地铁站连续墙钢筋网智能焊接机器人系统的制作方法
本技术涉及智能焊接设备,具体为地铁站连续墙钢筋网智能焊接机器人系统。
背景技术:
1、当下,地铁交通的出现为人们的生活提供了极大的便利,缓解了交通压力,在地铁的修建工作中,连续墙是地铁站的主要支撑架构,地铁站在地下有多深,连续墙就要求有多深,有的可能达到几十米,而为了保证连续墙结构的稳定性,其钢筋网架必须是从顶到底连续的一整个,这就使得钢筋网只能是通过钢筋的现场焊接制成,目前来说,钢筋网的焊制通常是由焊接工人来完成,即按规定距离铺设好经向(连续墙长度方向)钢筋,然后将纬向(连续墙宽度方向)钢筋按规定距离沿经向钢筋铺设,并逐根完成经向钢筋和纬向钢筋的焊接工作,这就使得钢筋网的焊制需要较大的工作量,提高了用工成本,同时,由于钢筋网的焊制具备大量的焊点,这就使得钢筋网的焊制时间也将大大延长,甚至会出现漏焊现象。
技术实现思路
1、为解决上述背景技术中存在的技术问题,本实用新型提供了地铁站连续墙钢筋网智能焊接机器人系统。
2、本实用新型技术方案如下:
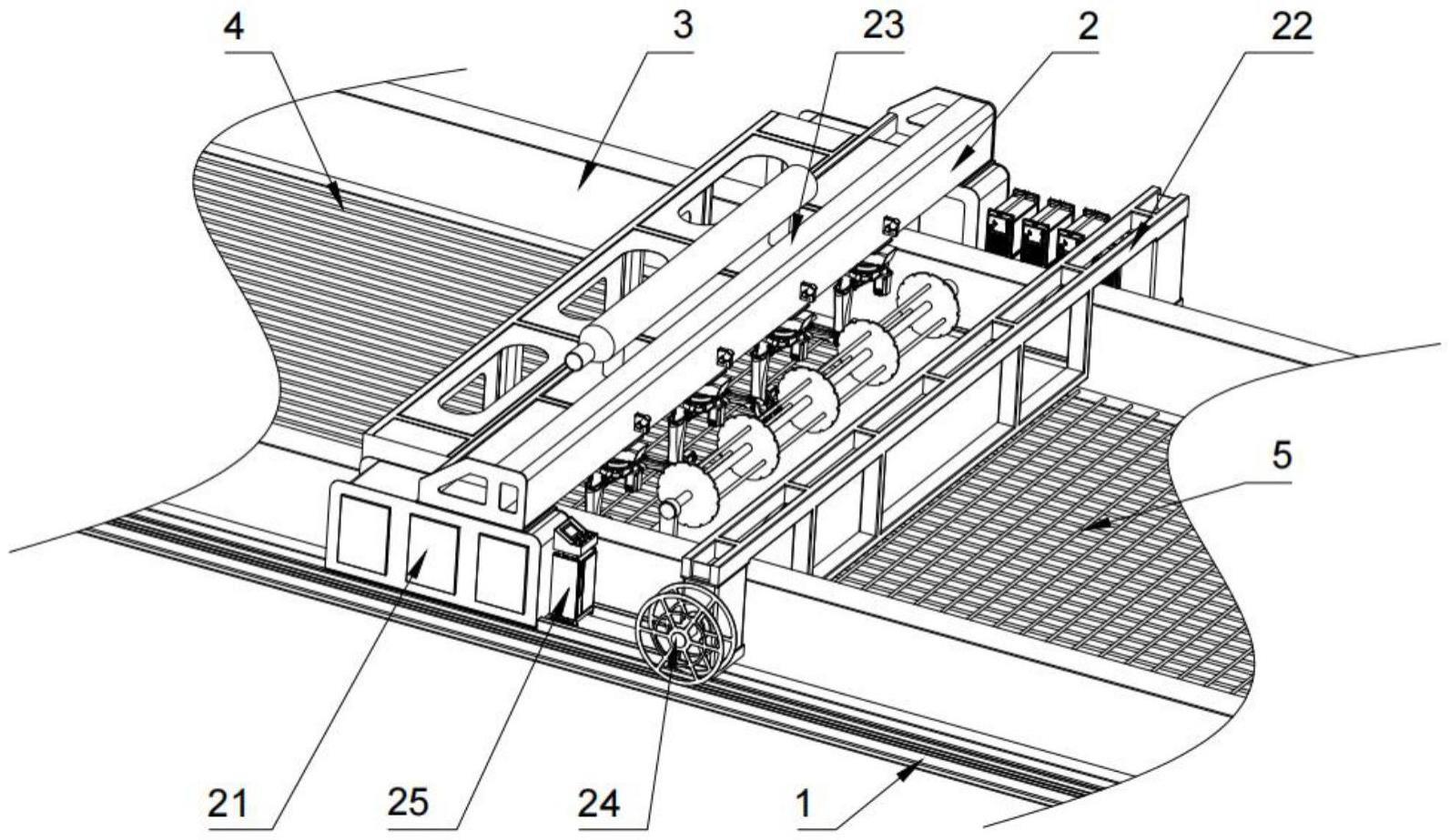
3、地铁站连续墙钢筋网智能焊接机器人系统,包括地轨及其上设置的能够沿地轨移动的车架,所述车架上前后设有理料装置和焊接装置,所述理料装置包括垂直于车架移动方向设置的钢筋储放平台,所述钢筋储放平台后侧设有能够拨动钢筋逐根落下的顺料机构,所述焊接装置包括垂直于车架移动方向设置的结构架,其下方沿其长度方向设有若干个机械臂,所述焊接装置还包括与机械臂数量相同的若干焊接机,若干所述焊接机的机身部分设置在车架和/或结构架上,焊接头固定在所述机械臂的外端,在进行焊接工作时,能够预先按照地轨的铺设方向和位置将工字钢铺设好,并按规定距离将经向钢筋平行于工字钢铺设好,然后将成捆的纬向钢筋放置在钢筋储放平台上,车架的移动配合顺料机构的动作能够将纬向钢筋按预设的距离逐个拨下,配合焊接机完成焊点位置(经向钢筋纬向钢筋交叉处)的焊接工作,降低了工人劳动成本,避免了漏焊现象的发生,同时多个机械臂和焊接机配合进行焊接工作的方式,有效保证了钢筋网的焊接效率。
4、如上所述的地铁站连续墙钢筋网智能焊接机器人系统,就所述顺料机构的结构具体来说,其包括垂直于车架移动方向设置的顺料轴及与其传动连接的顺料驱动机,所述顺料轴上间隙设有若干与其同轴心的顺料盘,所述顺料盘外圈设有卡料槽,顺料轴的转动能够带动顺料盘转动,进而在卡料槽作用下将纬向钢筋逐根播下,使得纬向钢筋的铺设能够自动化完成。
5、进一步的,所述钢筋储放平台上设有朝向后侧倾斜的顺料坡,所述顺料盘和顺料坡的间隙设置为能且仅能有一根钢筋通过卡料槽落下,使得卡料槽能够顺利与纬向钢筋配合完成纬向钢筋逐根顺料的工作,避免漏放或多放现象的发生。
6、为了保证各顺料盘之间位置的相对稳定性,防止出现卡料槽错位的现象,相邻所述顺料盘之间还设有加强杆。
7、如上所述的地铁站连续墙钢筋网智能焊接机器人系统,所述结构架上还设有防护罩,所述防护罩上方设有烟尘处理机构,防止焊接烟尘扩散,使机器人系统的使用更加环保。
8、进一步的,所述焊接机为二氧化碳气体保护焊机,使得焊接工作的进行更加简单,与本实用新型机器人系统更加适配。
9、进一步的,所述结构架上还设有清枪站,保证焊接机的焊接工作能够正常进行。
10、需要说明的是,所述清枪站至少具备剪丝、防溅剂喷涂和内渣清理功能。
11、为了方便观察焊接工作情况,所述防护罩上设有防弧光玻璃。
12、如上所述的地铁站连续墙钢筋网智能焊接机器人系统,其还包括能够控制机器人系统整体运行的控制器,所述车架一侧设有集线盘,其上缠绕有缆线,且缆线一端与控制器电连接,使得车架移动时,能够对缆线提供更好的收放效果。
13、本实用新型的有益效果在于:本实用新型为地铁站连续墙钢筋网智能焊接机器人系统,在进行焊接工作时,能够预先按照地轨的铺设方向和位置将工字钢铺设好,并按规定距离将经向钢筋平行于工字钢铺设好,然后将成捆的纬向钢筋放置在钢筋储放平台上,车架的移动配合顺料机构的动作能够将纬向钢筋按预设的距离逐个拨下,配合焊接机完成焊点位置(经向钢筋纬向钢筋交叉处)的焊接工作,降低了工人劳动成本,避免了漏焊现象的发生,同时多个机械臂和焊接机配合进行焊接工作的方式,有效保证了钢筋网的焊接效率。
技术特征:
1.地铁站连续墙钢筋网智能焊接机器人系统,其特征在于,包括地轨(1)及其上设置的能够沿地轨(1)移动的车架(21),所述车架(21)上前后设有理料装置(22)和焊接装置(23);
2.根据权利要求1所述的地铁站连续墙钢筋网智能焊接机器人系统,其特征在于,所述顺料机构(222)包括垂直于车架(21)移动方向设置的顺料轴(2221)及与其传动连接的顺料驱动机,所述顺料轴(2221)上间隙设有若干与其同轴心的顺料盘(2222),所述顺料盘(2222)外圈设有卡料槽。
3.根据权利要求2所述的地铁站连续墙钢筋网智能焊接机器人系统,其特征在于,所述钢筋储放平台(221)上设有朝向后侧倾斜的顺料坡,所述顺料盘(2222)和顺料坡的间隙设置为能且仅能有一根钢筋通过卡料槽落下。
4.根据权利要求3所述的地铁站连续墙钢筋网智能焊接机器人系统,其特征在于,相邻所述顺料盘(2222)之间设有加强杆(2223)。
5.根据权利要求1-4任一项所述的地铁站连续墙钢筋网智能焊接机器人系统,其特征在于,所述结构架(231)上还设有防护罩(234),所述防护罩(234)上方设有烟尘处理机构(236)。
6.根据权利要求5所述的地铁站连续墙钢筋网智能焊接机器人系统,其特征在于,所述焊接机(233)为二氧化碳气体保护焊机。
7.根据权利要求6所述的地铁站连续墙钢筋网智能焊接机器人系统,其特征在于,所述结构架(231)上还设有清枪站(237)。
8.根据权利要求7所述的地铁站连续墙钢筋网智能焊接机器人系统,其特征在于,所述清枪站(237)至少具备剪丝、防溅剂喷涂和内渣清理功能。
9.根据权利要求5所述的地铁站连续墙钢筋网智能焊接机器人系统,其特征在于,所述防护罩(234)上设有防弧光玻璃。
10.根据权利要求1-4任一项所述的地铁站连续墙钢筋网智能焊接机器人系统,其特征在于,还包括控制器(25),所述车架(21)一侧设有集线盘(24),其上缠绕有缆线,且缆线一端与控制器(25)电连接。
技术总结
地铁站连续墙钢筋网智能焊接机器人系统,包括地轨及其上设置的能够沿地轨移动的车架,车架上前后设有理料装置和焊接装置,理料装置包括垂直于车架移动方向设置的钢筋储放平台,钢筋储放平台后侧设有能够拨动钢筋逐根落下的顺料机构,焊接装置包括垂直于车架移动方向设置的结构架,其下方沿其长度方向设有若干个机械臂,焊接装置还包括与机械臂数量相同的若干焊接机,若干焊接机的机身部分设置在车架和/或结构架上,焊接头固定在机械臂的外端,车架的移动配合顺料机构的动作能够将纬向钢筋按预设的距离逐个拨下,配合焊接机完成焊接工作,降低了工人劳动成本,多个机械臂和焊接机配合进行焊接工作的方式,有效保证了钢筋网的焊接效率。
技术研发人员:王举坤,宋宏法,郝英敏,宋振奇,马从发,吴东周,马发运,冯平,刘晓峰
受保护的技术使用者:山东宋新楼机器人有限公司
技术研发日:20230706
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!