一种智能制造的建筑用一体化套丝机的制作方法
本发明涉及建筑用套丝机,特别涉及一种智能制造的建筑用一体化套丝机。
背景技术:
1、在建筑施工中,通过智能控制的套丝机在建筑施工中应用的更加广泛,套丝机能够在柱状或管状的金属材料表面开设螺纹,从而将基本的金属管件加工成为可以进行机械连接的部件,就需要用到一种智能制造的建筑用一体化套丝机,专利号为cn110181129b的中国专利公开了一种建筑工程水管安装用套丝机,包括底座、固定座一、电机一、主动齿轮、内孔、活动套体、从动齿轮、连接套、凸起、卡槽、锁紧螺钉、板牙、外螺纹套、卡孔、固定盖体、固定座二、固定套、固定孔、固定螺钉、弹性卡套、活动板、水管、连接孔、紧固螺钉、导块、导孔、电磁铁、活动座、导槽、螺杆和电机二;所述固定座一底部固定连接在底座左上侧,所述固定座一左侧中央固定连接有电机一;所述电机一右侧输出轴端上固定连接有主动齿轮;所述内孔为数个,所述内孔呈圆形排列且横向设在固定座一中。
2、然而现有的建筑管道用一体化套丝机在使用时存在一些弊端,比如:
3、首先将数个水管分别插入到对应的连接孔和弹性卡套中,同时使水管左侧伸出的长度相同,而后给电磁铁通电带动导块左移,而导块的左移则带动活动板左移压紧所有的弹性卡套,也就能够同时对设有的水管进行夹紧,而后启动电机一和电机二,这里的电机一能够通过主动齿轮带动所有的从动齿轮一起旋转,而从动齿轮的旋转则带动活动套体及其内部的板牙旋转,完成套丝,但是在实际使用过程中,在水管被夹紧后,无法保证水管的中轴线与板牙转动轴的中轴线重合,同时对于不同尺寸的水管,无法保证板牙始终与水管内壁贴合完成套丝,最终造成部分区域内套丝深度较深,部分区域内套丝深度较浅甚至没有套丝,造成套丝结果不精确,为此,我们提出一种智能制造的建筑用一体化套丝机。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种智能制造的建筑用一体化套丝机,以解决现有的建筑管道用一体化套丝机套丝结果不精确的问题。
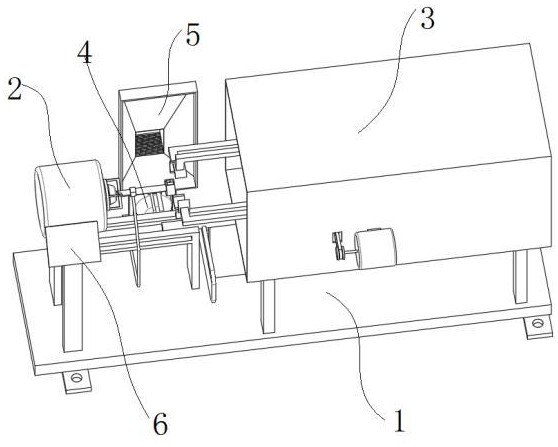
2、基于上述目的,本发明提供了一种智能制造的建筑用一体化套丝机,包括套丝机装置以及用于控制所述套丝机装置的控制系统,所述套丝机装置包括工作板,所述工作板上设有切割组件、夹持组件、驱动组件、碎屑收集组件以及智能组件,所述驱动组件包括设置在所述工作板上的驱动气泵,所述驱动气泵出气端用于驱动所述切割组件横向滑动,所述驱动气泵同时用于驱动所述碎屑收集组件收集碎屑,所述智能组件包括设置在所述切割组件中轴线上的工业相机以及设置在夹持组件上的四个采样标记点;
3、所述控制系统包括输入模块、检测模块以及驱动模块;所述检测模块用于检测待套丝的管道被所述夹持组件夹持限定后的中轴线是否与所述切割组件的中轴线重合,若重合,则生成第一指令,若不重合,则生成第二指令,所述驱动模块接收第一指令并驱动所述驱动组件以及所述切割组件完成套丝工作,所述驱动模块接收第二指令发出管道不匹配提醒。
4、进一步地,所述智能组件包括设置在所述工作板上的液晶触摸屏,所述输入模块通过液晶触摸屏用于输入待套丝管道的管道口径以及需要被套丝的套丝长度,所述液晶触摸屏还用于显示管道不匹配提醒。
5、进一步地,待套丝管道放入所述夹持组件内部,并完成夹持组后,所述检测模块通过所述工业相机拍摄检测图像,检测图像中包括管道端口以及四个所述采样标记点,所述检测模块对检测图像进行处理,首先识别管道端面像素点坐标,并求出管道端面中心原点,然后求出四个采样标记点成像的中心坐标,判断四个采样标记点成像的中心坐标距离管道端面中心原点的距离是否相等,若相等,则判断为待套丝的管道被所述夹持组件夹持限定后的中轴线是与所述切割组件的中轴线重合,则生成第一指令,反之则生成第二指令。
6、进一步地,所述夹持组件包括设置在所述工作板上的壳体,所述壳体顶壁设有第一滑轨,所述壳体侧壁设有第二滑轨,所述第一滑轨内部活动设有两个第一齿轮杆,所述第二滑轨内部活动设有两个第二齿轮杆,两个所述第一齿轮杆以及两个所述第二齿轮杆尺寸相同齿牙大小相同,两个所述第一齿轮杆中部啮合有第一驱动齿轮,两个所述第二齿轮杆中部啮合有第二驱动齿轮,所述第一驱动齿轮与所述第二驱动齿轮尺寸相同,齿牙数相同,两个所述第一齿轮杆端部连接有第一夹持杆,两个所述第二齿轮杆端部连接有第二夹持杆,所述第一夹持杆两端设有第一夹持圈,所述第二齿轮杆两端部连接有第二夹持圈,所述第一夹持圈以及所述第二夹持圈关于所述切割组件中轴线中心对称分布,两个所述第一夹持杆以及两个所述第二夹持杆同时向中部同速靠拢。
7、进一步地,所述壳体端部设有槽体,所述槽体端部与所述第一夹持圈以及所述第二夹持圈对齐,四个所述采样标记点分别设置在两个所述第一夹持杆以及两个所述第二夹持杆端部侧壁上,四个所述采样标记点关于所述切割组件中轴线中心对称分布。
8、进一步地,所述壳体外壁上设有驱动电机,所述驱动电机输出端设有第一传动齿轮,所述壳体内壁上设有三个第二传动齿轮,所述驱动电机通过所述第一传动齿轮、三个所述第二传动齿轮以及链条驱动所述第一驱动齿轮以及所述第二驱动齿轮同步同速转动。
9、进一步地,所述切割组件包括设置在所述工作板一端的龙门轨道,所述龙门轨道内部活动设有滑块,所述滑块上端设有套丝电机,所述套丝电机输出端设有驱动轴,所述驱动轴端部设有安装块,所述安装块内部活动设有伸缩柱,所述伸缩柱端部设有刀头,所述切割组件的中轴线为所述驱动轴的中轴线。
10、进一步地,所述驱动组件包括设置在所述工作板上的气泵、安装在所述龙门轨道中部的第一气压伸缩杆以及安装在所述安装块内部第二气压伸缩杆,所述驱动轴内部嵌设有导气管道,所述导气管道一端与所述第二气压伸缩杆连接,所述导气管道另一端与所述驱动轴另一端侧壁对齐,所述驱动轴上套设有转动壳,所述转动壳与所述导气管道之间设有油封,所述转动壳上贯通连接有第一气管,所述第一气压伸缩杆端部贯通连接有第二气管,所述第一气管端部以及所述第二气管端部均匀所述气泵出气口连接。
11、进一步地,所述碎屑收集组件包括设置在所述工作板上的收集罩,所述收集罩端部贯通连接有进气管,所述进气管与所述气泵进气口连接,所述收集罩端部活动设有收集抽屉,所述收集抽屉下表面呈网状结构。
12、进一步地,所述套丝电机输出端设有安装板,所述工业相机安装在所述安装板上,所述安装板上连接有四个连接条,四个所述连接条均与水平面夹角为45°,四个所述连接条端部与所述驱动轴端部连接,所述工业相机中心点位于所述驱动轴的中轴线上。
13、与现有技术相比,本发明具有如下有益效果:
14、本发明中,首先检测管道端面是否为原型端面,且管道侧壁与夹持组件是否全部贴合,再判断四个采样标记点成像的中心坐标距离管道端面中心原点的距离是否相等,通过进行图像分隔,然后给像素点惊醒坐标化,每个像素点对应一个坐标点,使得本发明通过对检测图像进行处理,能够精确判断待套丝的管道被夹持组件夹持限定后的中轴线是否与切割组件的中轴线重合,通过对检测图像进行数字图像处理保证了管道中轴线以及切割组件中轴线是否对齐,使得在进行套丝过程中,保证刀头始终与水管内壁贴合完成套丝,使得套丝更加均匀,最终使得套丝结果更加精确。
15、本发明中,切割组件位于所述夹持组件一侧,切割组件主要用于完成套丝工作,由于驱动组件能够同时给切割组件以及碎屑收集组件提供动力,大大节约资源,通过设置碎屑收集组件能够更好的收集切割组件刮削下的碎屑丝。
16、本发明中,驱动两个第一夹持杆以及两个第二夹持杆同步同速向中部靠拢,最终驱动两个第一夹持圈以及两个第二夹持圈同步同速向中部靠拢,完成夹持管道,且不会出现管道偏差。
- 还没有人留言评论。精彩留言会获得点赞!