一种龙门动力平台的制作方法
本技术涉及精密运动平台,尤其是指一种龙门动力平台。
背景技术:
1、近年来,在自动化行业里对复杂零件的加工精度要求越来越高,大部分设备采用龙门结构的精密运动平台为运动模块,用于保证加工零件的精度。龙门结构的精密运动平台包括底座、两个立柱和滑动连接在两个立柱之间的横梁。横梁上滑动连接有第一动子和第二动子。
2、但是现有技术中龙门动力平台的横梁大多采用实心结构,制造成本以及运输成本较高。
技术实现思路
1、为此,本实用新型所要解决的技术问题在于克服现有技术中横梁的制造成本以及运输成本较高的问题。
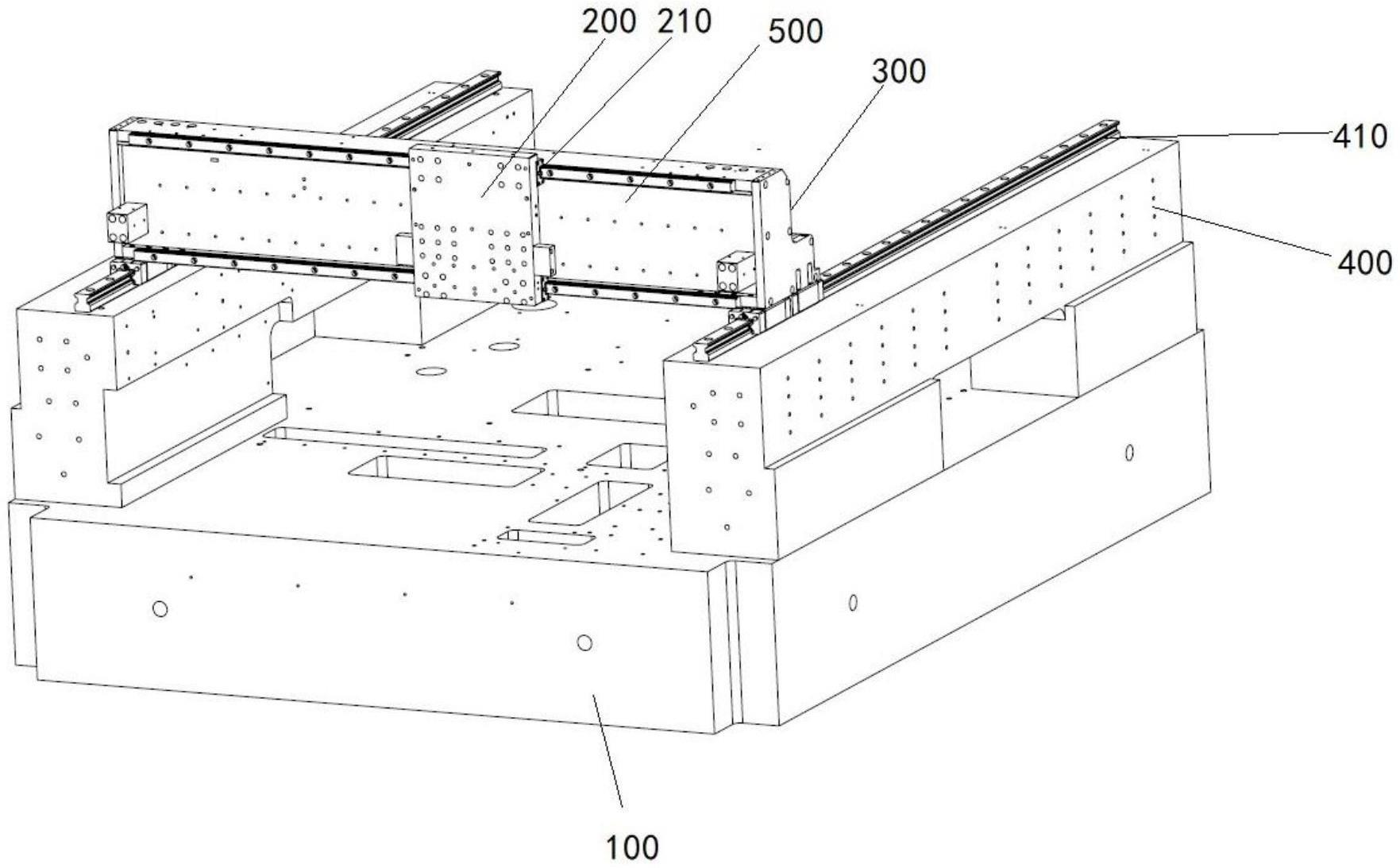
2、为解决上述技术问题,本实用新型提供了一种龙门动力平台,包括:
3、底座、第一动子和第二动子;
4、两个立柱,两个立柱设置在底座的两侧,立柱在y方向延伸;
5、以及横梁,横梁在x方向延伸,x方向与y方向垂直,横梁位于两个立柱之间,且横梁的两端分别与两个立柱滑动连接,横梁的两侧分别滑动连接第一动子和第二动子;横梁包括横梁底座、支撑梁和横梁顶板,支撑梁连接在横梁底座和横梁顶板之间,支撑梁中设有多个支撑通孔,支撑通孔中设有沿其对角线布设的第一x型支撑筋板。
6、在本实用新型的一个实施例中,支撑梁的第一x型支撑筋板与支撑通孔形成四个三角形区域,三角形区域中设有三角形支撑筋板,三角形支撑筋板为空心的三角形结构三角形支撑筋板的三个顶点分别与第一x型支撑筋板的两个侧壁以及支撑通孔的一个侧壁固定连接。
7、在本实用新型的一个实施例中,横梁底座中设置有矩形通孔,矩形通孔中固定连接有第二x型支撑筋板。
8、在本实用新型的一个实施例中,第二x型支撑筋板包括两个筋板,两个筋板沿矩形通孔的对角线设置,两个筋板之间形成的夹角为120°~150°。
9、在本实用新型的一个实施例中,第一x型支撑筋板包括两个筋板,两个筋板之间形成的夹角为45°~75°。
10、在本实用新型的一个实施例中,横梁的横梁底座、支撑梁和横梁顶板,三者采用挤压一体成型。
11、在本实用新型的一个实施例中,横梁底座的一侧以及横梁顶板的一侧均设有第一滑轨,第一滑轨沿x方向延伸,两个第一滑轨位于支撑梁的同一侧;
12、第一动子上设有第一滑块,第一滑块与两个第一滑轨滑动连接。
13、在本实用新型的一个实施例中,横梁底座的另一侧设有沿x方向延伸的第二滑轨,第二动子上设有第二滑块,第二滑块与第二滑轨滑动连接。
14、在本实用新型的一个实施例中,横梁的横梁底座两端的底部均连接有第三滑块,立柱上设有第三滑轨;第三滑块与第三滑轨滑动连接。
15、在本实用新型的一个实施例中,支撑梁为l形结构。
16、本实用新型的上述技术方案相比现有技术具有以下优点:
17、本实用新型所述的龙门动力平台,其在横梁的支撑梁中设置了多个支撑通孔,有效降低了横梁成型所需要原料的量;另外,每个支撑通孔中设有第一x型支撑筋板,这样第一x型支撑筋板与支撑梁形成多个三角形结构以保证横梁的刚性、强度和稳定性;由此可见,本实施例在保证横梁的刚性、强度和稳定性前提下,降低横梁的制造成本和运输成本。
技术特征:
1.一种龙门动力平台,其特征在于:包括:
2.根据权利要求1所述的龙门动力平台,其特征在于:所述支撑梁的第一x型支撑筋板与支撑通孔形成四个三角形区域,所述三角形区域中设有三角形支撑筋板,所述三角形支撑筋板为空心的三角形结构所述三角形支撑筋板的三个顶点分别与第一x型支撑筋板的两个侧壁以及支撑通孔的一个侧壁固定连接。
3.根据权利要求1或2所述的龙门动力平台,其特征在于:所述横梁底座中设置有矩形通孔,所述矩形通孔中固定连接有第二x型支撑筋板。
4.根据权利要求3所述的龙门动力平台,其特征在于:所述第二x型支撑筋板包括两个筋板,所述两个筋板沿所述矩形通孔的对角线设置,所述两个筋板之间形成的夹角为120°~150°。
5.根据权利要求1所述的龙门动力平台,其特征在于:所述第一x型支撑筋板包括两个筋板,所述两个筋板之间形成的夹角为45°~75°。
6.根据权利要求1所述的龙门动力平台,其特征在于:所述横梁的横梁底座、支撑梁和横梁顶板,三者采用挤压一体成型。
7.根据权利要求1所述的龙门动力平台,其特征在于:所述横梁底座的一侧以及所述横梁顶板的一侧均设有第一滑轨,所述第一滑轨沿所述x方向延伸,两个所述第一滑轨位于所述支撑梁的同一侧;
8.根据权利要求1所述的龙门动力平台,其特征在于:所述横梁底座的另一侧设有沿所述x方向延伸的第二滑轨,所述第二动子上设有第二滑块,所述第二滑块与所述第二滑轨滑动连接。
9.根据权利要求1所述的龙门动力平台,其特征在于:所述横梁的横梁底座两端的底部均连接有第三滑块,所述立柱上设有第三滑轨;所述第三滑块与所述第三滑轨滑动连接。
10.根据权利要求1所述的龙门动力平台,其特征在于:所述支撑梁为l形结构。
技术总结
本技术涉及一种龙门动力平台,包括:底座、第一动子、第二动子、两个立柱以及横梁;两个立柱设置在底座的两侧,立柱在Y方向延伸;横梁在X方向延伸,X方向与Y方向垂直,横梁位于两个立柱之间,且横梁的两端分别与两个立柱滑动连接,横梁的两侧分别滑动连接第一动子和第二动子;横梁包括横梁底座、支撑梁和横梁顶板,支撑梁连接在横梁底座和横梁顶板之间,支撑梁中设有多个支撑通孔,支撑通孔中设有沿其对角线布设的第一X型支撑筋板。本技术在保证横梁的刚性、强度和稳定性前提下,降低横梁的制造成本和运输成本。
技术研发人员:虞正浩,周朝渊,黄华,戚保安
受保护的技术使用者:雅科贝思精密机电(上海)有限公司
技术研发日:20230221
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!