一种基于钢丝绳负载变化的主轴箱伺服补偿方法与流程
本发明涉及数控落地铣镗床主轴箱平衡调整,具体涉及一种基于钢丝绳负载变化的主轴箱伺服补偿方法。
背景技术:
1、目前,数控落地铣镗床布局方式是镗杆、滑枕或镗杆采用水平布置在主轴箱内,主轴箱通过前后两根钢丝绳和平衡锤相连的侧挂结构形式,受移动件自身重量的影响,不可避免的镗轴及滑枕或镗杆在伸出时,会打破主轴箱的平衡从而影响机床运行精度,所以主轴箱平衡补偿系统一直是落地式铣镗床提高精度的重要关键技术。目前广泛使用的补偿方法是在钢丝绳的前吊点或后吊点与主轴箱连接之间增加油缸,通过控制油缸的行程来保持主轴箱的动态平衡。液压油缸补偿存在以下问题:进油管直径远小于缸体直径,造成缸体内油量的调整需要一定时间,因此在调整上存在滞后性。液压油本质上是液体,液体有一定的弹性体,是可压缩的。所以,在向油缸注油增压时,油缸体内需补充比理论上更多的油量,才能增加到设定压力;在油缸泄油减压时,油缸体内需泄漏比理论上更多的油量,才能减小到设定压力。这样都将造成油缸调整时,存在更长时间上的滞后。
技术实现思路
1、根据现有技术的不足,本发明的目的是提供一种基于钢丝绳负载变化的主轴箱伺服补偿方法,方法简单,能实现自动调整补偿,反应快,可满足落地式铣镗床主轴箱平衡的实时调节,进而满足主轴箱的精度要求。
2、为了解决上述技术问题,本发明采用的技术方案为:
3、一种基于钢丝绳负载变化的主轴箱伺服补偿方法,包括以下步骤:
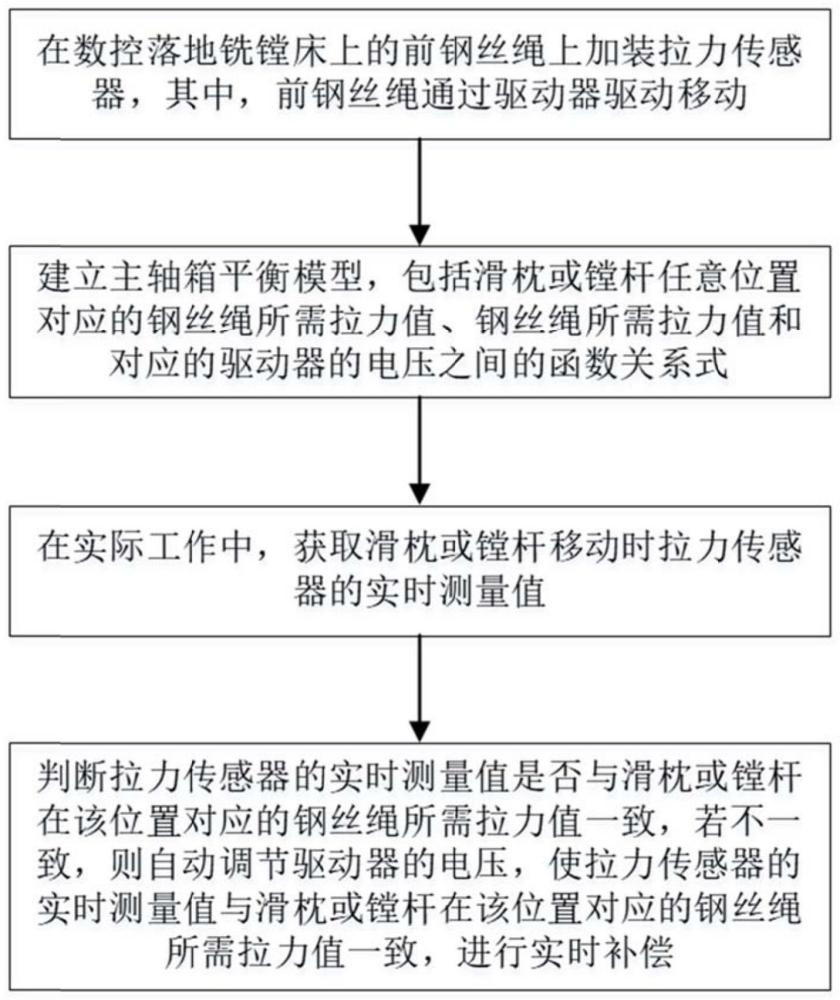
4、在数控落地铣镗床上的前钢丝绳上加装拉力传感器,其中,前钢丝绳通过驱动器驱动移动;
5、建立主轴箱平衡模型,包括滑枕或镗杆任意位置对应的钢丝绳所需拉力值、钢丝绳所需拉力值和对应的驱动器的电压之间的函数关系式;
6、在实际工作中,获取滑枕或镗杆移动时拉力传感器的实时测量值;
7、判断拉力传感器的实时测量值是否与滑枕或镗杆在该位置对应的钢丝绳所需拉力值一致,若不一致,则自动调节驱动器的电压,使拉力传感器的实时测量值与滑枕或镗杆在该位置对应的钢丝绳所需拉力值一致,进行实时补偿。
8、进一步地,所述驱动器包括伺服电机、减速箱和滚珠丝杠机构,所述滚珠丝杠机构包括丝杠螺母和丝杠,丝杠与前钢丝绳固定,伺服电机的输出轴和减速箱相连,减速箱的输出轴与丝杠螺母固定。
9、进一步地,所述数控落地铣镗床还包括数控系统ncu、驱动模块smm、和plc模拟量输入模块;
10、所述plc模拟量输入模块用于读取拉力传感器测量的实时测量值;
11、所述主轴箱平衡模型内嵌在数控系统ncu中,计算出滑枕或镗杆的位置与对应的钢丝绳所需拉力值、钢丝绳所需拉力值和对应的驱动器的电压;
12、驱动模块smm用于驱动伺服电机工作。
13、进一步地,所述拉力传感器将测量的实时测量值转化为电压信号,所述plc模拟量模块通过d/a转换把采集到的电压信号转换成数字量信号进行读取。
14、进一步地,所述滑枕或镗杆的位置是数控系统ncu通过位置传感器获取。
15、进一步地,将滑枕或镗杆在主轴箱内的行程平均分为n个区域,每个区间的距离为δz,每个区域的起点位置为zn,每个区域的终点位置为zn+1,δz=zn+1-zn,滑枕或镗杆在zn钢丝绳的拉力为nn,滑枕或镗杆在zn+1钢丝绳的拉力为nn+1;
16、滑枕或镗杆在zn和zn+1之间钢丝绳的拉力变化δnn=nn+1-nn;
17、滑枕或镗杆在任意位置zp为控制主轴箱的动态平衡,钢丝绳所需拉力值nz的表达式为:
18、nz=nn+(zp-zn)*δnn/δz=nn+(zp-zn)*(nn+1-nn)/(zn+1-zn)。
19、进一步地,拉力传感器把钢丝绳的拉力n转换成模拟量0-10v的电压信号,滑枕或镗杆在zn钢丝绳的拉力nn对应电压为vn,滑枕或镗杆在zn+1钢丝绳的拉力nn+1对应电压为vn+1,滑枕或镗杆在zn和zn+1之间钢丝绳的拉力变化δnn对应电压变化为δvn,则滑枕或镗杆在任意位置zp时钢丝绳所需拉力值nz对应的驱动器的电压vz的表达式为:
20、vz=vn+(zp-zn)*δvn/δz=vn+(zp-zn)*(vn+1-vn)/(zn+1-zn)。
21、进一步地,滑枕或镗杆在主轴箱内作直线运动。
22、与现有技术相比,本发明具有以下优点和有益效果:
23、本发明提供的一种基于钢丝绳负载变化的主轴箱伺服补偿方法,基于前钢丝绳负载变化的主轴箱动态平衡伺服补偿方法,滑枕或镗杆在主轴箱内移动自动监测前钢丝绳负载拉力变化,然后根据主轴箱平衡模型的函数计算,获取滑枕或镗杆的位置与对应的钢丝绳所需拉力值、钢丝绳所需拉力值和驱动器的电压,进而通过驱动器驱动前钢丝绳移动,调整前钢丝绳的负载拉力,使拉力传感器的实时测量值与滑枕或镗杆在该位置对应的钢丝绳所需拉力值一致,最终目的是对主轴箱平衡实现补偿,使主轴箱达到动态平衡。
技术特征:
1.一种基于钢丝绳负载变化的主轴箱伺服补偿方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于钢丝绳负载变化的主轴箱伺服补偿方法,其特征在于:
3.根据权利要求2所述的基于钢丝绳负载变化的主轴箱伺服补偿方法,其特征在于:
4.根据权利要求3所述的基于钢丝绳负载变化的主轴箱伺服补偿方法,其特征在于:
5.根据权利要求3所述的基于钢丝绳负载变化的主轴箱伺服补偿方法,其特征在于:
6.根据权利要求1所述的基于钢丝绳负载变化的主轴箱伺服补偿方法,其特征在于:
7.根据权利要求1所述的基于钢丝绳负载变化的主轴箱伺服补偿方法,其特征在于:
8.根据权利要求1所述的基于钢丝绳负载变化的主轴箱伺服补偿方法,其特征在于:
技术总结
本发明提供一种基于钢丝绳负载变化的主轴箱伺服补偿方法,包括在数控落地铣镗床上的前钢丝绳上加装拉力传感器,其中,前钢丝绳通过驱动器驱动移动,建立主轴箱平衡模型,包括滑枕或镗杆任意位置对应的钢丝绳所需拉力值、钢丝绳所需拉力值和对应的驱动器的电压之间的函数关系式,在实际工作中,获取滑枕或镗杆移动时拉力传感器的实时测量值,判断拉力传感器的实时测量值是否与滑枕或镗杆在该位置对应的钢丝绳所需拉力值一致,若不一致,则自动调节驱动器的电压,使拉力传感器的实时测量值与滑枕或镗杆在该位置对应的钢丝绳所需拉力值一致,进行实时补偿,本发明,方法简单,能实现自动调整补偿,反应快,可满足落地式铣镗床主轴箱平衡的实时调节,进而满足主轴箱的精度要求。
技术研发人员:陈昳,江金华,张雪梅,杨笑风,雷学平,丁少博,徐黎明,许刚,郑丹
受保护的技术使用者:武汉重型机床集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!