一种定位结构及可移动式无轨焊缝自动跟踪机器人
本技术涉及焊接装置,具体为一种定位结构及可移动式无轨焊缝自动跟踪机器人。
背景技术:
1、可移动式无轨焊缝自动跟踪机器人是指从事焊接的工业机器人,是一种多用途的、可重复编程的自动控制操作机。
2、现有技术中,可移动式无轨焊缝自动跟踪机器人通过基座进行支撑使其工作,安装时将基座和机器人底部对接并使二者表面开设的固定孔进行对齐,然后通过多组螺栓对二者进行固定完成基座和机器人的对接安装。
3、但是,可移动式无轨焊缝自动跟踪机器人的底部和基座进行对接安装时,二者间的固定孔不易对齐,且通过多组螺栓对二者进行固定的过程较为繁琐,且须借助工具才能对螺栓进行旋紧,导致可移动式无轨焊缝自动跟踪机器人在检修维护时不便于进行拆卸,从而影响其效率的提高。
技术实现思路
1、本实用新型的目的在于提供一种定位结构及可移动式无轨焊缝自动跟踪机器人,以解决上述背景技术中提出的可移动式无轨焊缝自动跟踪机器人的底部和基座进行对接安装时,二者间的固定孔不易对齐,且通过多组螺栓对二者进行固定的过程较为繁琐,且须借助工具才能对螺栓进行旋紧,导致可移动式无轨焊缝自动跟踪机器人在检修维护时不便于进行拆卸,从而影响其效率的提高的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种定位结构,所述定位结构包括:
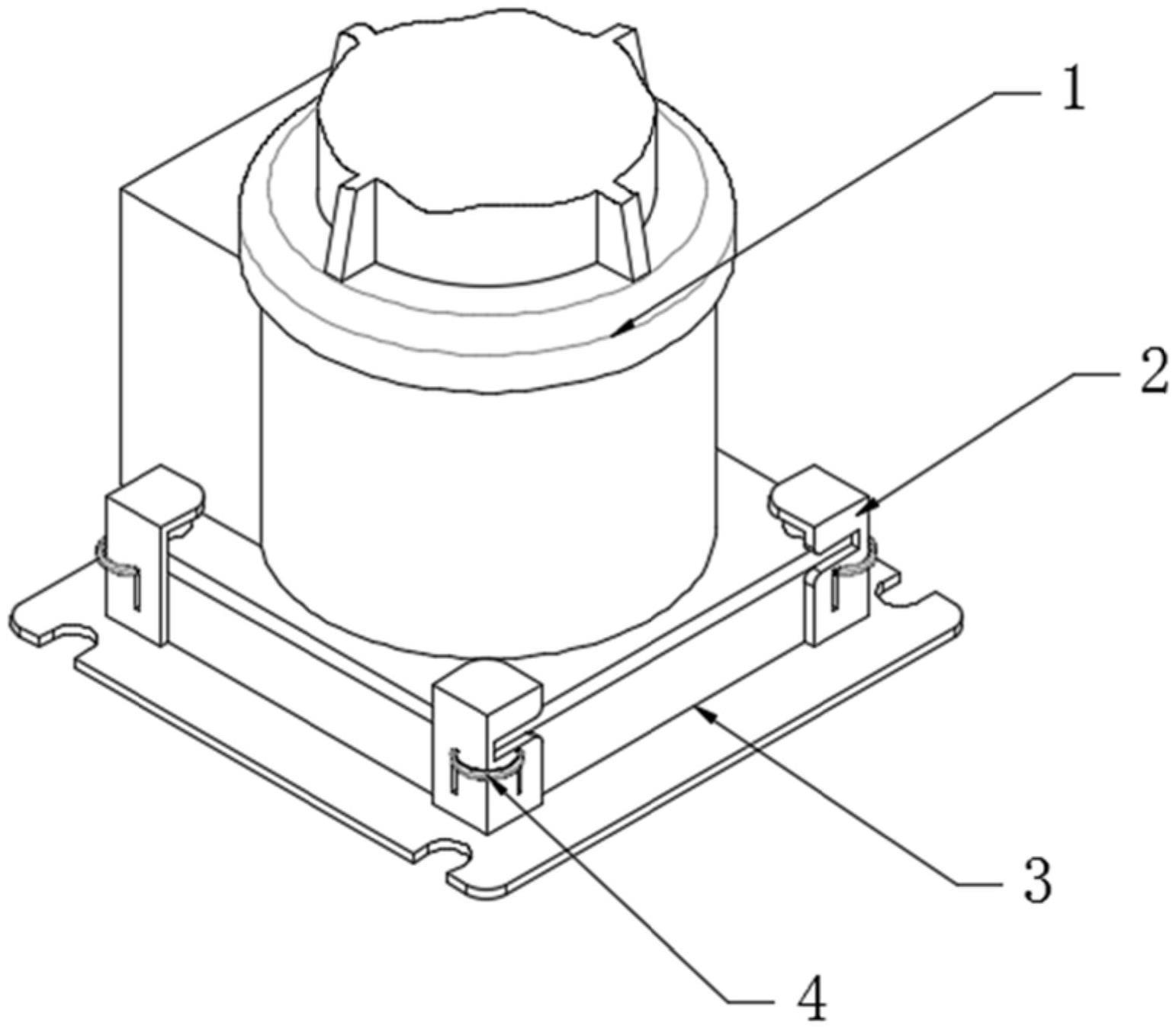
3、基座;基座的内部开设有调节槽,调节槽中设有弹簧,弹簧的上方设有挡板,挡板的表面设有连接杆和定位柱;
4、定位框体;定位框体的表面设有定位环,且定位框体的表面开设有导向槽;及
5、无轨焊缝自动跟踪机器人本体;设于基座的上方。
6、优选的,所述调节槽开设有四组,四组调节槽分别分布在基座的内部四个边角处,且四组调节槽呈对称分布,调节槽的内壁表面开设有滑槽,滑槽贯穿出基座的外侧壁表面。
7、优选的,所述连接杆固定在挡板的侧壁表面,且连接杆的外端贯穿出滑槽,且连接杆的外端设于基座的外侧,且连接杆的外端固定有推杆。
8、优选的,所述定位柱固定在挡板的顶端表面,且定位柱的端部贯穿出基座的顶部表面,无轨焊缝自动跟踪机器人本体的底部表面开设有多个固定孔,且固定孔和定位柱相对应,且定位柱的端部贯穿出固定孔。
9、优选的,所述定位框体设有四组,四组定位框体分别固定在基座的左右两侧边角处,且右侧定位框体的外端面开设有限位口,限位口设于基座的上方,且限位口的高度和无轨焊缝自动跟踪机器人本体底部高度相适配。
10、优选的,所述定位环固定在定位框体的内顶端表面,且定位环设于定位柱的正上方,且定位柱的顶端设于定位环中,定位环的底端抵持在无轨焊缝自动跟踪机器人本体的底部表面。
11、优选的,所述导向槽开设于定位框体的外端表面,且导向槽和滑槽相通,连接杆的外端从导向槽中惯出。
12、一种可移动式无轨焊缝自动跟踪机器人,包括上述的定位结构。
13、与现有技术相比,本实用新型的有益效果是:
14、本实用提出的一种定位结构;通过向下按压推杆带动定位柱向下移动,然后将无轨焊缝自动跟踪机器人本体的底端从限位口中插入,当无轨焊缝自动跟踪机器人本体的内侧端抵持在定位框体的内端面时,其表面开设的固定孔便处于定位柱的正上方,松动推杆使定位柱通过弹簧的弹性顶持向上移动,定位柱向上移动时便从无轨焊缝自动跟踪机器人本体表面开设的固定孔中穿出完成二者间的对接安装,向下按压推杆使定位柱脱离出无轨焊缝自动跟踪机器人本体表面开设的固定孔,即可将其从基座上抽出完成拆卸,二者间对接安装及拆卸的过程较为简便,有利于效率的提高。
技术特征:
1.一种定位结构,其特征在于:所述定位结构包括:
2.根据权利要求1所述的一种定位结构,其特征在于:所述调节槽(9)开设有四组,四组调节槽(9)分别分布在基座(3)的内部四个边角处,且四组调节槽(9)呈对称分布,调节槽(9)的内壁表面开设有滑槽(10),滑槽(10)贯穿出基座(3)的外侧壁表面。
3.根据权利要求2所述的一种定位结构,其特征在于:所述连接杆(11)固定在挡板(12)的侧壁表面,且连接杆(11)的外端贯穿出滑槽(10),且连接杆(11)的外端设于基座(3)的外侧,且连接杆(11)的外端固定有推杆(4)。
4.根据权利要求1所述的一种定位结构,其特征在于:所述定位柱(13)固定在挡板(12)的顶端表面,且定位柱(13)的端部贯穿出基座(3)的顶部表面,无轨焊缝自动跟踪机器人本体(1)的底部表面开设有多个固定孔,且固定孔和定位柱(13)相对应,且定位柱(13)的端部贯穿出固定孔。
5.根据权利要求1所述的一种定位结构,其特征在于:所述定位框体(2)设有四组,四组定位框体(2)分别固定在基座(3)的左右两侧边角处,且右侧定位框体(2)的外端面开设有限位口(5),限位口(5)设于基座(3)的上方,且限位口(5)的高度和无轨焊缝自动跟踪机器人本体(1)底部高度相适配。
6.根据权利要求1所述的一种定位结构,其特征在于:所述定位环(6)固定在定位框体(2)的内顶端表面,且定位环(6)设于定位柱(13)的正上方,且定位柱(13)的顶端设于定位环(6)中,定位环(6)的底端抵持在无轨焊缝自动跟踪机器人本体(1)的底部表面。
7.根据权利要求3所述的一种定位结构,其特征在于:所述导向槽(7)开设于定位框体(2)的外端表面,且导向槽(7)和滑槽(10)相通,连接杆(11)的外端从导向槽(7)中惯出。
8.一种可移动式无轨焊缝自动跟踪机器人,其特征在于:包括上述权利要求1-7任意一项所述的定位结构。
技术总结
本技术涉及焊接装置技术领域,具体为一种定位结构及可移动式无轨焊缝自动跟踪机器人,包括基座,调节槽,弹簧,挡板,连接杆,定位柱,定位框体,定位环,导向槽,无轨焊缝自动跟踪机器人本体;有益效果为:通过向下按压推杆带动定位柱向下移动,然后将机器人的底端从限位口中插入,松动推杆使定位柱通过弹簧的弹性顶持向上移动,定位柱向上移动时便从机器人表面开设的固定孔中穿出完成二者间的对接安装,向下按压推杆使定位柱脱离出机器人表面开设的固定孔,即可将其从基座上抽出完成拆卸,二者间对接安装及拆卸的过程较为简便,有利于效率的提高。
技术研发人员:高佳兴,王禹寰,夏如,赵宸,张洪溥,宋鑫,王伟富,李新宇,徐甜
受保护的技术使用者:内蒙古工业大学
技术研发日:20230128
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!