一种焊接用机器人定位工装的制作方法
本技术涉及焊接,尤其涉及一种焊接用机器人定位工装。
背景技术:
1、焊接:也称作熔接、镕接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术。
2、但是现有技术中,部分传统的焊接用机器人定位工装在物件一面的部位焊接完成后,需要对另一面进行焊接时,需要工作人员对物件进行重新固定,导致工作人员的工作量增加,且部分传统的设备在焊接时对焊接面附近的焊接处进行处理时,需要重新对物件的固定位置进行调整,导致设备的使用效率降低。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的问题。
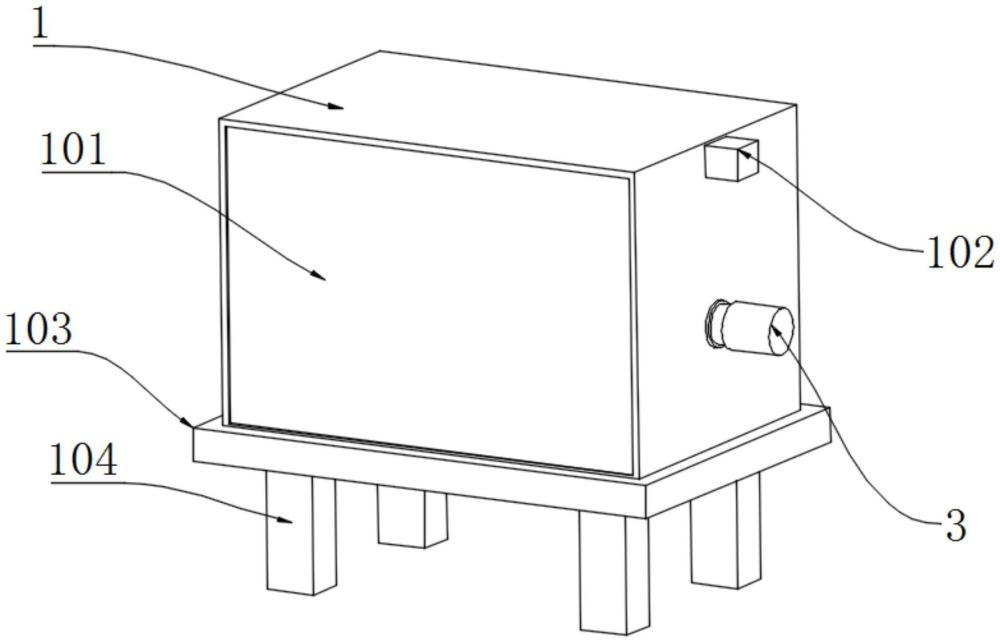
2、为了实现上述目的,本实用新型采用了如下技术方案:一种焊接用机器人定位工装,包括:箱体,所述箱体表面的一侧固定安装有机盒,所述机盒的内腔设置有传动装置,所述箱体表面的两侧设置有固定装置,所述箱体内腔的顶部固定安装有滑轨,所述滑轨的内腔连接有滑块,所述滑块的表面设置有移动装置。
3、作为一种优选的实施方式,所述箱体表面的一侧固定安装有观察窗,所述箱体的底部固定安装有支撑板,所述支撑板底部表面的四端均固定安装有支撑腿。
4、作为一种优选的实施方式,所述支撑板顶部表面的两端均固定安装有连接板,所述滑轨内腔的两端均固定安装有限位板。
5、作为一种优选的实施方式,所述传动装置包括双向电机,所述双向电机的一端固定安装在机盒的内腔,所述双向电机的输出端固定安装有螺纹杆,所述螺纹杆的表面通过轴承贯穿连接在箱体的表面,所述螺纹杆的表面通过轴承贯穿连接在两个限位板的表面,所述螺纹杆的表面螺纹贯穿在滑块的表面,所述螺纹杆的一端通过轴承连接在箱体内腔的表面。
6、作为一种优选的实施方式,所述固定装置包括两个把手,两个所述把手的一端均固定安装有连接杆,两个所述连接杆的表面均通过轴承贯穿连接在箱体的表面,两个所述连接杆的表面均通过轴承贯穿连接在连接板的表面,两个所述连接杆的一端均固定安装有放置盒,两个所述放置盒的内腔均固定安装有多个阻尼器,多个所述阻尼器的表面均连接有弹簧,多个所述阻尼器平均分成两组,两组所述阻尼器的一端均固定安装有挡板,两个所述挡板的表面均贴合在两个放置盒的表面。
7、作为一种优选的实施方式,所述移动装置包括收纳盒,所述收纳盒的一端固定安装在滑块表面的一端,所述收纳盒的内腔连接有移动块,所述移动块的一端固定安装有焊接头,所述收纳盒内腔表面的两侧均固定安装有液压撑杆,两个所述液压撑杆的一端贴合在移动块的表面。
8、与现有技术相比,本实用新型的优点和积极效果在于,
9、1、本实用新型,打开设备将需要焊接物件的两端放置到放置盒内,物件的两端贴合在挡板表面,安装在放置盒内部的阻尼器能够使物件拿走后挡板进行复位能够对物件进行固定的作用,安装在放置盒一端的连接杆,工作人员使用安装在一端的把手能够使得物件进行翻转,能够方便对另一面的物件进行焊接。
10、2、本实用新型,物件固定完成后,通过外部控制器启动双向电机能够使安装在一端螺纹杆进行转动,使得滑块沿滑轨移动,安装在两端的限位板能够对滑块进行限位,能够方便工作人员对焊接头的水平位置进行调整,焊接头移动到指定位置后,通过外部控制器能够对物件进行焊接,通过外部控制器启动液压撑杆能够控制移动块进行移动,能够方便工作人员对焊接头的位置进行微调,能够方便工作人员进行使用,降低了工作人员的工作量,提高了工作效率。
技术特征:
1.一种焊接用机器人定位工装,其特征在于,包括:箱体(1),所述箱体(1)表面的一侧固定安装有机盒(102),所述机盒(102)的内腔设置有传动装置(2),所述箱体(1)表面的两侧设置有固定装置(3),所述箱体(1)内腔的顶部固定安装有滑轨(105),所述滑轨(105)的内腔连接有滑块(106),所述滑块(106)的表面设置有移动装置(4)。
2.根据权利要求1所述的一种焊接用机器人定位工装,其特征在于:所述箱体(1)表面的一侧固定安装有观察窗(101),所述箱体(1)的底部固定安装有支撑板(103),所述支撑板(103)底部表面的四端均固定安装有支撑腿(104)。
3.根据权利要求2所述的一种焊接用机器人定位工装,其特征在于:所述支撑板(103)顶部表面的两端均固定安装有连接板(107),所述滑轨(105)内腔的两端均固定安装有限位板(108)。
4.根据权利要求1所述的一种焊接用机器人定位工装,其特征在于:所述传动装置(2)包括双向电机(201),所述双向电机(201)的一端固定安装在机盒(102)的内腔,所述双向电机(201)的输出端固定安装有螺纹杆(202),所述螺纹杆(202)的表面通过轴承贯穿连接在箱体(1)的表面,所述螺纹杆(202)的表面通过轴承贯穿连接在两个限位板(108)的表面,所述螺纹杆(202)的表面螺纹贯穿在滑块(106)的表面,所述螺纹杆(202)的一端通过轴承连接在箱体(1)内腔的表面。
5.根据权利要求1所述的一种焊接用机器人定位工装,其特征在于:所述固定装置(3)包括两个把手(301),两个所述把手(301)的一端均固定安装有连接杆(302),两个所述连接杆(302)的表面均通过轴承贯穿连接在箱体(1)的表面,两个所述连接杆(302)的表面均通过轴承贯穿连接在连接板(107)的表面,两个所述连接杆(302)的一端均固定安装有放置盒(303),两个所述放置盒(303)的内腔均固定安装有多个阻尼器(305),多个所述阻尼器(305)的表面均连接有弹簧,多个所述阻尼器(305)平均分成两组,两组所述阻尼器(305)的一端均固定安装有挡板(304),两个所述挡板(304)的表面均贴合在两个放置盒(303)的表面。
6.根据权利要求1所述的一种焊接用机器人定位工装,其特征在于:所述移动装置(4)包括收纳盒(401),所述收纳盒(401)的一端固定安装在滑块(106)表面的一端,所述收纳盒(401)的内腔连接有移动块(402),所述移动块(402)的一端固定安装有焊接头(403),所述收纳盒(401)内腔表面的两侧均固定安装有液压撑杆(404),两个所述液压撑杆(404)的一端贴合在移动块(402)的表面。
技术总结
本技术提供一种焊接用机器人定位工装,涉及焊接技术领域,包括:箱体,所述箱体表面的一侧固定安装有机盒,所述机盒的内腔设置有传动装置。本技术,打开设备将需要焊接物件的两端放置到放置盒内,物件的两端贴合在挡板表面,放置盒内部的阻尼器使物件拿走后挡板进行复位,安装在放置盒一端的连接杆,工作人员使用安装在一端的把手能够使得物件进行翻转,对另一面的物件进行焊接,物件固定完成后,启动双向电机能够使安装在一端螺纹杆进行转动,使得滑块沿滑轨移动,安装在两端的限位板能够对滑块进行限位,对焊接头的水平位置进行调整,焊接头移动到指定位置后,启动液压撑杆能够控制移动块进行移动,对焊接头的位置进行微调。
技术研发人员:邓南坪,王杰
受保护的技术使用者:湖南华数智能技术有限公司
技术研发日:20230619
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!