一种配置工业机器人的柔性恒力装置的制作方法
本发明发明涉及工业自动化和机器人打磨去毛刺以及装配领域,具体是一种配置工业机器人的柔性恒力装置。
背景技术:
1、在零件装配、薄板件打磨等行业,传统的作业方式是人工操作,需要大量的人力资源,成本较高,并且作业的质量往往依赖于工人的经验和熟练程度,并不能保证质量完全一致。随着科技的发展,劳动强度大,对人员技能要求高、工作环境恶劣,甚至严重影响操作人员身体健康的岗位,正逐步被自动化设备所取代,工业机器人以灵活性好,工作空间大,控制简单等优势逐渐得到各大企业的青睐,作业专机也因其编程简单,成本低廉活跃在市场上。
2、工业机器人在生产作业中力控制是靠调节工业机器人的各个关节力矩来实现末端输出力,这种方法需建立准确的机器人运动学模型,根据末端输出力反解出工业机器人各个关节的输出力矩,且工业机器人末端姿态多种多样,更加造成了这种运算的复杂性,故其实现起来比较麻烦。而若是在机器人末端附加外部柔性恒力装置,工业机器人负责位置控制,力控装置负责末端输出力控制,两者相互结合实现工业机器人的精准应用,从而在自动化装配和薄板件打磨行业中能快速应用,解决了在打磨薄板件时,不会因为接触力过大而造成产品变形,同时在自动化装配过程中,克服因过度挤压而造成不良品等难题,提高工作效率和产品质量。
技术实现思路
1、本发明的目的是提供一种配置工业机器人的柔性恒力装置,本发明的目的是克服上述背景技术中的不足,提供一种柔性恒力装置,该机构主要包含位移传感器、倾角传感器、压力传感器、电气比例调压阀、低阻力气缸模块、滑轨滑块以及上下盖板与主体框架系统组成,具有自动化集成度高、结构简单以及工作可靠的特点,能够有效提高生产效率、提升产品质量、降低生产成本的问题。
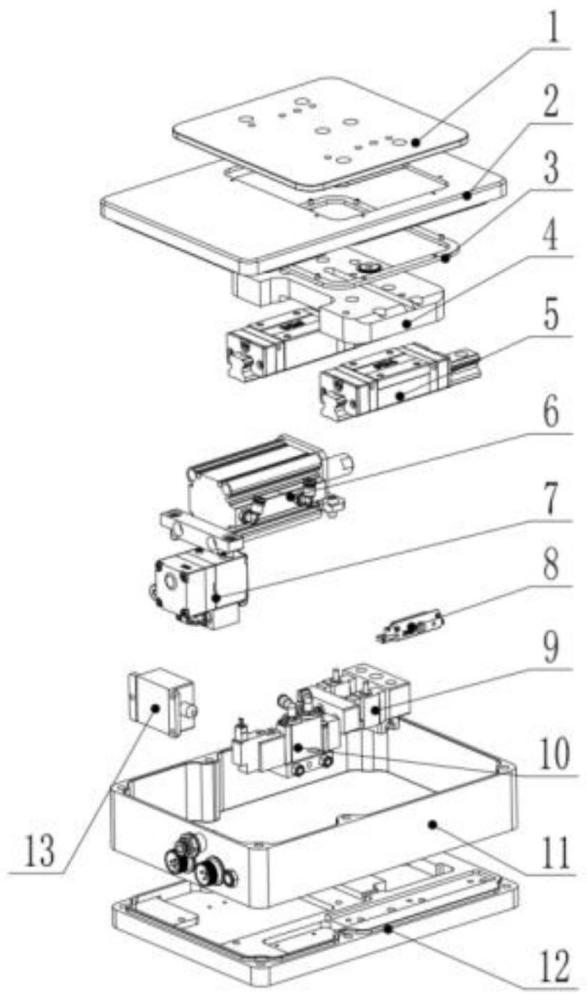
2、本发明解决其技术问题所采用的技术方案是:一种配置工业机器人的柔性恒力装置,包括主体控制连接框架结构以及设在主体控制连接框架结构中的内置柔性恒力控制部件,所述的主体控制连接框架结构包括末端执行机构安装与末端工具安装板、主体外壳框架、上盖板以及下盖板,所述的内置柔性恒力控制部件包括设在主体外壳框架中的主控浮动控制结构、连接主控浮动控制结构的传感器组件,所述的主控浮动控制结构包括一组滑轨滑块组件、设置在2个滑轨滑块组件之间低阻力气缸组件、连接在2个滑轨滑块组件下部的电气比例调节阀以及电磁阀。
3、所述的传感器组件包括包括反馈实时位置数据的位移传感器、反馈实时接触力的压力传感器以及提供设备角度实时监测数据的倾角传感器。
4、所述的滑轨滑块组件上部与过渡板连接,过渡板上部与末端工具安装板连接。
5、所述的过渡板与上盖板之间设置密封圈。
6、所述的倾角传感器型号为:lvt426t、位移传感器型号为mps-032tstp0、压力传感器的型号为:bsls-1、电磁阀型号为:sy5120-5mz-01电气比例调压阀型号为:101b-pre1。
7、本发明的有益效果是:本发明结构设计合理、安装方便,将压力传感器、倾角传感器、位移传感器集成在一起,配合电气比例调压阀控制低阻力气缸模块,可实现任何角度方向上的恒力精准输出。位移传感器反馈位置数据,倾角传感器提供设备角度实时监测数据,压力传感器反馈实时压力,电气比例调压阀控制低阻力气缸组件,使得在打磨或是在装配过程中接触力可控,同时本结构简单,生产制造成本低,易于后期维护保养。
8、以下将结合附图和实施例,对本发明进行较为详细的说明。
技术特征:
1.一种配置工业机器人的柔性恒力装置,包括主体控制连接框架结构以及设在主体控制连接框架结构中的内置柔性恒力控制部件,所述的主体控制连接框架结构包括末端执行机构安装与末端工具安装板、主体外壳框架、上盖板以及下盖板,所述的内置柔性恒力控制部件包括设在主体外壳框架中的主控浮动控制结构、连接主控浮动控制结构的传感器组件,所述的主控浮动控制结构包括一组滑轨滑块组件、设置在2个滑轨滑块组件之间低阻力气缸组件、连接在2个滑轨滑块组件下部的电气比例调节阀以及电磁阀。
2.所述的传感器组件包括包括反馈实时位置数据的位移传感器、反馈实时接触力的压力传感器以及提供设备角度实时监测数据的倾角传感器。
3.如权利要求1所述的配置工业机器人的柔性恒力装置,其特征在于:所述的滑轨滑块组件上部与过渡板连接,过渡板上部与末端工具安装板连接。
4.如权利要求2所述的配置工业机器人的柔性恒力装置,其特征在于:所述的过渡板与上盖板之间设置密封圈。
5.如权利要求1所述的配置工业机器人的柔性恒力装置,其特征在于:所述的倾角传感器型号为:lvt426t、位移传感器型号为mps-032tstp0、压力传感器的型号为:bsls-1、电磁阀型号为:sy5120-5mz-01电气比例调压阀型号为:101b-pre1。
技术总结
本发明是一种配置工业机器人的柔性恒力装置,包括位移传感器、倾角传感器、压力传感器、电气比例调压阀、低阻力气缸、滑轨滑块以及上下盖板与主体框架系统,压力传感器、倾角传感器、位移传感器集成在一起,配合电气比例调压阀控制低阻力气缸,实现任何角度方向上的恒力精准输出,在自动化装配和薄板件打磨行业中,有很强的实用性,位移传感器反馈位置数据,倾角传感器提供设备角度实时监测数据,压力传感器反馈实时压力,电气比例调压阀控制低阻力气缸组件,使得在打磨或是在装配过程中接触力可控。不会因为接触力过大而造成产品变形,在装配过程中,克服因过度挤压而造成不良品等难题,不仅降低了操作人员的难度,还提高了产品的良品率。
技术研发人员:胡国栋,张方
受保护的技术使用者:南京迷思机器人技术有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!