一种数控机床用机械手气爪的制作方法
本技术涉及数控设备机械手,特别涉及一种数控机床用机械手气爪。
背景技术:
1、数控机床是数字控制机床的简称,是一种装有程序控制系统的自动化机床,数控机床是按照事先编制好的加工程序,自动地对被加工零件进行加工,我们把零件的加工工艺路线、工艺参数、刀具的运动轨迹、位移量、切削参数以及辅助功能,按照数控机床规定的指令代码及程序格式编写成加工程序单,再把这程序单中的内容记录在控制介质上,然后输入到数控机床的数控装置中,从而指挥机床加工零件。
2、授权公开号为cn210232378u的实用新型专利公开了一种智能数控设备的机械手。该智能数控设备的机械手在使用时,吸盘与机械下臂配合的连贯性较差,导致其使用效果不佳,抓取物体的稳定性较差,因而难以满足实际的使用需求。
技术实现思路
1、本申请的目的在于提供一种数控机床用机械手气爪,以解决上述背景技术中提出的现有智能数控设备的机械手在使用时,吸盘与机械下臂配合的连贯性较差,导致其使用效果不佳,抓取物体的稳定性较差,因而难以满足实际使用需求的问题。
2、为实现上述目的,本申请提供如下技术方案:一种数控机床用机械手气爪,包括托板,所述托板上安装有挪移组件,所述挪移组件用于调整托板的位置,所述托板的下表面固定安装有气缸,所述气缸的外部固定安装有固定块,所述固定块的外部固定套接有套管,所述套管的周侧面固定有三个第一u形块,所述第一u形块的相对内壁之间通过销轴转动连接有机械上臂,所述机械上臂的底端固定有第二u形块,所述第二u形块的相对内壁之间通过销轴转动连接有机械下臂,所述气缸的输出端固定安装有载板,所述载板的周侧面开设有三个预留槽,所述机械下臂的一端通过销轴转动安装在预留槽的内部,所述载板的底部固定有气筒,所述气筒的底部固定连通有吸盘。
3、进一步的,所述托板的下表面固定安装有气泵,所述气泵的进气口端固定连通有导气管,所述导气管的另一端与气筒固定且连通。
4、进一步的,所述导气管上贯穿固定有进气管,所述进气管上设置有阀门。
5、进一步的,所述挪移组件包括矩形框板,所述矩形框板的相对内壁之间通过轴承转动连接有螺纹丝杆,所述螺纹丝杆上螺纹连接有滑块,所述托板固定安装在滑块的底部,所述滑块与矩形框板的内壁滑动配合。
6、进一步的,所述矩形框板的一侧固定安装有驱动电机,所述螺纹丝杆通过驱动电机驱动。
7、进一步的,所述矩形框板的下表面固定有平行设置的两支撑板。
8、进一步的,所述支撑板的下表面固定有两支柱,所述支柱的底端固定有底板。
9、综上,本实用新型的技术效果和优点:
10、1、本实用新型中,通过气缸推动吸盘下移,使得吸盘与被抓物体紧密贴合,气泵沿着导气管将吸盘内部的空气抽出,使得吸盘可以吸住被抓物体,并在气缸收缩的过程中随之上移,气缸的收缩带动三个机械下臂收拢,完成对被抓物体的进一步夹持,使得该机械手气爪的连贯性更好,抓取更加牢固稳定。
11、2、本实用新型中,通过驱动电机驱动螺纹丝杆转动,使得螺纹丝杆以丝杆传动的方式调整滑块的位置,以此带动机械下臂移动,使得该机械手气爪能更好的完成对被抓物体的转移。
技术特征:
1.一种数控机床用机械手气爪,包括托板(1),其特征在于:所述托板(1)上安装有挪移组件,所述挪移组件用于调整托板(1)的位置,所述托板(1)的下表面固定安装有气缸(2),所述气缸(2)的外部固定安装有固定块(3),所述固定块(3)的外部固定套接有套管(4),所述套管(4)的周侧面固定有三个第一u形块(5),所述第一u形块(5)的相对内壁之间通过销轴转动连接有机械上臂(6),所述机械上臂(6)的底端固定有第二u形块(7),所述第二u形块(7)的相对内壁之间通过销轴转动连接有机械下臂(8),所述气缸(2)的输出端固定安装有载板(9),所述载板(9)的周侧面开设有三个预留槽(10),所述机械下臂(8)的一端通过销轴转动安装在预留槽(10)的内部,所述载板(9)的底部固定有气筒(11),所述气筒(11)的底部固定连通有吸盘(12)。
2.根据权利要求1所述的一种数控机床用机械手气爪,其特征在于:所述托板(1)的下表面固定安装有气泵(13),所述气泵(13)的进气口端固定连通有导气管(14),所述导气管(14)的另一端与气筒(11)固定且连通。
3.根据权利要求2所述的一种数控机床用机械手气爪,其特征在于:所述导气管(14)上贯穿固定有进气管(15),所述进气管(15)上设置有阀门。
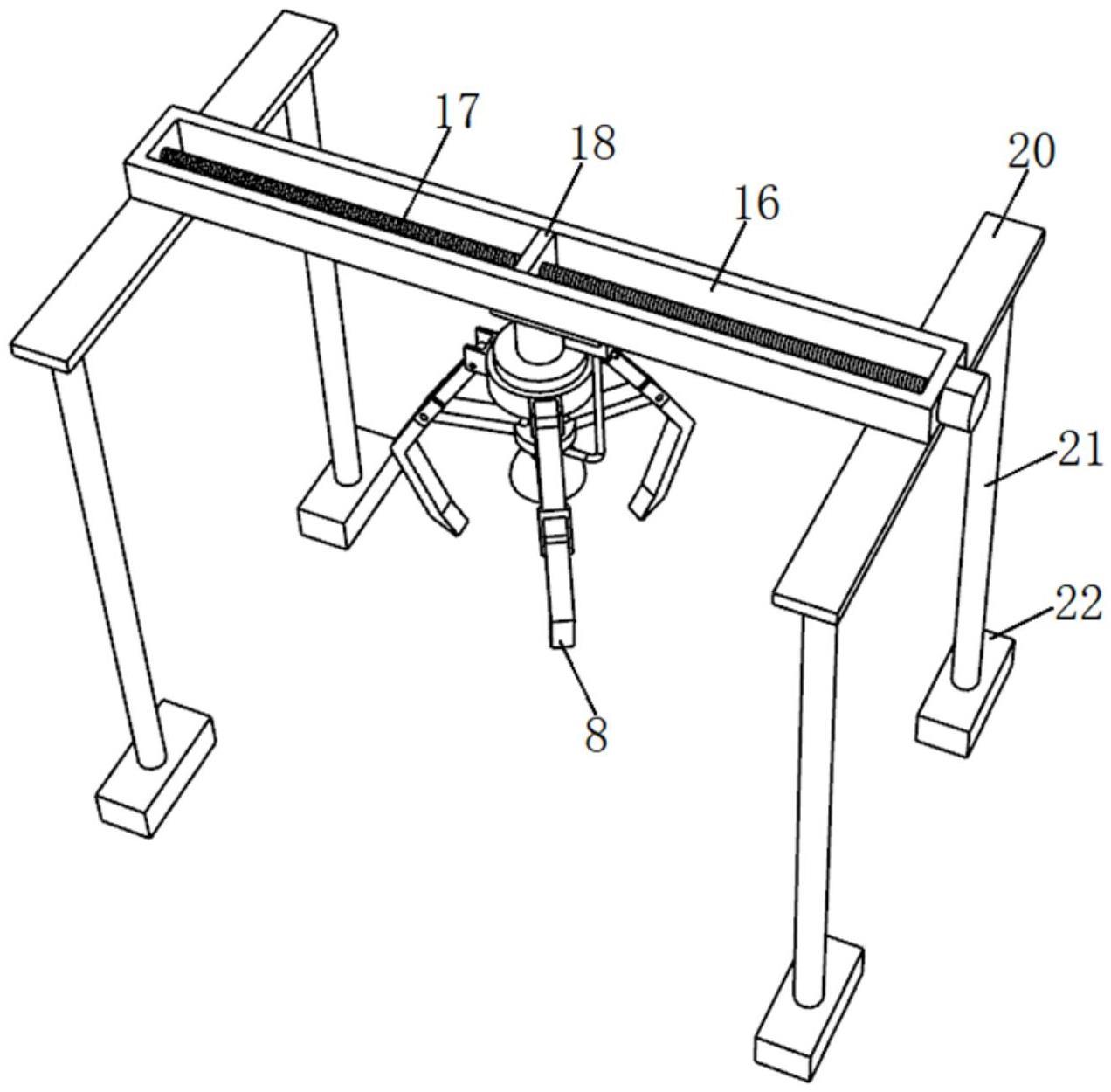
4.根据权利要求1所述的一种数控机床用机械手气爪,其特征在于:所述挪移组件包括矩形框板(16),所述矩形框板(16)的相对内壁之间通过轴承转动连接有螺纹丝杆(17),所述螺纹丝杆(17)上螺纹连接有滑块(18),所述托板(1)固定安装在滑块(18)的底部,所述滑块(18)与矩形框板(16)的内壁滑动配合。
5.根据权利要求4所述的一种数控机床用机械手气爪,其特征在于:所述矩形框板(16)的一侧固定安装有驱动电机(19),所述螺纹丝杆(17)通过驱动电机(19)驱动。
6.根据权利要求4所述的一种数控机床用机械手气爪,其特征在于:所述矩形框板(16)的下表面固定有平行设置的两支撑板(20)。
7.根据权利要求6所述的一种数控机床用机械手气爪,其特征在于:所述支撑板(20)的下表面固定有两支柱(21),所述支柱(21)的底端固定有底板(22)。
技术总结
本技术公开了一种数控机床用机械手气爪,涉及到数控设备机械手技术领域,包括托板,托板上安装有挪移组件,挪移组件用于调整托板的位置,托板的下表面固定安装有气缸,气缸的外部固定安装有固定块,固定块的外部固定套接有套管,套管的周侧面固定有三个第一U形块,第一U形块的相对内壁之间通过销轴转动连接有机械上臂,机械上臂的底端固定有第二U形块。通过气缸推动吸盘下移,使得吸盘与被抓物体紧密贴合,气泵沿着导气管将吸盘内部的空气抽出,使得吸盘可以吸住被抓物体,并在气缸收缩的过程中随之上移,气缸的收缩带动三个机械下臂收拢,完成对被抓物体的进一步夹持,使得该机械手气爪的连贯性更好,抓取更加牢固稳定。
技术研发人员:彭皓琦
受保护的技术使用者:广州市派诺自动化设备有限公司
技术研发日:20230313
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!