一种用于狭窄空间的切割机器人的制作方法
本技术涉及切割机器人,具体是一种用于狭窄空间的切割机器人。
背景技术:
1、切割机器人现有技术中通常使用激光切割。
2、激光切割是利用高功率密度激光束照射被切割材料,使材料很快被加热至汽化温度,蒸发形成孔洞,随着光束对材料的移动,孔洞连续形成宽度很窄的切缝,完成对材料的切割。
3、现有的切割机器人参考专利文件cn216634460u,该专利文件中提出的装置能够实现防崩溅的效果,但是在实际应用中,切割机器人需要在较为狭窄的空间中进行切割工作,为了进一步方便其在狭窄的空间中进行切割工作;为此,我们提供了一种用于狭窄空间的切割机器人解决以上问题。
技术实现思路
1、本实用新型的目的就是为了弥补现有技术的不足,提供了一种用于狭窄空间的切割机器人,能够更加便捷的在狭窄空间中进行切割的工作。
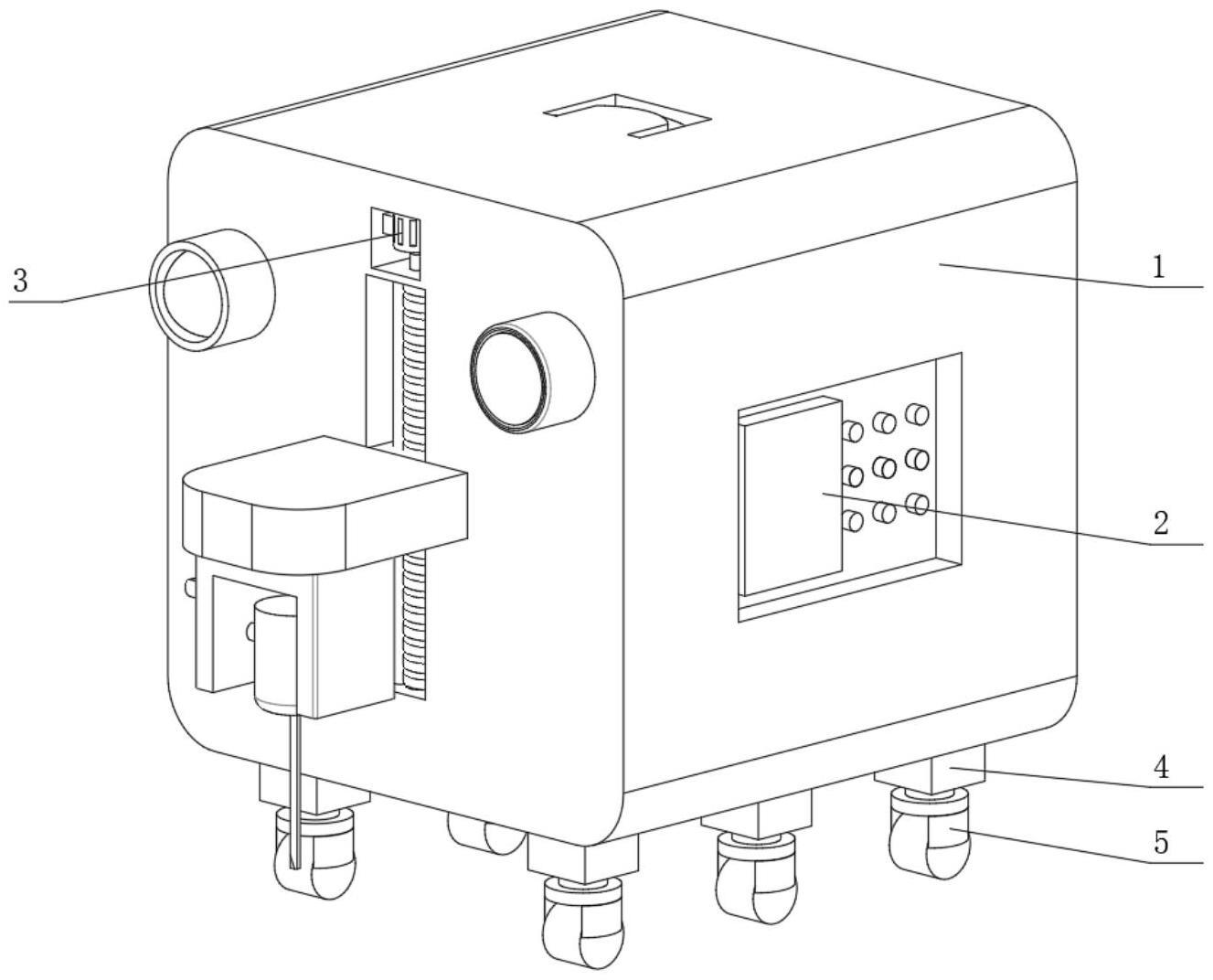
2、为实现上述目的,本实用新型提供如下技术方案:一种用于狭窄空间的切割机器人,包括切割机器人本体,所述切割机器人本体的内部设有切割机构,切割机构包括伺服电机一和螺纹杆,伺服电机一的输出轴端与螺纹杆的转轴端固定连接,螺纹杆的外表面螺纹连接有安装架,安装架的外表面安装有伺服电机二,伺服电机二的输出轴端固定连接有蜗杆,安装架的内壁转动连接有转动杆,转动杆的转轴端固定连接有蜗轮,转动杆的外表面安装有激光切割装置,切割机器人本体的正面安装有摄像头。
3、进一步的,所述切割机器人本体的底面固定连接有若干个支撑柱,每个所述支撑柱的底面均安装有电动轮,每个所述电动轮均与所述切割机器人本体内部的集成电路板电连接,所述支撑柱和所述电动轮的数量均至少为六个,通过设置支撑柱和电动轮可以使该装置能够在较为狭窄的空间中稳定的移动,有益于其切割的工作。
4、进一步的,所述切割机器人本体的内壁安装有智能控制组件,所述智能控制组件与所述切割机器人本体内部的集成电路板电连接,通过设置智能控制组件可以方便工作人员提前对该装置进行的切割工作的调试。
5、进一步的,所述切割机器人本体的上表面开设有凹槽,所述凹槽的内壁安装有把手,所述把手的外表面套设有防护套,通过设置凹槽和把手可以在不扩大该装置体积的前提下,使该装置具备便于携带的功能,提高了实用性。
6、进一步的,所述切割机器人本体的背面开设有若干个散热口,每个所述散热口均为斜向上开设,通过设置散热口可以加速切割机器人本体内部与外部空气交换的速率,有易于该装置长时间在狭窄的空间中进行切割的工作。
7、进一步的,所述切割机器人本体的背面安装有外接端口,所述外接端口与所述切割机器人本体内部的集成电路板电连接,通过设置外接端口可以方便导出切割数据,同时也方便对该装置进行充电续航的工作。
8、进一步的,所述切割机器人本体的内壁固定连接有两个相对称的限位杆,两个所述限位杆的外表面均与所述安装架的内壁滑动连接,通过设置限位杆可以使安装架在移动的时候更加的稳定,从而方便调整激光切割装置的位置,使其能够在狭窄的空间中进行更加灵活的切割工作。
9、进一步的,所述切割机器人本体的正面安装有补光灯,所述补光灯与所述切割机器人本体内部的集成电路板电连接,通过设置补光灯可以更加方便摄像头的工作。
10、与现有技术相比,该用于狭窄空间的切割机器人具备如下有益效果:
11、1、本实用新型通过设置切割机器人本体和切割机构之间相互配合,该装置能够在狭窄的空间中进行移动,通过摄像头和补光灯可以观察狭窄空间中的情况,之后可以通过启动伺服电机一对安装架和激光切割装置的高度进行调整,启动伺服电机二可以对激光切割装置的角度进行调整,最后可以通过激光切割装置在狭窄的空间中进行切割的工作,综上,该装置具备在狭窄空间中进行切割的工作,并且可以灵活的根据狭窄空间中的实际情况,对激光切割装置的位置进行灵活的调整,有利于切割的工作。
12、2、本实用新型通过设置支撑柱和电动轮可以使该装置能够在较为狭窄的空间中稳定的移动,有益于其切割的工作,通过设置智能控制组件可以方便工作人员提前对该装置进行的切割工作的调试,通过设置凹槽和把手可以在不扩大该装置体积的前提下,使该装置具备便于携带的功能,提高了实用性,通过设置散热口可以加速切割机器人本体内部与外部空气交换的速率,有易于该装置长时间在狭窄的空间中进行切割的工作,通过设置外接端口可以方便导出切割数据,同时也方便对该装置进行充电续航的工作,通过设置限位杆可以使安装架在移动的时候更加的稳定,从而方便调整激光切割装置的位置,使其能够在狭窄的空间中进行更加灵活的切割工作,通过设置补光灯可以更加方便摄像头的工作。
技术特征:
1.一种用于狭窄空间的切割机器人,包括切割机器人本体(1),其特征在于:所述切割机器人本体(1)的内部设有切割机构(3),切割机构(3)包括伺服电机一(301)和螺纹杆(302),伺服电机一(301)的输出轴端与螺纹杆(302)的转轴端固定连接,螺纹杆(302)的外表面螺纹连接有安装架(303),安装架(303)的外表面安装有伺服电机二(304),伺服电机二(304)的输出轴端固定连接有蜗杆(305),安装架(303)的内壁转动连接有转动杆(307),转动杆(307)的转轴端固定连接有蜗轮(306),转动杆(307)的外表面安装有激光切割装置(308),切割机器人本体(1)的正面安装有摄像头(309)。
2.根据权利要求1所述的一种用于狭窄空间的切割机器人,其特征在于:所述切割机器人本体(1)的底面固定连接有若干个支撑柱(4),每个所述支撑柱(4)的底面均安装有电动轮(5),每个所述电动轮(5)均与所述切割机器人本体(1)内部的集成电路板电连接,所述支撑柱(4)和所述电动轮(5)的数量均至少为六个。
3.根据权利要求1所述的一种用于狭窄空间的切割机器人,其特征在于:所述切割机器人本体(1)的内壁安装有智能控制组件(2),所述智能控制组件(2)与所述切割机器人本体(1)内部的集成电路板电连接。
4.根据权利要求1所述的一种用于狭窄空间的切割机器人,其特征在于:所述切割机器人本体(1)的上表面开设有凹槽(6),所述凹槽(6)的内壁安装有把手(7),所述把手(7)的外表面套设有防护套。
5.根据权利要求1所述的一种用于狭窄空间的切割机器人,其特征在于:所述切割机器人本体(1)的背面开设有若干个散热口(8),每个所述散热口(8)均为斜向上开设。
6.根据权利要求1所述的一种用于狭窄空间的切割机器人,其特征在于:所述切割机器人本体(1)的背面安装有外接端口(9),所述外接端口(9)与所述切割机器人本体(1)内部的集成电路板电连接。
7.根据权利要求1所述的一种用于狭窄空间的切割机器人,其特征在于:所述切割机器人本体(1)的内壁固定连接有两个相对称的限位杆(311),两个所述限位杆(311)的外表面均与所述安装架(303)的内壁滑动连接。
8.根据权利要求1所述的一种用于狭窄空间的切割机器人,其特征在于:所述切割机器人本体(1)的正面安装有补光灯(310),所述补光灯(310)与所述切割机器人本体(1)内部的集成电路板电连接。
技术总结
本技术公开了一种用于狭窄空间的切割机器人,涉及切割机器人技术领域,包括切割机器人本体,所述切割机器人本体的内部设有切割机构,切割机构包括伺服电机一和螺纹杆。它能够通过设置切割机器人本体和切割机构之间相互配合,该装置能够在狭窄的空间中进行移动,通过摄像头和补光灯可以观察狭窄空间中的情况,之后可以通过启动伺服电机一对安装架和激光切割装置的高度进行调整,启动伺服电机二可以对激光切割装置的角度进行调整,最后可以通过激光切割装置在狭窄的空间中进行切割的工作,综上,该装置具备在狭窄空间中进行切割的工作,并且可以灵活的根据狭窄空间中的实际情况,对激光切割装置的位置进行灵活的调整。
技术研发人员:陈才安
受保护的技术使用者:火星机器人(武汉)有限公司
技术研发日:20230607
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!