一种螺栓拆卸装置的制作方法
本技术涉及机械自动化,具体而言,涉及一种螺栓拆卸装置。
背景技术:
1、目前,叶片合模时需要预装螺栓,以防止胶进螺纹孔,和避免合模后上下半圆的螺栓孔走偏不能对准。人工进行拆装螺栓的工作,比较浪费人力和劳动强度较大,再者叶片的叶根比较大,人要拆螺栓需要爬到较高的位置才可以,也会造成一定的安全隐患。
技术实现思路
1、为解决上述问题,本实用新型实施例的目的在于提供一种螺栓拆卸装置。
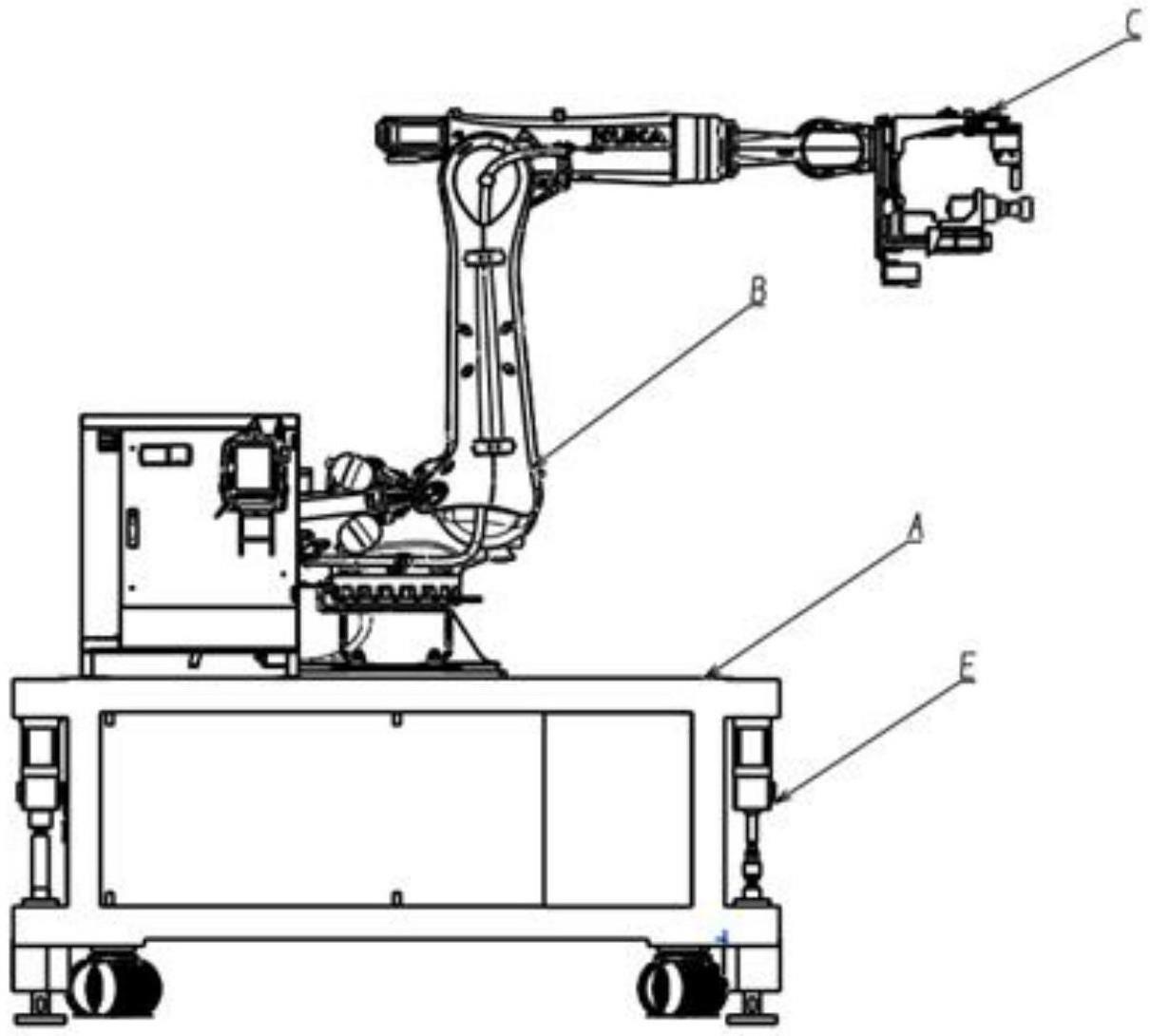
2、第一方面,本实用新型实施例提供了一种螺栓拆卸装置,包括:机械臂、夹具模块以及装置底座;
3、所述机械臂固定在所述装置底座上;所述夹具模块固定在所述机械臂上;
4、所述机械臂能够带动所述夹具模块对安装到叶片上的螺栓进行拆卸。
5、本实用新型实施例上述第一方面提供的方案中,在螺栓拆卸装置中设置机械臂、夹具模块以及装置底座;所述机械臂固定在所述装置底座上;所述夹具模块固定在所述机械臂上;所述机械臂能够带动所述夹具模块对安装到叶片上的螺栓进行拆卸,与相关技术中人工进行拆装螺栓的工作的方式相比,螺栓拆卸装置可以通过安装的夹具模块自动对叶片合模后预装的螺栓进行拆装,无需人工操作,大大提高了安全性。并增加了预装螺栓的拆卸效率。
6、为使本实用新型的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种螺栓拆卸装置,其特征在于,包括:机械臂、夹具模块以及装置底座;
2.根据权利要求1所述的螺栓拆卸装置,其特征在于,所述夹爪垂向运动机构,包括:第二滑轨、第二气缸和第二滑块;
3.根据权利要求2所述的螺栓拆卸装置,其特征在于,所述螺栓拆卸机构,包括:两个导向柱、两个直线轴承、机构固定座、导向柱连接板、套筒、气动扳手、气动扳手法兰板、弹性元件、双轴气缸以及气缸安装板;
4.根据权利要求3所述的螺栓拆卸装置,其特征在于,所述夹具模块,还包括:连接块、液压限位器、液压缓冲器、第一l型法兰板和第二l型法兰板;
5.根据权利要求4所述的螺栓拆卸装置,其特征在于,所述夹具模块,还包括:挡片、图像采集单元、传感器支架、光电传感器、金属传感器和第三l型法兰板;
6.根据权利要求1所述的螺栓拆卸装置,其特征在于,所述装置底座,包括:底座本体、万向轮和支撑机构;
7.根据权利要求6所述的螺栓拆卸装置,其特征在于,所述支撑机构,包括:气缸固定座、锁紧气缸、浮动接头、导向轴、中空固定座以及支撑板;
8.根据权利要求7所述的螺栓拆卸装置,其特征在于,所述支撑机构,还包括:衬套;
技术总结
本技术提供了一种螺栓拆卸装置,包括:机械臂、夹具模块以及装置底座;所述机械臂固定在所述装置底座上;所述夹具模块固定在所述机械臂上;所述机械臂能够带动所述夹具模块对安装到叶片上的螺栓进行拆卸。本技术提供的螺栓拆卸装置,可以通过安装的夹具模块自动对叶片合模后预装的螺栓进行拆装,无需人工操作,大大提高了安全性。并增加了预装螺栓的拆卸效率。
技术研发人员:朱兴达
受保护的技术使用者:上海辛帕智能科技股份有限公司
技术研发日:20230106
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!