一种工业机器人用可调安装底座及其使用工艺的制作方法
本发明涉及机器人地底座领域,具体是一种工业机器人用可调安装底座及其使用工艺。
背景技术:
1、随着科技的发展,工业机器人已经应用到各个制造领域。而机器人的底座,是机器人安装的基础。
2、参考中国发明专利:201810404585.1:公开了一种工业机器人用可调安装底座工业机器人底座,其技术方案要点是一种工业机器人用可调安装底座工业机器人底座,包括座体及安装脚,所述座体上设有转向盘,所述转向盘中设有安装腔,所述转向盘上设有四个与安装腔连通的安装孔,所述安装腔中设有卡槽,所述安装腔中滑动连接有滑卯,所述滑卯上设有主槽,所述滑卯的一侧伸出座体,所述安装脚的底端设有副槽,所述转向盘上设有对滑卯行程固定的限位装置,所述座体的底侧设有稳固装置;工业机器人的底端从安装孔中滑入到卡槽中,通过滑卯对工业机器人的底侧位置固定,并通过限位装置对滑卯的位置固定,由于滑动滑卯便可实现工业机器人的固定,安装便捷性高;
3、其对比文件中机器人底座在装配中对其进行协调性安装,但出于弧形导轨中,其固定后所要解决的根本性问题没有处理掉,底座的装配中,出现考虑底座与导轨之间的稳固状态是否能供应底座在导轨上平稳运作。
技术实现思路
1、本发明的目的在于:为了解决的问题,提供一种工业机器人用可调安装底座。
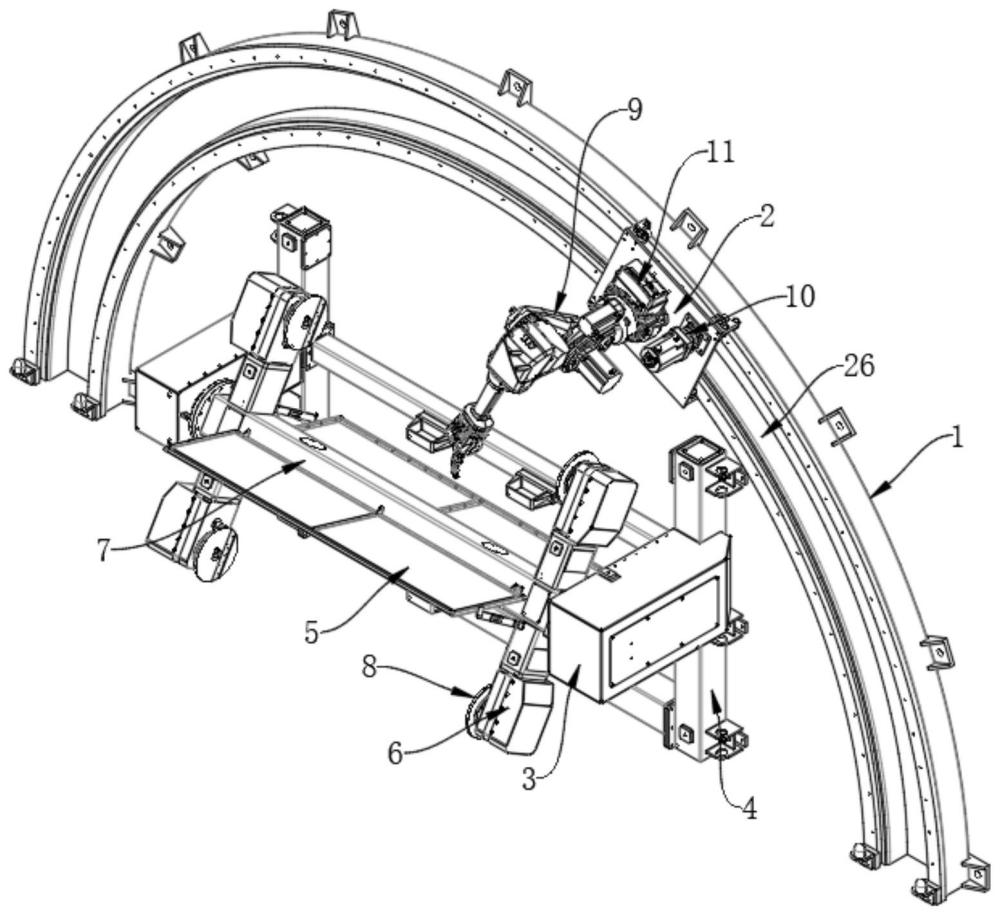
2、为实现上述目的,本发明提供如下技术方案:一种工业机器人用可调安装底座,包括弧轨、设置在弧轨前方的支架、固定设置在支架内框部位的转轴、固定在支架上用于操控转轴转动的电控箱、位于所述转轴外壁左右侧的电机罩、用于和所述转轴固定的操作板以及固定设置在电机罩上用于对所述操作板限位的连接盘,所述弧轨的前立面开设有弧槽,所述弧轨的后立面开设有弧形槽,所述弧槽的槽口前端设置有行进底座,所述行进底座的前立面分别安装有电机和支座护罩,所述电机安装有用于制动所述行进底座在弧槽的槽口位于的齿轮,所述支座护罩安装有用于对转轴表面焊接的机械手,所述行进底座的外壁四周均固定连接有焊块,所述焊块的内外壁下部位安装有滚轮,其滚轮用于和所述弧槽边柜滚动设置。
3、所述支座护罩的内腔中安装有支座,所述支座的左右两侧导油端安装有注油柱,所述支座的顶部安装有扭矩座,所述支座的内腔左右两侧分别安装有锥齿轮一和锥齿轮三,所述锥齿轮一与锥齿轮三的轴心对接部位安装有连接轴,所述锥齿轮一与锥齿轮三的齿端齿合有锥齿轮二,所述锥齿轮二分布与所述支座的内腔上下部位;
4、所述下部位所述支座的底部连接有竖轴,所述竖轴的外壁上居中部位安装有防滑坡机构,所述防滑坡机构的底部安装有弹扩机构;
5、所述防滑坡机构位于所述弧槽的槽口内滑动,所述弹扩机构位于所述弧形槽的槽口内位移。
6、作为本发明再进一步的方案:所述扭矩座包括用于和所述竖轴连接的轴筒,所述轴筒的外壁安装有对接环,所述对接环的外壁安装有轴承座,所述轴承座与所述对接环的外壁安装有外筒。
7、作为本发明再进一步的方案:所述外筒的外壁固定连接有连接环,所述连接环的内腔中安装有内座,所述连接环和所述扭矩座的上表面安装固定,所述外筒的外壁上部位齿合有太阳轮,所述太阳轮安装与连接环的中心开口部位。
8、作为本发明再进一步的方案:所述防滑坡机构的轴心部位内装有内轴筒,所述内轴筒的内壁开设有竖槽,所述内轴筒的外壁上部位固定连接有外凸盘,所述外凸盘的外壁开设有弧槽。
9、作为本发明再进一步的方案:所述防滑坡机构的顶部靠外部位转动连接有接触轮,所述接触轮的外壁转动连接有位移框,所述位移框的下表面靠前部位转动连接有扭力弹簧,所述扭力弹簧的外壁安装有扭力杆,所述扭力杆的外壁固定连接有外轮,所述外轮的外壁固定连接有焊脚。
10、作为本发明再进一步的方案:所述防滑坡机构的侧壁固定连接有加强块,所述加强块的外壁固定连接有弧护块,所述弧护块的外壁设置有焊片,所述焊片与焊脚固定连接。
11、作为本发明再进一步的方案:所述内轴筒的内腔开设有竖槽,所述内轴筒的底部固定连接有接轴,所述接轴的底部固定连接有基板。
12、作为本发明再进一步的方案:所述弹扩机构包括安装在竖轴一端的齿轮四,所述齿轮四的外壁齿合有行星轮,所述行星轮的外壁设置有外轮,所述外轮的内壁开设有内槽,所述内槽与行星轮相齿合,所述外轮的外围设置有齿轮箱。
13、作为本发明再进一步的方案:所述齿轮四的轴心底部固定连接有齿轮三,所述齿轮三的外壁分别齿合有齿轮一和齿轮二,所述齿轮二与齿轮一的外壁分别齿合有轮杆,所述轮杆的数量为两组,且两组所述轮杆之间通过弹簧连接。
14、本发明还公开了一种工业机器人用可调安装底座的使用工艺,采用上述一种工业机器人用可调安装底座,包括以下步骤:
15、s1、控制行进底座的上的电机进行运作,其电机驱动轴外壁安装的齿轮和弧槽的槽口上部位安装的齿槽齿合,从而可以使得行进底座在弧轨的前立面进行弧形位移,连接在行进底座上的支座护罩以及机械手也进行位移,在支座护罩的内罩中安装的支座用于对扭矩座的支撑;
16、s2、控制锥齿轮三一端的外置电机运作,带动锥齿轮三转动,位于锥齿轮三轴心部位所连接的连接轴和锥齿轮一接触,同时在锥齿轮一和锥齿轮三之间安装的锥齿轮二在锥齿轮三的驱动下进行转动,上部位的锥齿轮二用于带动扭矩座内的轴筒转动,安装在轴筒外壁上的对接环、轴承座和连接轴以及连接环都将在内座内腔中旋转,而处于外筒外壁上部位并与外筒外壁齿合的太阳轮在外筒的动力下进行转动,用于增大轴筒的扭矩;
17、s3、通过将竖轴外壁的滑块与防滑坡机构内的内轴筒所开设的竖槽对接,从而用于和内轴筒的固定,在竖轴转动下,其内轴筒也将转动,并制动连接在内轴筒外壁上的外凸盘转动,开设在外凸盘外壁部位的弧槽和接触轮接触后,将会推动接触轮以及通过位移框连接的扭力弹簧向外偏移,其连接在扭力弹簧外壁上的扭力杆、外轮和连接块以及焊脚带动焊片脱离弧护块的外壁,并用于对弧槽的槽口进行接触;
18、s4、连接在竖轴前端的齿轮四转动用于带动行星轮在外轮的内腔中进行转动,而设置的行星轮和齿轮四以及外轮之间的配合,用于增加竖轴的扭矩,增大输出比,使其运作后的动力更足,连接在齿轮四轴心底部的齿轮三带动齿轮一和齿轮二转动,与齿轮一和齿轮二外壁齿合的连接的轮杆将会向着弧轨背面开设的弧形槽内腔中位移,并通过安装在轮杆底部的滚轮在弧形槽的槽口内滑动,在其轮杆向着弧形槽内腔位移后,其滚轮将会挤压在弧形槽的槽口内,用于助力支座及其连接组件在弧槽的槽口位移。
19、与现有技术相比,本发明的有益效果是:
20、1、通过设置防滑坡机构,通过其竖轴外壁的滑块与防滑坡机构内的内轴筒所开设的竖槽对接,从而用于和内轴筒的固定,在竖轴转动下,其内轴筒也将转动,并制动连接在内轴筒外壁上的外凸盘转动,开设在外凸盘外壁部位的弧槽和接触轮接触后,将会推动接触轮以及通过位移框连接的扭力弹簧向外偏移,其连接在扭力弹簧外壁上的扭力杆、外轮和连接块以及焊脚带动焊片脱离弧护块的外壁,并用于对弧槽的槽口进行接触,而用于放置在底座经过弧形坡度的时候,进行协调式限位,避免其在弧形坡面出现滑坡的情况发生。
21、2、通过设置弹扩机构;连接在竖轴前端的齿轮四转动用于带动行星轮在外轮的内腔中进行转动,而设置的行星轮和齿轮四以及外轮之间的配合,用于增加竖轴的扭矩,增大输出比,使其运作后的动力更足,连接在齿轮四轴心底部的齿轮三带动齿轮一和齿轮二转动,与齿轮一和齿轮二外壁齿合的连接的轮杆将会向着弧轨背面开设的弧形槽内腔中位移,并通过安装在轮杆底部的滚轮在弧形槽的槽口内滑动,在其轮杆向着弧形槽内腔位移后,其滚轮将会挤压在弧形槽的槽口内,用于助力支座及其连接组件在弧槽的槽口位移。
22、3、通过设置扭矩座;控制锥齿轮三一端的外置电机运作,带动锥齿轮三转动,位于锥齿轮三轴心部位所连接的连接轴和锥齿轮一接触,同时在锥齿轮一和锥齿轮三之间安装的锥齿轮二在锥齿轮三的驱动下进行转动,上部位的锥齿轮二用于带动扭矩座内的轴筒转动,安装在轴筒外壁上的对接环、轴承座和连接轴以及连接环都将在内座内腔中旋转,而处于外筒外壁上部位并与外筒外壁齿合的太阳轮在外筒的动力下进行转动,用于增大轴筒的扭矩,从而可以保证机械臂的运作调节更加流畅。
- 还没有人留言评论。精彩留言会获得点赞!