一种地轨式桁架机器人使用的机械手的制作方法
本技术涉及机械手,尤其是一种地轨式桁架机器人使用的机械手。
背景技术:
1、地轨式桁架机器人是一个三轴导轨系统,焊接机械手固定在动力滑台上并因此可以线性移动;末端执行的动力滑台通过配置的三轴x、y、z空间直线移动机构进行移动,控制通过集成了外部动力轴的机器人控制柜控制系统进行。
2、地轨式桁架机器人在线性搬运后,需要将一些金属件或金属板的连接部分进行固定连接,即焊接,这种焊接又大都采用手工焊接,手工焊接的质量取决于焊工的技术水平和操作时的发挥状态,焊接质量不稳定,工人劳动强度大,容易疲劳,直接影响产品的制造质量,而且焊接时产生的烟雾对操作人员的呼吸系统产生损害;因此,需要配套机械手安装在动力滑台以完成焊接工作。现有的智能工业焊接臂能够直接配套地轨或者变位机进行焊接工作,然而应用于地轨桁架上时,由于大体积、大重量比的机械臂载荷要求非常高,三轴桁架的线性移动会受到影响,因此则需要提出一种结构轻量化的焊接机械手。
技术实现思路
1、本申请针对上述现有技术中的缺点,提供一种地轨式桁架机器人使用的机械手,其具有多个焊接自由度,且具有结构轻量化的特点,能够良好地配套地轨式桁架机器人使用。
2、本实用新型解决上述技术问题所采用的技术方案如下:
3、一种地轨式桁架机器人使用的机械手,其包括桁架固定台,所述桁架固定台的下方安装底座,底座的末端连接第一关节臂,所述第一关节臂的驱动端转动设置大臂,所述大臂的末端与第二关节臂可转动连接,所述第二关节臂的末端设置焊枪组件。
4、进一步地,所述桁架固定台被配置为倒置安装型。
5、进一步地,所述底座包括其本体的机壳以及内置于其内部的第一伺服电机,所述第一伺服电机的驱动端与第一关节臂转动连接。
6、进一步地,所述大臂本体的首尾端均具有与电机驱动端转动连接的轴承,所述大臂的外表面设置有用于固定走线的固定座。
7、进一步地,所述第二关节臂包括一个l型的肘架,肘架一端固设有第二驱动件,所述第二驱动件与所述大臂转动连接,肘架的另一端固设有第三驱动件,所述第三驱动件与所述焊枪组件转动连接。
8、进一步地,所述第二驱动件以及第三驱动件为伺服电机。
9、进一步地,所述焊枪组件为氩弧焊自动焊枪。
10、本实用新型的有益效果如下:
11、相比现有技术,本实用新型采用倒置安装结构,底座倒置固设于桁架固定台下方,底座直接连接第一关节臂、大臂、第二关节臂、焊枪组件,线缆外置固定机壳表面,各部件钢构均使用钛合金,整体结构紧凑,减少了其他钢构结构件,降低了本身的负载,相比现有技术的机械手更轻量化,因此在投入桁架线性作业机器人中能够避免因为大体积、高载荷引起的线性偏移、刚性冲击、行走不稳定等因素。
技术特征:
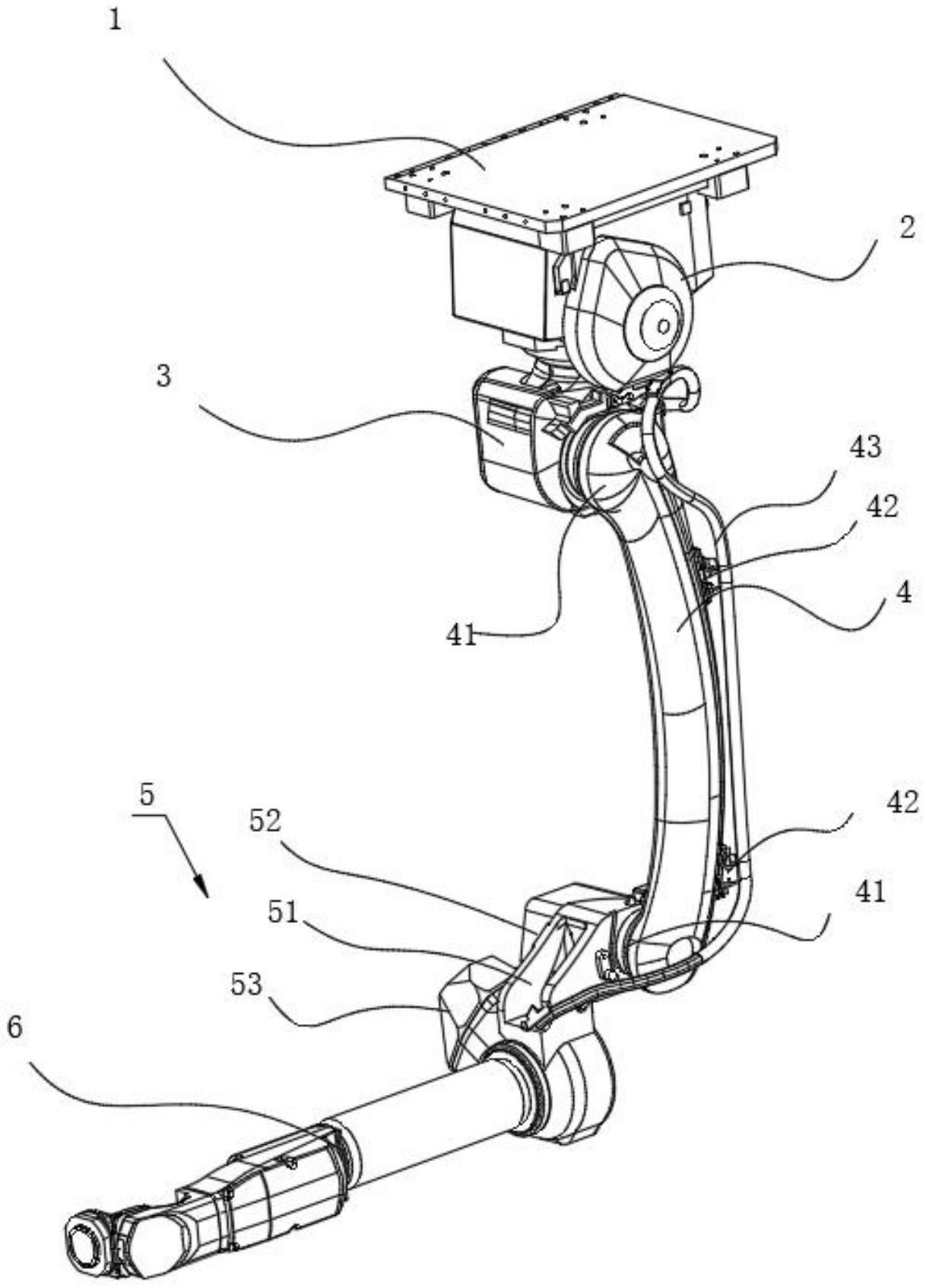
1.一种地轨式桁架机器人使用的机械手,其特征在于:包括桁架固定台(1),所述桁架固定台(1)的下方安装底座(2),底座(2)的末端连接第一关节臂(3),所述第一关节臂(3)的驱动端转动设置大臂(4),所述大臂(4)的末端与第二关节臂(5)可转动连接,所述第二关节臂(5)的末端设置焊枪组件(6)。
2.如权利要求1所述的一种地轨式桁架机器人使用的机械手,其特征在于:所述桁架固定台(1)被配置为倒置安装型。
3.如权利要求1所述的一种地轨式桁架机器人使用的机械手,其特征在于:所述底座(2)包括其本体的机壳以及内置于其内部的第一伺服电机,所述第一伺服电机的驱动端与第一关节臂(3)转动连接。
4.如权利要求1所述的一种地轨式桁架机器人使用的机械手,其特征在于:所述大臂(4)本体的首尾端均具有与电机驱动端转动连接的轴承(41),所述大臂(4)的外表面设置有用于固定走线的固定座(42)。
5.如权利要求1所述的一种地轨式桁架机器人使用的机械手,其特征在于:所述第二关节臂(5)包括一个l型的肘架(51),肘架(51)一端固设有第二驱动件(52),所述第二驱动件(52)与所述大臂(4)转动连接,肘架(51)的另一端固设有第三驱动件(53),所述第三驱动件(53)与所述焊枪组件(6)转动连接。
6.如权利要求5所述的一种地轨式桁架机器人使用的机械手,其特征在于:所述第二驱动件(52)以及第三驱动件(53)为伺服电机。
7.如权利要求1所述的一种地轨式桁架机器人使用的机械手,其特征在于:所述焊枪组件(6)为氩弧焊自动焊枪。
技术总结
本技术提供了一种地轨式桁架机器人使用的机械手,其包括桁架固定台,桁架固定台的下方安装底座,底座的末端连接第一关节臂,第一关节臂的驱动端转动设置大臂,大臂的末端与第二关节臂可转动连接,第二关节臂的末端设置焊枪组件;本技术采用倒置安装结构,底座倒置固设于桁架固定台下方,底座直接连接第一关节臂、大臂、第二关节臂、焊枪组件,线缆外置固定机壳表面,各部件钢构均使用钛合金,整体结构紧凑,减少了其他钢构结构件,降低了本身的负载,相比现有技术的机械手更轻量化,因此在投入桁架线性作业机器人中能够避免因为大体积、高载荷引起的线性偏移、刚性冲击、行走不稳定等因素。
技术研发人员:赵宇,迟志朋
受保护的技术使用者:无锡鑫金雨智能制造有限公司
技术研发日:20230109
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!