一种用于火箭贮箱箱底加工的复合设备的制作方法
本技术涉及火箭贮箱箱底加工制造,尤其是一种用于火箭贮箱箱底加工的复合设备。
背景技术:
1、随着航空航天业的迅速发展,对于火箭的制造提出了新的要求,而火箭贮箱是一种用于储存燃料和氧化剂等物质的容器,是制造中重要的一个环节,铝合金贮箱必须具有高度的密封性和可靠性,以确保火箭发射过程中的安全性。
2、贮箱是火箭中存储燃料的部件,占到箭体结构重量和空间的50%以上,由箱底、筒段、短壳及其它组件焊接而成,其中箱底是贮箱中关键结构件,也是贮箱中研制难度较大的结构件,目前箱底直径主要有2.25m、3.35m以及5m。传统箱底是由多个瓜瓣及顶盖拼焊而成,随着装备和工艺的不断发展,为了提高箱底可靠性,降低主焊缝数量,箱底成型技术逐渐由瓜瓣拼焊向整体旋压成型发展。
3、目前大型火箭贮箱箱底最新工艺是整体旋压,制造效率大大提升;而箱底上面的燃料加注法兰孔和人孔的加工则是采取五轴机械铣削,箱底上短壳和叉形环之间的连接大多采用人工钻铆方式,但由于大型五轴加工中心价格昂贵,设备成本高,且短壳和叉形环的人工钻铆工艺效率低、精度差,严重制约了火箭贮箱箱底的高效高质低成本制造。
技术实现思路
1、为了克服现有技术中设备成本高和人工钻铆工艺效率低、精度差的缺陷,本实用新型提供了一种用于火箭贮箱箱底加工的复合设备,既能实现法兰孔和人孔的矢量化加工,又能满足短壳和叉形环的钻铆要求,实现铝合金贮箱的高效高质生产。
2、本实用新型解决其技术问题所采用的技术方案是:一种用于火箭贮箱箱底加工的复合设备,包括竖直立板,竖直立板的侧面上部设有横向底座,横向底座的侧面设有横向导轨,横向导轨上设有基座,横向底座的侧面设有能够使得基座沿横向导轨移动的驱动装置,基座的侧面设有七轴机器人,竖直立板的侧面设有底板,底板上端通过旋转变位器连接工作台,贮箱箱底设置于工作台上。通过旋转变位器带动工作台旋转,将箱底摆放在正确的位置,便于七轴机器人加工,控制系统可以根据贮箱的尺寸、形状和位置等参数自动调整七轴机器人的位置和姿态,七轴机器人将被调整到正确的位置,横向底座固定连接在竖直立板上,将基座放置在横向导轨上,使用螺栓将七轴机器人和基座的安装部件紧密连接,确保机器人安装牢固。驱动装置可以控制基座在横向导轨方向上的运动,从而让机器人的运动更加平稳,达到加工精度的要求,以便七轴机器人进行铆接、切割和钻铆等操作,七轴机器人可以沿着任意轴旋转和移动,以便在不同角度和位置执行任务,以确保任务的准确执行,大大提高生产效率和质量。
3、作为本实用新型的进一步改进,竖直立板的底部设有脚座,提高竖直立板的稳定性。
4、作为本实用新型的进一步改进,竖直立板为方形镂空框板,降低制造成本,减轻重量,便于搬运。
5、作为本实用新型的进一步改进,工作台上设有护栏网,防止飞溅。
6、作为本实用新型的进一步改进,七轴机器人包括第一轴、第二轴、第三轴、第四轴、第五轴、第六轴和末端执行器。
7、作为本实用新型的进一步改进,驱动装置为拖链传动,提高传动的稳定性。
8、作为本实用新型的进一步改进,工作台为恒流式液压转台。具有高刚度特性,可克服爬行现象,运转灵敏平稳、具有极高的回转精度和定位精度。
9、与现有技术相比,本实用新型具有的有益效果:本方案通过旋转变位器带动工作台旋转,将箱底摆放在正确的位置,便于七轴机器人加工,控制系统可以根据贮箱的尺寸、形状和位置等参数自动调整七轴机器人的位置和姿态,七轴机器人将被调整到正确的位置,横向底座固定连接在竖直立板上,将基座放置在横向导轨上,使用螺栓将七轴机器人和基座的安装部件紧密连接,确保机器人安装牢固。驱动装置可以控制基座在横向导轨方向上的运动,从而让机器人的运动更加平稳,达到加工精度的要求。以便七轴机器人进行铆接、切割和钻铆等操作,七轴机器人可以沿着任意轴旋转和移动,以便在不同角度和位置执行任务,以确保任务的准确执行,大大提高生产效率和质量。
技术特征:
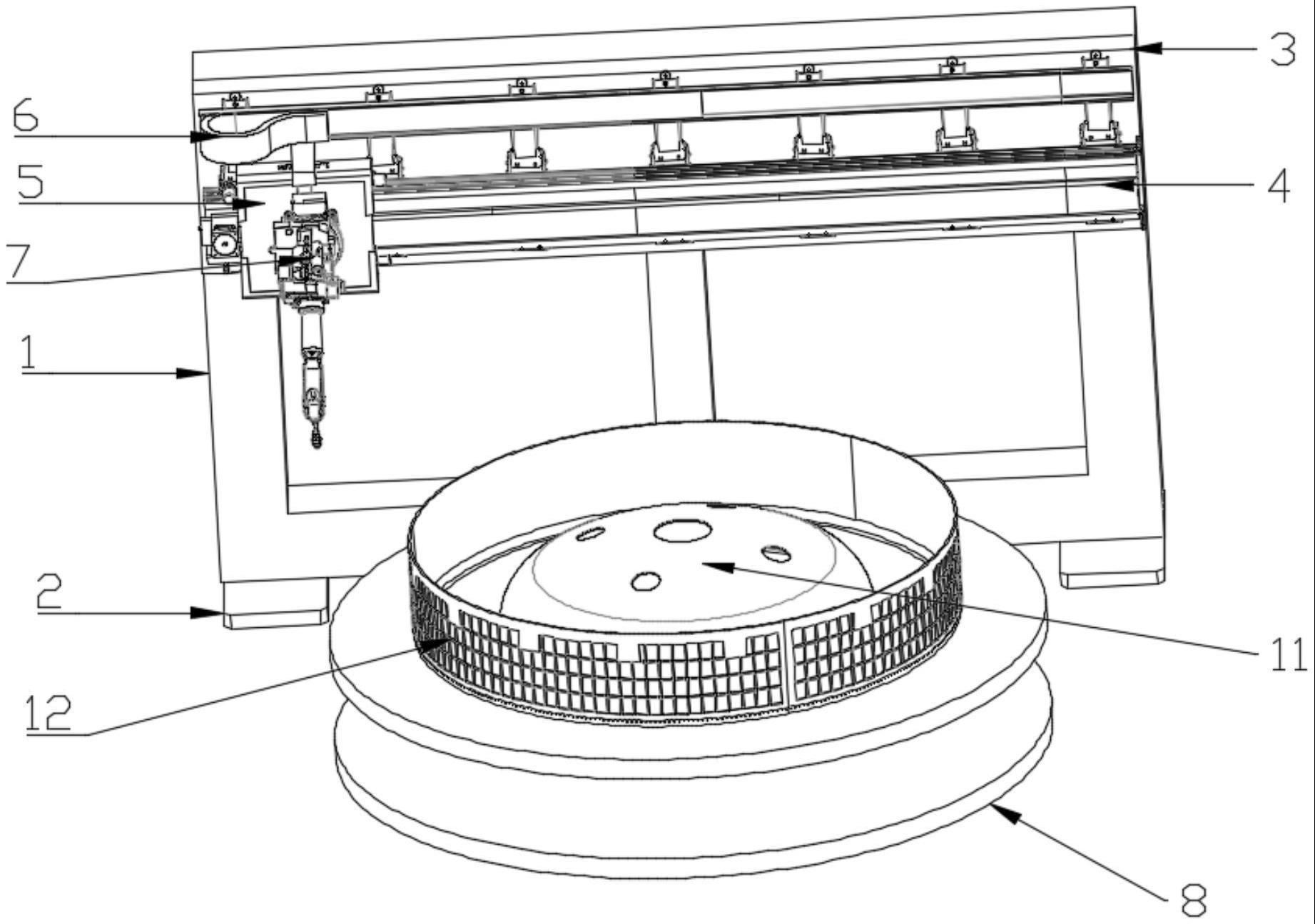
1.一种用于火箭贮箱箱底加工的复合设备,包括竖直立板(1),其特征在于:竖直立板(1)的侧面上部设有横向底座(3),横向底座(3)的侧面设有横向导轨(4),横向导轨(4)上设有基座(5),横向底座(3)的侧面设有能够使得基座(5)沿横向导轨(4)移动的驱动装置(6),基座(5)的侧面设有七轴机器人(7),竖直立板(1)的侧面设有底板(8),底板(8)上端通过旋转变位器(9)连接工作台(10),贮箱箱底(11)设置于工作台(10)上。
2.根据权利要求1所述的一种用于火箭贮箱箱底加工的复合设备,其特征在于:竖直立板(1)的底部设有脚座(2)。
3.根据权利要求2所述的一种用于火箭贮箱箱底加工的复合设备,其特征在于:竖直立板(1)为方形镂空框板。
4.根据权利要求3所述的一种用于火箭贮箱箱底加工的复合设备,其特征在于:工作台(10)上设有护栏网(12)。
5.根据权利要求4所述的一种用于火箭贮箱箱底加工的复合设备,其特征在于:七轴机器人(7)包括第一轴(13)、第二轴(14)、第三轴(15)、第四轴(16)、第五轴(17)、第六轴(18)和末端执行器(19)。
6.根据权利要求5所述的一种用于火箭贮箱箱底加工的复合设备,其特征在于:驱动装置(6)为拖链传动。
7.根据权利要求6所述的一种用于火箭贮箱箱底加工的复合设备,其特征在于:工作台(10)为恒流式液压转台。
技术总结
本技术公开了一种用于火箭贮箱箱底加工的复合设备,涉及火箭贮箱箱底加工制造技术领域,包括竖直立板和横向底座,横向底座的侧面设有横向导轨,旋转变位器带动工作台旋转,将箱底摆放在正确的位置,便于七轴机器人加工,控制系统可以根据贮箱的尺寸、形状和位置等参数自动调整七轴机器人的位置和姿态,七轴机器人将被调整到正确的位置,驱动装置可以控制基座在横向导轨方向上的运动,以便七轴机器人进行铆接、切割和钻铆等操作,七轴机器人可以沿着任意轴旋转和移动,以便在不同角度和位置执行任务,以确保任务的准确执行,提高生产效率和质量。
技术研发人员:张世君,姚君山,谢彬,原瑜,管清杰,王佳文,班学,郭兆飞
受保护的技术使用者:青岛寰宇乾堃航天特种设备有限公司
技术研发日:20230522
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!