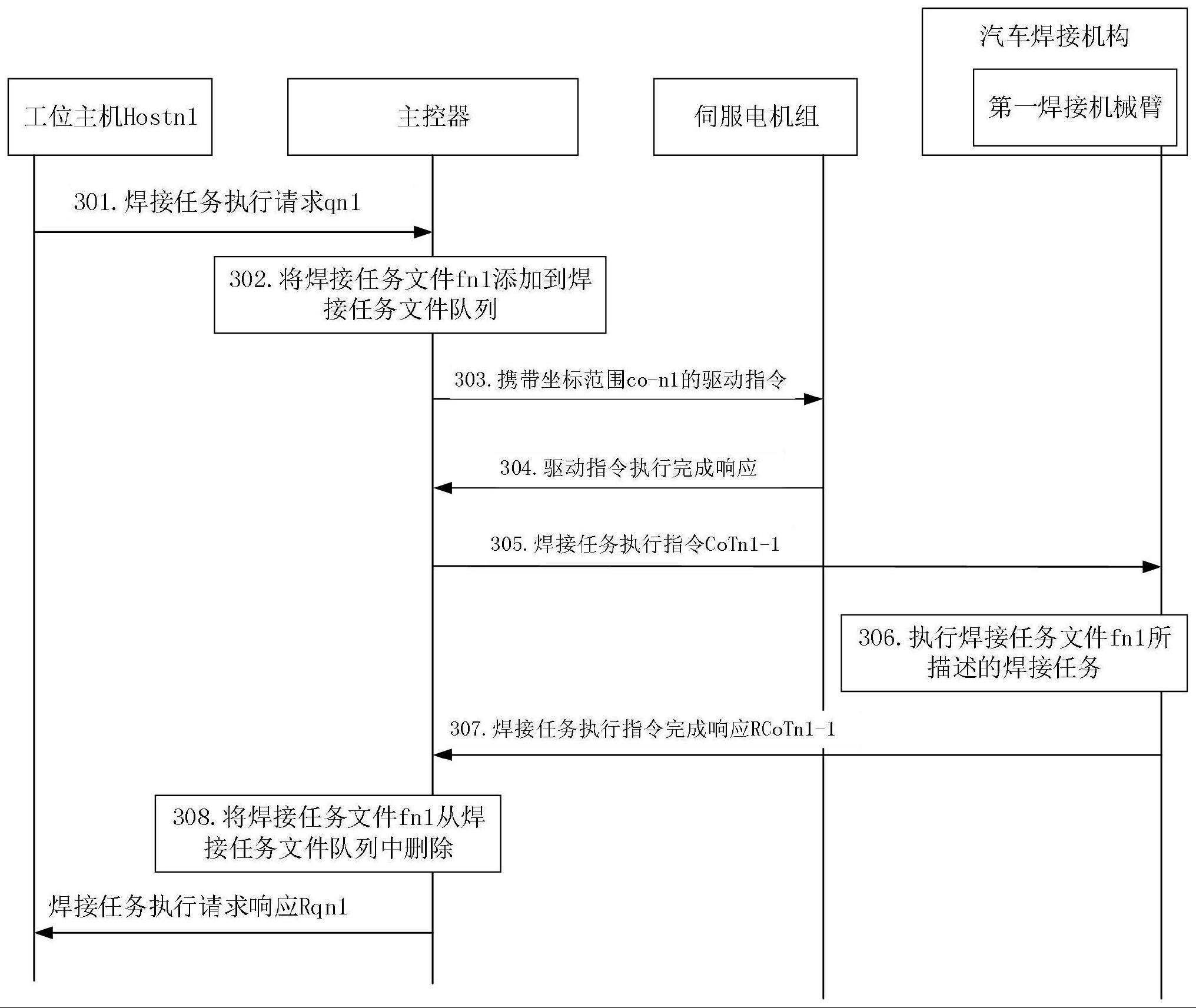
41、其中,所述主控器,用于在接收到来自工位主机hostn1的携带有焊接任务文件fn1的焊接任务执行请求qn1之后,将所述焊接任务文件fn1添加到焊接任务文件队列中,其中,所述焊接任务文件fn1包含有工位标识pro-n1和任务标识tidn1-1,所述工位主机hostn1归属于所述n个车型加工位中所述工位标识pro-n1所表示的车型加工位。
42、所述主控器还用于,当检测到焊接任务文件fn1位于所述焊接任务文件队列的队首时(例如并且焊接任务文件队列当前不存在处于运行状态的其它焊接任务文件),在已缓存的工位标识与坐标范围映射表中查找与所述工位标识pro-n1匹配的映射记录,当查找到了映射记录pn1,则读取出所述映射记录pn1中记载的所述工位标识pro-n1所表示的车型加工位的坐标范围co-n1,向所述伺服电机组发送携带坐标范围co-n1的驱动指令。
43、所述伺服电机组用于在接收携带坐标范围co-n1的驱动指令后,驱动所述汽车焊接机构在所述y方向滑轨上移动和/或在所述x方向滑轨上移动,以使得所述汽车焊接机构移动到所述坐标范围co-n1;当所述汽车焊接机构移动到所述坐标范围co-n1之后,向所述主控器反馈驱动指令执行完成响应,所述驱动指令执行完成响应用于指示所述汽车焊接机构已移动到所述坐标范围co-n1。
44、所述主控器还用于,在接收到所述驱动指令执行完成响应后,从焊接任务文件队列中读取出焊接任务文件fn1,向所述汽车焊接机构下发焊接任务执行指令cotn1-1,所述焊接任务执行指令cotn1-1携带有焊接任务文件fn1。
45、所述汽车焊接机构为第一方面提供的任意一种汽车焊接机构。
46、本技术实施例第三方面提供一种汽车加工产线系统,可包括:n个车型加工位和第二方面提供的重载回转机构的切换控制装置。
47、其中,所述n个车型加工位中的每个加工位分别包括工位主机,所述工位主机用于向重载回转机构的切换控制装置发送携带有焊接任务文件的焊接任务执行请求。
48、可以看出,本技术实施例一些方案中,在汽车加工产线系统中引入了重载回转机构的切换控制装置,切换控制装置可根据车型加工位的工位主机发起的焊接任务来调度汽车焊接机构执行相关焊接任务,且多个车型加工位可以共享一个汽车焊接机构。相对于现有技术不同车型的汽车生产线分别配备独立且功能相同的汽车焊接机构的方案,本技术实施例方案引入了汽车焊接机构在多个车型加工位(车型加工位是汽车生产线的一个核心单元)之间的高效自动化共享机制,这样有利于提高汽车焊接机构的利用效率,且引入汽车焊接机构的多个车型加工位共享机制,有利于降低汽车加工产线的占地面积和投资成本,且可提高汽车加工产线的自动化效率等,有利于实现高效的生产管理。
- 还没有人留言评论。精彩留言会获得点赞!