一种搅拌摩擦焊接设备及其主轴焊缝辅助对中装置和方法与流程
本发明涉及焊接,特别涉及一种主轴焊缝辅助对中装置。本发明还涉及一种主轴焊缝辅助对中方法和一种搅拌摩擦焊接设备。
背景技术:
1、搅拌摩擦焊是一种新兴的焊接技术,具有无需消耗焊材、环保、焊缝性能好等优点,广泛应用于航空航天、汽车船舶、电子电力行业中。搅拌摩擦焊技术主要利用高速旋转的焊具与工件摩擦产生的热量使被焊材料局部熔化,当焊具沿着两个工件之间的预置焊缝进行直线进给运动时,被塑性化的材料在焊具的转动摩擦力作用下由焊具的前部流向后部,并在焊具的挤压下形成致密的固相焊缝。
2、在现有技术中,焊具与预置焊缝之间的对中操作,需要焊接操作员目视观察,然后控制主轴移动,再微调主轴的位置,最终实现对中。然而,通过目视观察进行对中的方法,往往需要焊接操作员多次进行主轴位置调整操作,不仅过程繁琐、作业效率低,而且对中精度较低,目视确定的对中结果往往误差较大,导致在焊接过程中,焊具无法均匀地对两个工件施加载荷,进而导致两个工件焊接时受热不平衡,削弱焊接质量。
3、因此,如何方便、高效地实现焊具与预置焊缝之间的对中操作,同时提高对中精度,保证焊接质量,是本领域技术人员面临的技术问题。
技术实现思路
1、本发明的目的是提供一种主轴焊缝辅助对中装置,能够方便、高效地实现焊具与预置焊缝之间的对中操作,同时提高对中精度,保证焊接质量。本发明的另一目的是提供一种主轴焊缝辅助对中方法和一种搅拌摩擦焊接设备。
2、为解决上述技术问题,本发明提供一种主轴焊缝辅助对中装置,包括可移动地设置于搅拌摩擦焊接设备的焊接工作台上的成像组件,以及控制器;
3、所述成像组件的移动方向垂直于所述焊接工作台上装夹的第一工件与第二工件之间的预置焊缝的延伸方向;
4、所述成像组件用于对所述预置焊缝及搅拌摩擦焊接设备的焊具成像,并通过图像识别技术分别识别所述预置焊缝及所述焊具的中轴线在所述成像组件的移动方向上的初始位置;
5、所述控制器与所述成像组件及搅拌摩擦焊接设备信号连接,用于根据所述成像组件的图像识别结果计算所述预置焊缝与所述焊具的中轴线的间距,并据此控制搅拌摩擦焊接设备的主轴沿所述成像组件的移动方向朝所述预置焊缝移动。
6、优选地,还包括设置于所述焊接工作台上的导轨,以及可滑动地设置于所述导轨上的滑块,所述导轨的延伸方向垂直于所述预置焊缝的延伸方向,所述成像组件安装于所述滑块上。
7、优选地,所述成像组件包括壳体、设置于所述壳体上的镜筒、设置于所述壳体内的成像芯片,所述镜筒设置于所述壳体的朝向所述焊具的侧壁上,所述成像芯片用于对所述镜筒接收的光信号进行成像并对成像结果进行图像识别。
8、优选地,所述成像组件还包括设置于所述壳体上的操作件,所述操作件用于供用户操作,以触发所述成像芯片的成像功能。
9、优选地,所述操作件设置有两个,以使所述成像芯片在成像后分别记录所述预置焊缝的初始位置及所述焊具的中轴线的初始位置。
10、优选地,所述成像组件还包括设置于所述壳体上的显示屏,所述显示屏用于显示所述成像芯片的成像结果和/或图像识别结果。
11、优选地,还包括设置于所述成像组件上的激光器,所述激光器用于发射呈竖直姿态的线性激光,以辅助用户将所述成像组件与所述预置焊缝目视对齐、将所述成像组件与所述焊具的中轴线的初始位置目视对齐、校核所述焊具的中轴线在移动结束后是否与所述预置焊缝对齐。
12、本发明还提供一种主轴焊缝辅助对中方法,应用于上述任一项所述的主轴焊缝辅助对中装置,包括:
13、将成像组件沿预设方向移动至预设位置处,并对第一工件与第二工件之间的预置焊缝和焊具成像;其中,所述预设方向为与所述预置焊缝的延伸方向垂直的方向;
14、通过图像识别技术分别识别所述预置焊缝及所述焊具的中轴线在所述预设方向上的初始位置,并据此计算两者的间距;
15、根据所述间距控制主轴沿所述预设方向朝所述预置焊缝移动。
16、优选地,在所述主轴的移动结束后,还包括:
17、通过激光器正对所述预设焊缝发射呈竖直姿态的线性激光,并据此判断所述焊具的中轴线是否与所述预置焊缝对齐。
18、本发明还提供一种搅拌摩擦焊接设备,包括焊接工作台、主轴、与所述主轴相连的焊具,所述焊接工作台用于定位装夹待焊接的第一工件和第二工件,还包括如上述任一项所述的主轴焊缝辅助对中装置。
19、本发明所提供的主轴焊缝辅助对中装置,主要包括成像组件和控制器。其中,成像组件设置在搅拌摩擦焊接设备的焊接工作台上,并与焊接工作台形成移动连接,具有直线运动自由度,能够在焊接工作台的台面上进行直线运动,且运动方向垂直于焊接工作台上装夹的第一工件与第二工件之间的预置焊缝的延伸方向。成像组件具有成像功能和图像识别功能,主要用于在焊前准备过程中,通过移动调整到合适的位置,并分别对预置焊缝和搅拌摩擦焊接设备的焊具进行成像,再通过图像识别技术对成像结果进行分析,以分别识别出预置焊缝及焊具的中轴线在成像组件的移动方向上的初始位置。控制器与成像组件及搅拌摩擦焊接设备形成信号连接,主要用于根据成像组件的图像识别结果计算预置焊缝与焊具的中轴线的间距——由于成像组件的图像识别结果是预置焊缝及焊具的中轴线在成像组件的移动方向上的初始位置,因此,控制器计算出的间距具体也是预置焊缝与焊具的中轴线在成像组件的移动方向上的间距;在计算出上述间距值后,控制器再根据该间距值控制搅拌摩擦焊接设备的主轴沿着成像组件的移动方向朝向预置焊缝移动,具体的移动距离即为计算出的间距值,使得主轴运动到预置焊缝的正上方,从而确保焊具的中轴线在理论上与预置焊缝保持精确对齐,完成焊前对中作业。
20、如此,本发明所提供的主轴焊缝辅助对中装置,在焊前准备过程中,只需通过成像组件利用图像识别技术确定预置焊缝及焊具的中轴线在自身移动方向上的初始位置,即可通过控制器根据两者初始位置的间距调整主轴的位置,将焊具的中轴线移动至与预置焊缝对齐,完成焊前对中作业,因此能够方便、高效地实现焊具与预置焊缝之间的对中操作,同时提高对中精度,保证焊接质量。
21、本发明所提供的主轴焊缝辅助对中方法,应用于上述主轴焊缝辅助对中装置,显然也具有与之相同的有益效果。
22、本发明所提供的搅拌摩擦焊接设备,由于包括了上述主轴焊缝辅助对中装置,因此显然也具有与之相同的有益效果。
技术特征:
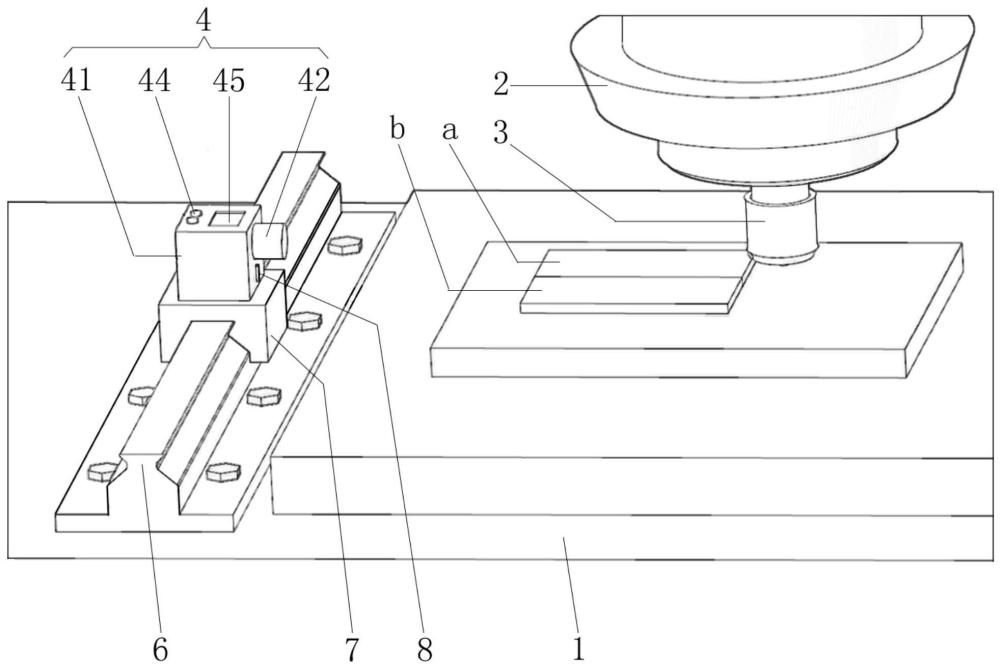
1.一种主轴焊缝辅助对中装置,其特征在于,包括可移动地设置于搅拌摩擦焊接设备的焊接工作台(1)上的成像组件(4),以及控制器(5);
2.根据权利要求1所述的主轴焊缝辅助对中装置,其特征在于,还包括设置于所述焊接工作台(1)上的导轨(6),以及可滑动地设置于所述导轨(6)上的滑块(7),所述导轨(6)的延伸方向垂直于所述预置焊缝的延伸方向,所述成像组件(4)安装于所述滑块(7)上。
3.根据权利要求1所述的主轴焊缝辅助对中装置,其特征在于,所述成像组件(4)包括壳体(41)、设置于所述壳体(41)上的镜筒(42)、设置于所述壳体(41)内的成像芯片(43),所述镜筒(42)设置于所述壳体(41)的朝向所述焊具(3)的侧壁上,所述成像芯片(43)用于对所述镜筒(42)接收的光信号进行成像并对成像结果进行图像识别。
4.根据权利要求3所述的主轴焊缝辅助对中装置,其特征在于,所述成像组件(4)还包括设置于所述壳体(41)上的操作件(44),所述操作件(44)用于供用户操作,以触发所述成像芯片(43)的成像功能。
5.根据权利要求4所述的主轴焊缝辅助对中装置,其特征在于,所述操作件(44)设置有两个,以使所述成像芯片(43)在成像后分别记录所述预置焊缝的初始位置及所述焊具(3)的中轴线的初始位置。
6.根据权利要求3所述的主轴焊缝辅助对中装置,其特征在于,所述成像组件(4)还包括设置于所述壳体(41)上的显示屏(45),所述显示屏(45)用于显示所述成像芯片(43)的成像结果和/或图像识别结果。
7.根据权利要求1-6任一项所述的主轴焊缝辅助对中装置,其特征在于,还包括设置于所述成像组件(4)上的激光器(8),所述激光器(8)用于发射呈竖直姿态的线性激光,以辅助用户将所述成像组件(4)与所述预置焊缝目视对齐、将所述成像组件(4)与所述焊具(3)的中轴线的初始位置目视对齐、校核所述焊具(3)的中轴线在移动结束后是否与所述预置焊缝对齐。
8.一种主轴焊缝辅助对中方法,应用于权利要求1-7任一项所述的主轴焊缝辅助对中装置,其特征在于,包括:
9.根据权利要求8所述的主轴焊缝辅助对中方法,其特征在于,在所述主轴(2)的移动结束后,还包括:
10.一种搅拌摩擦焊接设备,包括焊接工作台(1)、主轴(2)、与所述主轴(2)相连的焊具(3),所述焊接工作台(1)用于定位装夹待焊接的第一工件(a)和第二工件(b),其特征在于,还包括如权利要求1-7任一项所述的主轴焊缝辅助对中装置。
技术总结
本发明公开一种主轴焊缝辅助对中装置,包括可移动地设置于焊接工作台上的成像组件和控制器;成像组件的移动方向垂直于预置焊缝的延伸方向;成像组件用于对预置焊缝及搅拌摩擦焊接设备的焊具成像,并通过图像识别技术分别识别预置焊缝及焊具的中轴线在成像组件的移动方向上的初始位置;控制器与成像组件及搅拌摩擦焊接设备信号连接,用于根据成像组件的图像识别结果计算预置焊缝与焊具的中轴线的间距,并据此控制主轴沿成像组件的移动方向朝预置焊缝移动。本发明能够方便、高效地实现焊具与预置焊缝之间的对中操作,同时提高对中精度,保证焊接质量。本发明还公开一种主轴焊缝辅助对中方法和一种搅拌摩擦焊接设备,其有益效果如上所述。
技术研发人员:刘沁钰
受保护的技术使用者:西安歌尔泰克电子科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!