一种机械自动化定位装置的制作方法
本技术涉及定位装置,特别涉及一种机械自动化定位装置。
背景技术:
1、在机械加工、轻工业加工等加工工业中,为提高加工效率往往会使用电动或气动等自动加工设备,而在加工过程中为使待加工零件得以精准停留在指定工位进行加工,往往会使用专用的机械自动化定位装置。
2、常见的定位装置进行使用时,大多通过各类传感器控制电机的启停,以此使待加工零件得以在移动至指定工位后停止移动,常见的定位装置在进行使用时具有较好的启停效果,但仍存在一些问题:
3、1、常见的机械自动化定位装置在进行使用时,大多通过传感器与控制电机的启停进行定位,而电机在启停过程中因惯性是的待加工零件易出现一定的位置偏差。
4、2、常见的机械自动化定位装置在进行使用时,由于传动设备的驱动易出现卡顿、或打滑的现象,致使定位装置易出现偏差。
技术实现思路
1、(一)要解决的技术问题
2、本实用新型的目的是提供一种机械自动化定位装置,用以解决现有的机械自动化定位装置易因电机启动的惯性而出现定位偏差的缺陷。
3、(二)
技术实现要素:
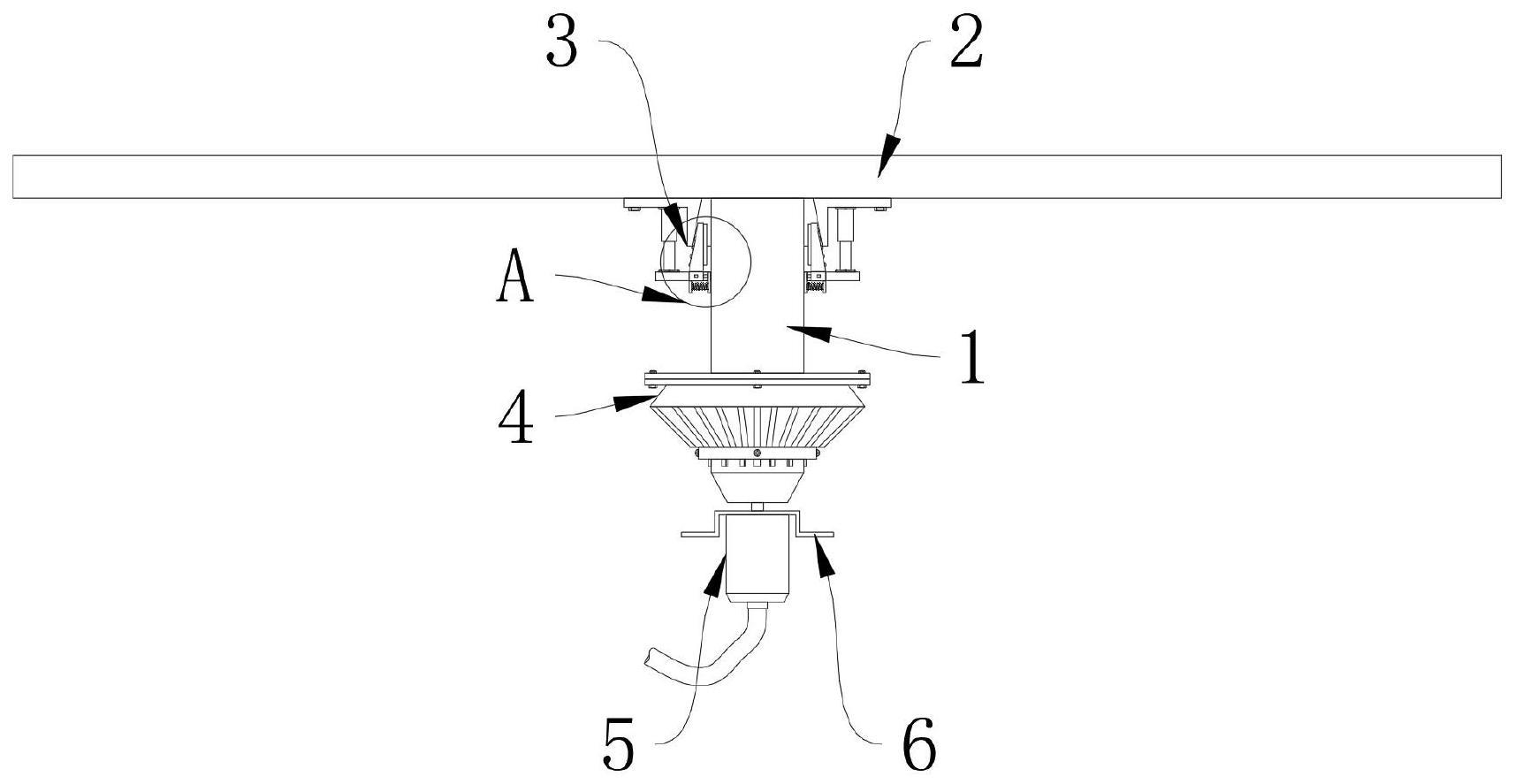
4、为了解决上述技术问题,本实用新型提供如下技术方案:一种机械自动化定位装置,包括传动杆、工位盘和角度传感器,所述传动杆的顶端固定连接有工位盘,所述传动杆外侧壁的下方设置有辅助结构,所述传动杆的底端安装有角度传感器,所述工位盘的底端固定连接有锁死机构,所述锁死机构包括顶盘、弧形内腔、电动伸缩杆、底盘、滑套、滑槽、挤压块、摩擦块、滚珠和弹簧,所述顶盘固定连接于工位盘的底端,所述角度传感器的顶端固定连接有支撑架。
5、使用时,将该定位装置安装于指定加工设备内,并将各待加工零件通过夹持组件环形摆放于工位盘的顶端,随后再将角度传感器、电动伸缩杆与相应控制箱线性连接,由于控制箱控制角度传感器以及电动伸缩杆,通过电机与对应齿盘驱动传动杆进行转动,使位于工位盘顶端环形分布的待加工零件依次转动并经过相应的加工机械组件处,在传动杆转动过程中角度传感器可感知传动杆的转动角度,并将角度信息传递至控制箱,由于工位盘顶端环形均匀分布若干待加工零件,使得传动杆转动一定角度后就有待加工零件转动至加工组件下方进行加工,控制箱根据工位盘顶部环形分布的待加工零件之间分布夹角对进行角度传感器编程,使传动杆在转动一定角度后角度传感器将角度信息传递至控制箱,并由控制箱关闭电机的驱动,使工位盘停止转动,并使相应待加工零件正好位于加工组件下方,以此进行定位加工。
6、优选的,所述顶盘的内部开设有弧形内腔,所述顶盘底端的外侧固定连接有电动伸缩杆,所述电动伸缩杆的底端固定连接有底盘,所述底盘的底端固定连接有滑套,所述底盘的内部开设有滑槽,所述滑槽的内部滑动连接有挤压块,所述挤压块的一侧固定连接有摩擦块,所述挤压块另一侧的内部包裹有滚珠,所述滑套的外侧壁固定连接有弹簧,电动伸缩杆拉动底盘向顶盘方向移动,在此过程中挤压块沿弧形内腔内侧壁插入,并在滑槽与挤压块的滑动结构下使摩擦块逐渐向传动杆的外侧壁方向移动与夹持。
7、优选的,所述电动伸缩杆在顶盘的底端呈环形分布,所述滑套与传动杆呈滑动结构,以此使挤压块的移动更加顺畅。
8、优选的,所述滑槽与挤压块成滑动结构,所述滚珠在挤压块的一侧呈等间距分布,以此使传动杆得以被稳定夹持。
9、优选的,所述辅助结构包括安装盘、锥形齿套、限位凸块和镶嵌槽,所述安装盘固定连接于传动杆外侧壁的下方,所述安装盘的底端安装有锥形齿套,所述传动杆外侧壁的底端固定连接有限位凸块,所述传动杆底端的内部开设有镶嵌槽,在该装置进行使用时电机通过对应齿盘与锥形齿套啮合,以此使传动杆的转动更加稳定。
10、优选的,所述锥形齿套与传动杆呈滑动结构,所述镶嵌槽与角度传感器的顶端呈镶嵌结构,以此使传动杆的转动角度得以被角度传感器检测。
11、优选的,所述限位凸块在传动杆外侧壁的底端固定连接有若干个,且若干个所述限位凸块在传动杆外侧壁的底端呈环形分布。
12、(三)有益效果
13、本实用新型提供的一种机械自动化定位装置,其优点在于:通过设置有锁死机构,在传动杆转动到指定角度后角度传感器将角度信息传递至控制箱,控制箱子在关闭电机的同时使电动伸缩杆快速收缩,并拉动底盘向顶盘方向移动,在此过程中挤压块沿弧形内腔内侧壁插入,并在滑槽与挤压块的滑动结构下使摩擦块逐渐向传动杆的外侧壁方向移动与夹持,使电机停止驱动后摩擦块立即夹持传动杆使工位盘无法因惯性而继续转动,实现了对传动杆的定位锁死;
14、通过设置有辅助结构,在传动杆外侧壁的下方使用螺栓等坚固件使锥形齿套与安装盘进行固定安装,并在限位凸块的作用下使锥形齿套保持稳定,在该装置进行使用时电机通过对应齿盘与锥形齿套啮合,以此进行传动,进而避免出现卡顿或打滑的现象,实现了对定位装置的启停流畅性。
技术特征:
1.一种机械自动化定位装置,包括传动杆(1)、工位盘(2)和角度传感器(5),其特征在于:所述传动杆(1)的顶端固定连接有工位盘(2),所述传动杆(1)外侧壁的下方设置有辅助结构(4),所述传动杆(1)的底端安装有角度传感器(5);
2.根据权利要求1所述的一种机械自动化定位装置,其特征在于:所述顶盘(301)的内部开设有弧形内腔(302),所述顶盘(301)底端的外侧固定连接有电动伸缩杆(303),所述电动伸缩杆(303)的底端固定连接有底盘(304),所述底盘(304)的底端固定连接有滑套(305),所述底盘(304)的内部开设有滑槽(306),所述滑槽(306)的内部滑动连接有挤压块(307),所述挤压块(307)的一侧固定连接有摩擦块(308),所述挤压块(307)另一侧的内部包裹有滚珠(309),所述滑套(305)的外侧壁固定连接有弹簧(310)。
3.根据权利要求2所述的一种机械自动化定位装置,其特征在于:所述电动伸缩杆(303)在顶盘(301)的底端呈环形分布,所述滑套(305)与传动杆(1)呈滑动结构。
4.根据权利要求2所述的一种机械自动化定位装置,其特征在于:所述滑槽(306)与挤压块(307)成滑动结构,所述滚珠(309)在挤压块(307)的一侧呈等间距分布。
5.根据权利要求1所述的一种机械自动化定位装置,其特征在于:所述辅助结构(4)包括安装盘(401)、锥形齿套(402)、限位凸块(403)和镶嵌槽(404),所述安装盘(401)固定连接于传动杆(1)外侧壁的下方,所述安装盘(401)的底端安装有锥形齿套(402),所述传动杆(1)外侧壁的底端固定连接有限位凸块(403),所述传动杆(1)底端的内部开设有镶嵌槽(404)。
6.根据权利要求5所述的一种机械自动化定位装置,其特征在于:所述锥形齿套(402)与传动杆(1)呈滑动结构,所述镶嵌槽(404)与角度传感器(5)的顶端呈镶嵌结构。
7.根据权利要求5所述的一种机械自动化定位装置,其特征在于:所述限位凸块(403)在传动杆(1)外侧壁的底端固定连接有若干个,且若干个所述限位凸块(403)在传动杆(1)外侧壁的底端呈环形分布。
技术总结
本技术公开了一种机械自动化定位装置,包括传动杆、工位盘和角度传感器,传动杆的顶端固定连接有工位盘,传动杆外侧壁的下方设置有辅助结构,传动杆的底端安装有角度传感器,角度传感器的顶端固定连接有支撑架。本技术通过设置有锁死机构,在传动杆转动到指定角度后角度传感器将角度信息传递至控制箱,控制箱子在关闭电机的同时使电动伸缩杆快速收缩,并拉动底盘向顶盘方向移动,在此过程中挤压块沿弧形内腔内侧壁插入,并在滑槽与挤压块的滑动结构下使摩擦块逐渐向传动杆的外侧壁方向移动与夹持,使电机停止驱动后摩擦块立即夹持传动杆使工位盘无法因惯性而继续转动,实现了对传动杆的定位锁死。
技术研发人员:豆江海,付正印,于波,盖鹏举,盖红涛
受保护的技术使用者:豆江海
技术研发日:20230529
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!