一种具有双回旋自由度的微型动力刀具装置及其控制方法
本发明涉及数控机床设备控制,具体涉及一种具有双回旋自由度的微型动力刀具装置及其控制方法。
背景技术:
1、五坐标数控加工机床是一种加工复杂曲面工件的重要设备,机构复杂,价格昂贵,特别是微型的复杂曲面工件的专用加工设备,更是具有很高的技术要求。
2、在当下,数控机床设备的模块化已经成为技术发展的趋势,其中一种思路是把五坐标的数控加工设备分解成两个大的结构模块,其一是三直线坐标运动滑台,其二是双回转运动的动力刀具,双回转运动的动力刀具俗称双摆头,目前的双摆头的每一个摆动坐标轴都只用一个电机驱动,只有在较大的尺寸下,这种结构才能保证必要的刚度,这就限制了五坐标数控加工设备的小型化。
3、因此,亟需一种具有双回旋自由度的微型动力刀具装置,来解决传统的模块化的数控机床设备,因刚度需求,限制了模块的尺寸,从而限制了五坐标数控加工设备小型化的问题。
技术实现思路
1、本发明针对现有技术中的不足,提供一种具有双回旋自由度的微型动力刀具装置,以解决传统的模块化的数控机床设备,因刚度需求,限制了模块的尺寸,从而限制了五坐标数控加工设备小型化的问题。
2、为实现上述目的,本发明采用以下技术方案:
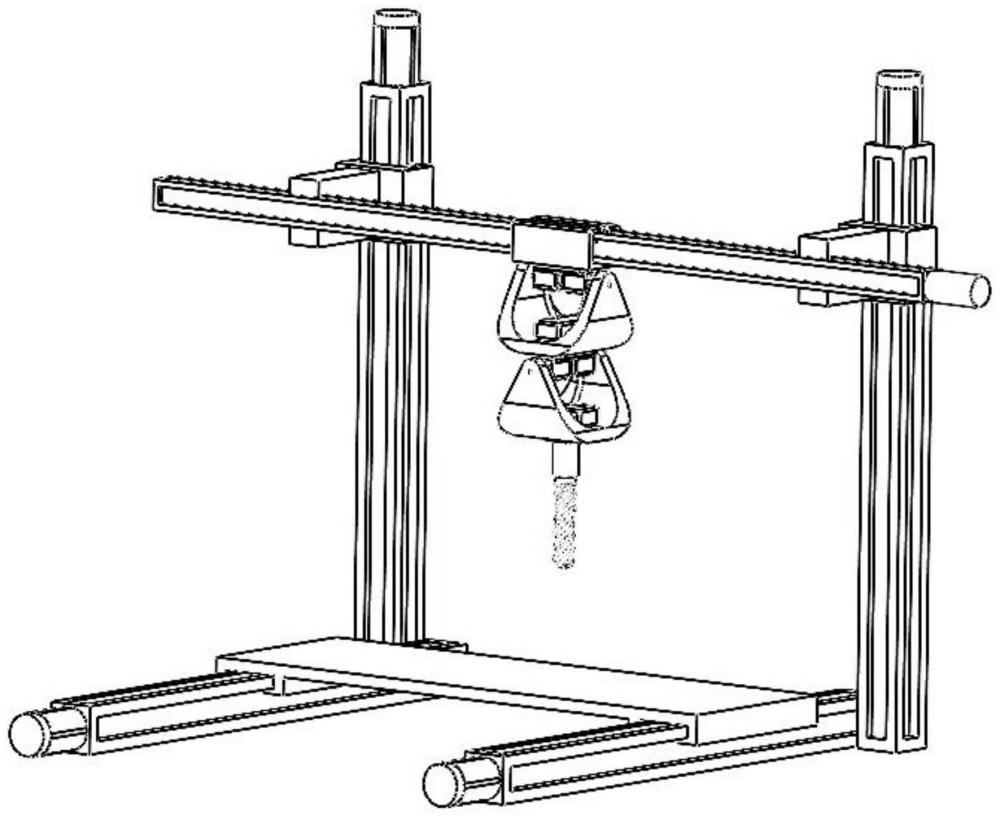
3、一种具有双回旋自由度的微型动力刀具装置,包括顶部滑块,所述顶部滑块用于与三坐标滑台的横樑滑动连接,其特征在于:还包括第一u型板件、第一组回旋减速电机、第二u型板件、第二组回旋减速电机和旋转刀具模块,所述第一组回旋减速电机的基座均连接在所述顶部滑块的底端,第一组回旋减速电机的回旋减速电机用于分别连接第一u型板件的双耳并驱动第一u型板件以双耳为轴进行转动;所述第二组回旋减速电机的基座均连接在第一u型板件的底板且远离第一组回旋减速电机的一侧,第二组回旋减速电机的回旋减速电机用于分别连接第二u型板件的双耳并驱动第二u型板件以双耳为轴进行转动;所述第二u型板件的底板且远离第二组回旋减速电机的一侧连接有旋转刀具模块。
4、为优化上述技术方案,采取的具体措施还包括:
5、进一步地,所述第一组回旋减速电机驱动第一u型板件转动的轴与所述第二组回旋减速电机驱动第二u型板件转动的轴相垂直。
6、进一步地,还包括第一回旋减速电机同步控制器,所述第一组回旋减速电机包括第一回旋减速电机和第二回旋减速电机,所述第一回旋减速电机的基座和第二回旋减速电机的基座均与所述顶部滑块刚性相连,第一回旋减速电机的轴和第二回旋减速电机的轴分别与所述第一u型板件的双耳刚性相连,所述第一回旋减速电机同步控制器安装在第一u型板件的底板上,用于控制第一回旋减速电机和第二回旋减速电机同步转动。
7、进一步地,还包括第二回旋减速电机同步控制器,所述第二组回旋减速电机包括第三回旋减速电机和第四回旋减速电机,所述第三回旋减速电机的基座和第四回旋减速电机的基座均与所述第一u型板件的底板且远离所述第一组回旋减速电机的一侧刚性相连,第三回旋减速电机的轴和第四回旋减速电机的轴分别与所述第二u型板件的双耳刚性相连,所述第二回旋减速电机同步控制器安装第二u型板件的底板上,用于控制第三回旋减速电机和第四回旋减速电机同步转动。
8、进一步地,所述旋转刀具模块包括旋转刀具驱动电机和刀具,所述第二u型板件的底板且远离第二组回旋减速电机的一侧与所述旋转刀具驱动电机的非输出轴端面刚性连接,所述刀具与旋转刀具驱动电机的输出轴相连,旋转刀具驱动电机用于驱动刀具。
9、进一步地,还包括旋转刀具驱动电机控制器,所述旋转刀具驱动电机控制器与旋转刀具驱动电机电连接,用于控制旋转刀具驱动电机。
10、进一步地,所述回旋减速电机的输出轴端均安装角位移传感器。
11、一种具有双回旋自由度的微型动力刀具装置的控制方法,其特征在于:
12、包括顶部滑块、第一u型板件、第一组回旋减速电机、第二u型板件、第二组回旋减速电机和旋转刀具模块,所述第一组回旋减速电机的基座均连接在所述顶部滑块的底端,第一组回旋减速电机的回旋减速电机用于分别连接第一u型板件的双耳并驱动第一u型板件以双耳为轴进行转动;所述第二组回旋减速电机的基座均连接在第一u型板件的底板且远离第一组回旋减速电机的一侧,第二组回旋减速电机的回旋减速电机用于分别连接第二u型板件的双耳并驱动第二u型板件以双耳为轴进行转动;所述第二u型板件的底板且远离第二组回旋减速电机的一侧连接有旋转刀具模块;
13、还包括第一回旋减速电机同步控制器,所述第一组回旋减速电机包括第一回旋减速电机和第二回旋减速电机,所述第一回旋减速电机同步控制器用于控制第一回旋减速电机和第二回旋减速电机同步转动;
14、所述第一回旋减速电机和第二回旋减速电机的输出轴端均安装角位移传感器,所述第一回旋减速电机同步控制器同时接收第一回旋减速电机和第二回旋减速电机上的角位移传感器的信号,在第一回旋减速电机同步控制器内部,包含两个控制单元,分别对第一回旋减速电机和第二回旋减速电机的速度及电流进行控制,还有一个同步补偿单元,同步补偿单元根据所述第一回旋减速电机和第二回旋减速电机的角位移传感器的信号,分别计算第一回旋减速电机的角速度信号反馈值ω1_fback和第二回旋减速电机的角速度信号反馈值ω2_fback,同步补偿单元再根据第一回旋减速电机的角速度信号反馈值ω1_fback和第二回旋减速电机的角速度信号反馈值ω2_fback,进行第一回旋减速电机和第二回旋减速电机的速度同步。
15、其中,在第一回旋减速电机同步控制器内部包含的两个控制单元均有各自的速度控制器和电流控制器,两个控制单元共用同一个外部的位置控制器,接收功能共用的位置控制发出的信号,作为速度命令。
16、进一步地,所述同步补偿单元计算第一回旋减速电机的角速度信号反馈值ω1_fback和第二回旋减速电机的角速度信号反馈值ω2_fback的步骤如下:
17、步骤1:计算第一回旋减速电机的角位移信号θ1,计算其变换率,得到角速度信号ω1;
18、步骤2:计算第二回旋减速电机的角位移信号θ2,通过差分运算,计算其变换率,得到角速度信号ω2;
19、步骤3:分别计算第一回旋减速电机的角速度信号反馈值ω1_fback=kω1+(1-k)ω2和第二回旋减速电机的角速度信号反馈值ω2_fback=kω2+(1-k)ω1,ω1_fback用做第一回旋减速电机的速度控制器的反馈信号,第一回旋减速电机的速度控制器根据位置控制器发出的给定信号和反馈信号ω1_fback来调节第一回旋减速电机的速度,ω2_fback用做第二回旋减速电机的速度控制器的反馈信号,第二回旋减速电机的速度控制器根据位置控制器发出的给定信号和反馈信号ω2_fback来调节第二回旋减速电机的速度;
20、在所述步骤3计算ω1_fback和ω2_fback采用的公式中,k是介于0和1之间的正小数,通常情况下k=0.5。
21、进一步地,还包括第二回旋减速电机同步控制器,所述第二组回旋减速电机包括第三回旋减速电机和第四回旋减速电机,所述第二回旋减速电机同步控制器用于控制第三回旋减速电机和第四回旋减速电机同步转动;
22、所述第三回旋减速电机和第四回旋减速电机的输出轴端均安装角位移传感器,所述第二回旋减速电机同步控制器同时接收第三回旋减速电机和第四回旋减速电机上的角位移传感器的信号,在第二回旋减速电机同步控制器内部,包含两个控制单元,分别对第三回旋减速电机和第四回旋减速电机的速度及电流进行控制,还有一个同步补偿单元,同步补偿单元根据所述第三回旋减速电机和第四回旋减速电机的角位移传感器的信号,分别计算第三回旋减速电机的角速度信号反馈值和第四回旋减速电机的角速度信号反馈值,同步补偿单元再根据第三回旋减速电机的角速度信号反馈值和第四回旋减速电机的角速度信号反馈值,进行第三回旋减速电机和第四回旋减速电机的速度同步。
23、本发明的有益效果是:
24、本发明通过第一组回旋减速电机的第一回旋减速电机和第二回旋减速电机分别同步驱动第一u型板件以双耳为轴进行转动;通过第二组回旋减速电机的第三回旋减速电机和第四回旋减速电机分别同步驱动第二u型板件以双耳为轴进行转动,满足双回转运动。且通过均采用双旋减速电机的同步驱动,有效提高了微型回转运动刀具的刚度,使得五坐标数控加工设备能够实现小型化,同时也提高了切削精度。
- 还没有人留言评论。精彩留言会获得点赞!