一种自动上下料机械臂的制作方法
本技术属于自动上下料机械,具体涉及一种自动上下料机械臂。
背景技术:
1、在数控机床上加工工件时,为了提高工作效率,一般会使用到上下料机械臂,然后通过上下料机械臂上的夹持结构将工件夹持移动,经检索,申请号为“cn202222105658.1”公开了“一种自动上下料机械臂”,其记载了“通过plc可编程控制器、左右移动机构、前后移动部、升降机构和夹持机构的配合,能够使本机械臂在上下料过程中实现自动操作,从而无需人工进行上下料操作,从而更加省时省力”,利用plc可编程控制器、左右移动机构、前后移动部、升降机构和夹持机构的配合确实可以起到自动上下料的目的,但是在实际使用时上下料的范围较短,且为直线移动,在上料时较为麻烦效率较差,基于此,提供一种上下料覆盖范围广且能够无死角地进行转动上料的机械臂是具有较高实用性的。
技术实现思路
1、本实用新型的目的在于提供一种自动上下料机械臂,旨在解决上述技术问题。
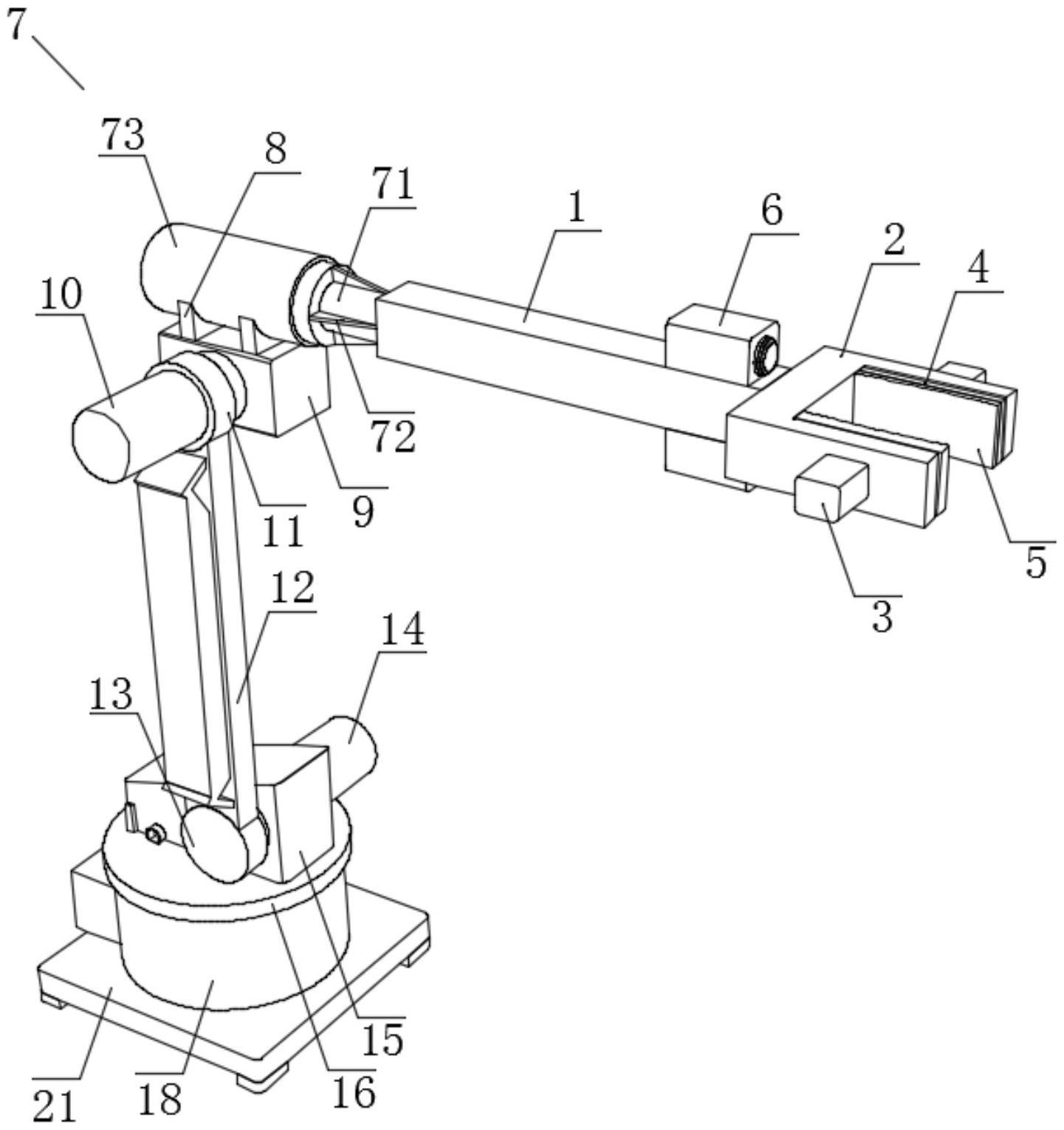
2、为实现上述目的,本实用新型提供如下技术方案:一种自动上下料机械臂,包括连接杆,所述连接杆的一端设置有连接架,所述连接架的两侧均设置有电动缸,两个所述电动缸的输出端均贯穿连接架设置有夹持板,两个所述夹持板的一侧均设置有橡胶垫,所述连接杆的顶部和底部均设置有红外感应器,所述连接杆的另一端转动连接有调节机构。
3、作为本实用新型一种优选的,所述调节机构包括与连接杆的另一端转动连接的转杆,所述转杆外壁设置有若干个固定板,所述转杆的一端设置有第一步进电机输出轴,所述第一步进电机输出轴的一端设置有第一步进电机。
4、作为本实用新型一种优选的,所述第一步进电机的底部设置有两个支撑板,两个所述支撑板的底部设置有连接块,所述连接块的一侧设置有第二步进电机输出轴,所述第二步进电机输出轴的一侧设置有第二步进电机。
5、作为本实用新型一种优选的,所述第二步进电机的外部套设有连接环,所述连接环的底部设置有支撑杆,所述支撑杆的底部设置有固定环,所述固定环的一端设置有第三步进电机输出轴,所述第三步进电机输出轴的一端设置有第三步进电机。
6、作为本实用新型一种优选的,所述第三步进电机的外壁设置有固定块,所述固定块的底部设置有转盘,所述转盘的底部设置有若干个滑杆,若干个所述滑杆的底部滑动连接有底座。
7、作为本实用新型一种优选的,所述底座的内壁底部设置有第四步进电机,所述第四步进电机的两侧均设置有若干个加固板,若干个所述加固板端头均与底座的内壁固定连接,所述第四步进电机的输出轴贯穿底座与转盘固定连接。
8、作为本实用新型一种优选的,所述底座的底部设置有放置板,所述放置板的底部设置有若干个连接垫,所述底座的一端设置有plc可编程控制器。
9、作为本实用新型一种优选的,所述电动缸、红外感应器、第一步进电机、第二步进电机、第三步进电机和第四步进电机均与plc可编程控制器电性连接,所述plc可编程控制器与外接电源电性连接。
10、与现有技术相比,本实用新型的有益效果是:
11、使用人员通过plc可编程控制器打开第四步进电机,使其输出端自转继而带动转盘转动,继而带动机械臂进行调整方位,使机械臂能够覆盖广的区域,且利用转动来调整方位能够无死角进行上料,在两个或以上的上料口时更具备优势,提高了工作效率,且在使用时更加方便快捷。
技术特征:
1.一种自动上下料机械臂,包括连接杆(1),其特征在于,所述连接杆(1)的一端设置有连接架(2),所述连接架(2)的两侧均设置有电动缸(3),两个所述电动缸(3)的输出端均贯穿连接架(2)设置有夹持板(4),两个所述夹持板(4)的一侧均设置有橡胶垫(5),所述连接杆(1)的顶部和底部均设置有红外感应器(6),所述连接杆(1)的另一端转动连接有调节机构(7)。
2.根据权利要求1所述的一种自动上下料机械臂,其特征在于:所述调节机构(7)包括与连接杆(1)的另一端转动连接的转杆(71),所述转杆(71)外壁设置有若干个固定板(72),所述转杆(71)的一端设置有第一步进电机输出轴,所述第一步进电机输出轴的一端设置有第一步进电机(73)。
3.根据权利要求2所述的一种自动上下料机械臂,其特征在于:所述第一步进电机(73)的底部设置有两个支撑板(8),两个所述支撑板(8)的底部设置有连接块(9),所述连接块(9)的一侧设置有第二步进电机输出轴,所述第二步进电机输出轴的一侧设置有第二步进电机(10)。
4.根据权利要求3所述的一种自动上下料机械臂,其特征在于:所述第二步进电机(10)的外部套设有连接环(11),所述连接环(11)的底部设置有支撑杆(12),所述支撑杆(12)的底部设置有固定环(13),所述固定环(13)的一端设置有第三步进电机输出轴,所述第三步进电机输出轴的一端设置有第三步进电机(14)。
5.根据权利要求4所述的一种自动上下料机械臂,其特征在于:所述第三步进电机(14)的外壁设置有固定块(15),所述固定块(15)的底部设置有转盘(16),所述转盘(16)的底部设置有若干个滑杆(17),若干个所述滑杆(17)的底部滑动连接有底座(18)。
6.根据权利要求5所述的一种自动上下料机械臂,其特征在于:所述底座(18)的内壁底部设置有第四步进电机(19),所述第四步进电机(19)的两侧均设置有若干个加固板(20),若干个所述加固板(20)端头均与底座(18)的内壁固定连接,所述第四步进电机(19)的输出轴贯穿底座(18)与转盘(16)固定连接。
7.根据权利要求6所述的一种自动上下料机械臂,其特征在于:所述底座(18)的底部设置有放置板(21),所述放置板(21)的底部设置有若干个连接垫,所述底座(18)的一端设置有plc可编程控制器。
8.根据权利要求7所述的一种自动上下料机械臂,其特征在于:所述电动缸(3)、红外感应器(6)、第一步进电机(73)、第二步进电机(10)、第三步进电机(14)和第四步进电机(19)均与plc可编程控制器电性连接,所述plc可编程控制器与外接电源电性连接。
技术总结
本技术提供一种自动上下料机械臂,包括连接杆,连接杆的一端设置有连接架,连接架的两侧均设置有电动缸,两个电动缸的输出端均贯穿连接架设置有夹持板,两个夹持板的一侧均设置有橡胶垫,连接杆的顶部和底部均设置有红外感应器,连接杆的另一端转动连接有调节机构,本技术有益效果:使用人员通过PLC可编程控制器打开第四步进电机,使其输出端自转继而带动转盘转动,继而带动机械臂进行调整方位,使机械臂能够覆盖广的区域,且利用转动来调整方位能够无死角进行上料,在两个或以上的上料口时更具备优势。
技术研发人员:肖忠玉
受保护的技术使用者:肖忠玉
技术研发日:20230331
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!