具有双翻转工位的一体化机械手焊接装置的制作方法
本申请属于自动焊接设备,尤其是涉及一种具有双翻转工位的一体化机械手焊接装置。
背景技术:
1、焊接机器人是从事焊接的工业机器人。根据国际标准化组织(iso)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(manipulator),具有三个或更多可编程的轴,用于工业自动化领域。现有的自动焊接机械手各个单元模块独立安装设置,往往是分开散放在地面上,需要挪动位置或搬运到其它地方后,导致焊接机械手的坐标全都改变了,需要到现场安装施工并重新进行调试,因此现有的自动焊接机械手存在挪动位置后安装使用不便的问题。
技术实现思路
1、本发明要解决的技术问题是:为解决现有技术中的不足,从而提供一种具有双翻转工位的一体化机械手焊接装置,旨在将机械手焊接装置的部件一体化设计,方便搬运,且挪动位置后不需要重新安装调试。
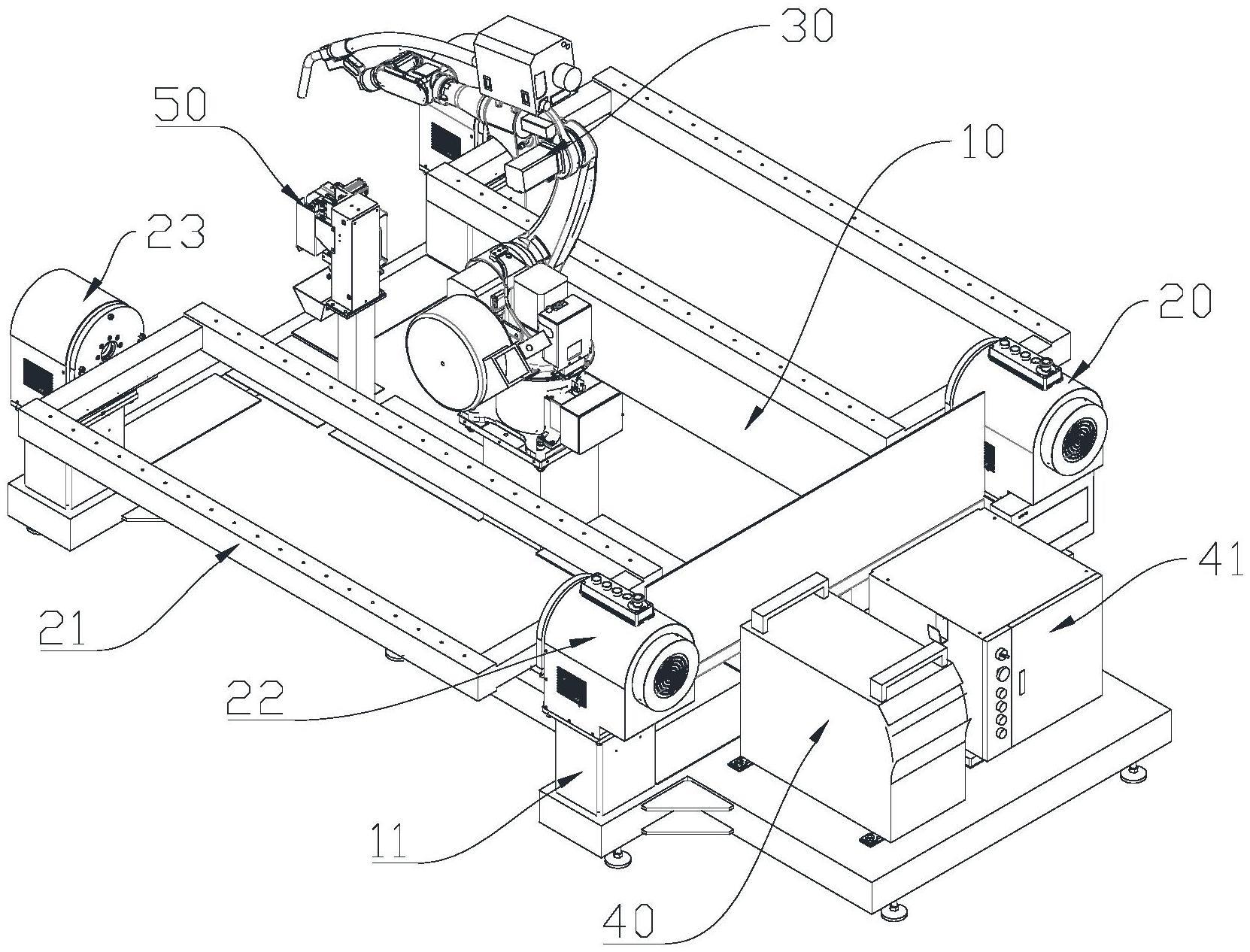
2、本实用新型解决其技术问题所采用的技术方案是:具有双翻转工位的一体化机械手焊接装置,包括:
3、底盘;
4、翻转台,两个所述翻转台分别设置在底盘上,所述翻转台用于装夹并翻转焊接件;
5、机械手,所述机械手固定连接在底盘上,且位于两个所述翻转台的中间,所述机械手上安装有用于焊接翻转台上焊接件的焊枪;
6、所述翻转台上设置有用于装夹焊接件的装夹框,所述装夹框的正反两面都设置为安装面。
7、优选地,本实用新型的具有双翻转工位的一体化机械手焊接装置,还包括焊机和控制柜,所述焊机和控制柜均固定安装在底盘上,所述焊机与焊枪连接。
8、优选地,本实用新型的具有双翻转工位的一体化机械手焊接装置,所述底盘上设置有带有盖板的线槽,所述焊机、控制柜与焊枪的电气管线埋设在线槽内。
9、优选地,本实用新型的具有双翻转工位的一体化机械手焊接装置,还包括清枪站,所述清枪站固定安装在底盘上,所述清枪站用于清理焊枪气体保护套内的飞溅物。
10、优选地,本实用新型的具有双翻转工位的一体化机械手焊接装置,所述翻转台还包括变位机主动轴和变位机从动轴,所述装夹框两端分别安装在变位机主动轴和变位机从动轴的转轴上。
11、优选地,本实用新型的具有双翻转工位的一体化机械手焊接装置,所述焊机、控制柜和机械手与底盘的接触面均设置有绝缘层。
12、本实用新型的有益效果是:
13、(1)稳定性好,本装置的各部件均固定安装在一体化的底盘上,整体搬运,各部件的位置不会发生改变,因此挪动位置后不需要重新安装调试各零部件的安装状态和系统坐标,使用安装方便;
14、(2)方便搬运,各部件均固定安装在一体化的底盘上,搬运时整体打包搬运,不需拆机和组装;
15、(3)双翻转台设计可以在机械手进行焊接的同时在闲置工位进行上下料,提高了工作效率;
16、(4)各部件固定安装在同一个底盘上,方便布线,将线路隐藏在线槽内就不会被焊渣飞溅给烫到了,降低火灾隐患;
17、(5)各部件绝缘连接,各部件之间不会相互串电,避免漏电事故发生。
技术特征:
1.具有双翻转工位的一体化机械手焊接装置,其特征在于,包括:
2.根据权利要求1所述的具有双翻转工位的一体化机械手焊接装置,其特征在于,还包括焊机(40)和控制柜(41),所述焊机(40)和控制柜(41)均固定安装在底盘(10)上,所述焊机(40)与焊枪连接。
3.根据权利要求2所述的具有双翻转工位的一体化机械手焊接装置,其特征在于,所述底盘(10)上设置有带有盖板的线槽,所述焊机(40)、控制柜(41)与焊枪的电气管线埋设在线槽内。
4.根据权利要求1-3任一项所述的具有双翻转工位的一体化机械手焊接装置,其特征在于,还包括清枪站(50),所述清枪站(50)固定安装在底盘(10)上,所述清枪站(50)用于清理焊枪气体保护套内的飞溅物。
5.根据权利要求4所述的具有双翻转工位的一体化机械手焊接装置,其特征在于,所述翻转台(20)还包括变位机主动轴(22)和变位机从动轴(23),所述装夹框(21)两端分别安装在变位机主动轴(22)和变位机从动轴(23)的转轴上。
6.根据权利要求2所述的具有双翻转工位的一体化机械手焊接装置,其特征在于,所述焊机(40)、控制柜(41)和机械手(30)与底盘(10)的接触面均设置有绝缘层。
技术总结
本申请涉及一种具有双翻转工位的一体化机械手焊接装置,底盘;翻转台,两个所述翻转台分别固定安装在底盘上,所述翻转台用于装夹并翻转焊接件;机械手,所述机械手固定连接在底盘上,且位于两个所述翻转台的中间,所述机械手上安装有用于焊接翻转台上焊接件的焊枪;所述翻转台上设置有用于装夹焊接件的装夹框,所述装夹框的正反两面都设置为安装面。稳定性好,本装置的各部件均固定安装在一体化的底盘上,整体搬运,各部件的位置不会发生改变,因此挪动位置后不需要重新安装调试各零部件的安装状态和系统坐标,使用安装方便;方便搬运,各部件均固定安装在一体化的底盘上,搬运时整体打包搬运,不需拆机和组装。
技术研发人员:许映华,许宝明,唐成育
受保护的技术使用者:苏州正四方机器人科技有限公司
技术研发日:20230428
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!