一种铝塑型材中梃自动加工设备的制作方法
本技术属于铝塑门窗加工设备领域,尤其涉及一种铝塑型材中梃自动加工设备。
背景技术:
1、铝塑型材中梃自动加工设备在加工铝塑型材前需要通过固定工装来将铝塑型材固定。如申请号为cn201020510737.5的申请文件公开的一种铝塑型材钻孔机,通过人工放置铝塑型材在加工平台上,再通过夹紧气缸将其夹紧,但是加工完成之后只能由工人将铝塑型材取下进行堆放,上述的通过人工取下铝塑型材的过程导致了工作效率较慢,不利于企业的规模化生产。
技术实现思路
1、本实用新型针对上述的问题提供了一种能将铝塑型材夹紧并运出加工平台的铝塑型材中梃自动加工设备。
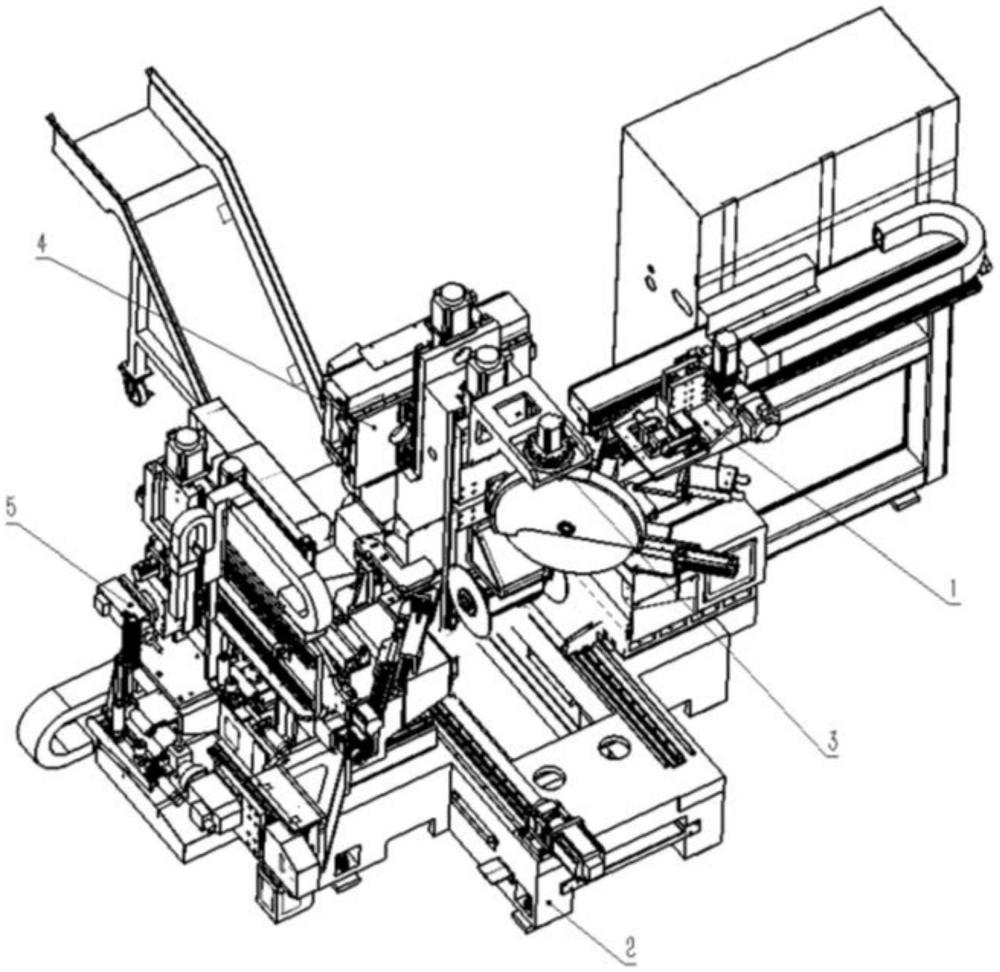
2、为了达到上述目的,本实用新型采用的技术方案为,一种铝塑型材中梃自动加工设备,包括安装在底座上的切割装置、铣削装置、中梃铣榫口装置,还包括用于将成品工件运出铝塑型材中梃自动加工设备的夹爪出料装置,所述夹爪出料装置包括出料机架,所述出料机架上连接有两条直线导轨,两条所述直线导轨通过滑块连接有出料滑板,所述出料滑板上安装有用于驱动出料滑板移动的水平伺服电机,所述出料滑板上还安装有z轴直线导轨机构,所述z轴直线导轨机构包括z轴伺服电机和受z轴伺服电机驱动的十字滑座,所述十字滑座上方安装有y轴伺服电机,所述y轴伺服电机通过皮带连接的方式连接有丝杆,所述丝杆螺纹连接有螺母座,所述螺母座的下端穿过十字滑座连接有后夹爪,所述十字滑座下方通过固定座连接有气缸,所述气缸上连接有用于与后夹爪夹紧铝塑型材的前夹爪。
3、作为优选,所述z轴伺服电机包括输出端,所述输出端穿过出料滑板连接有齿轮,所述齿轮啮合有齿条,所述齿条固定在出料机架上。
4、作为优选,所述前夹爪的截面呈l字形。
5、作为优选,所述十字滑座上方固定有用于支撑丝杆的支撑座。
6、作为优选,所述十字滑座下方固定有滑轨,所述滑轨上滑动连接有滑块,所述滑块与后夹爪固定连接。
7、与现有技术相比,本实用新型的优点和积极效果在于,
8、本实用新型中的夹爪出料装置通过前夹爪与后夹爪将工件(铝塑型材)夹紧,再由水平伺服电机驱动出料滑板移动,从而将工件运出铝塑型材中梃自动加工设备。z轴直线导轨机构还可带动前夹爪与后夹爪在竖直方向上移动,从而实现调节高度,还设置有y轴伺服电机带动后夹爪沿y轴移动,综上可实现后夹爪在z轴、y轴上的调节。本实用新型yz轴联动,实现后夹爪准确定位,前夹爪夹紧工件,沿x轴运动移出工件,三轴联动方式可满足复杂截面工件的自动夹持及运送。
技术特征:
1.一种铝塑型材中梃自动加工设备,包括安装在底座上的切割装置、铣削装置、中梃铣榫口装置,其特征在于,还包括用于将成品工件运出铝塑型材中梃自动加工设备的夹爪出料装置,所述夹爪出料装置包括出料机架,所述出料机架上连接有两条直线导轨,两条所述直线导轨通过滑块连接有出料滑板,所述出料滑板上安装有用于驱动出料滑板移动的水平伺服电机,所述出料滑板上还安装有z轴直线导轨机构,所述z轴直线导轨机构包括z轴伺服电机和受z轴伺服电机驱动的十字滑座,所述十字滑座上方安装有y轴伺服电机,所述y轴伺服电机通过皮带连接的方式连接有丝杆,所述丝杆螺纹连接有螺母座,所述螺母座的下端穿过十字滑座连接有后夹爪,所述十字滑座下方通过固定座连接有气缸,所述气缸上连接有用于与后夹爪夹紧铝塑型材的前夹爪。
2.根据权利要求1所述的一种铝塑型材中梃自动加工设备,其特征在于,所述z轴伺服电机包括输出端,所述输出端穿过出料滑板连接有齿轮,所述齿轮啮合有齿条,所述齿条固定在出料机架上。
3.根据权利要求1所述的一种铝塑型材中梃自动加工设备,其特征在于,所述前夹爪的截面呈l字形。
4.根据权利要求1所述的一种铝塑型材中梃自动加工设备,其特征在于,所述十字滑座上方固定有用于支撑丝杆的支撑座。
5.根据权利要求1所述的一种铝塑型材中梃自动加工设备,其特征在于,所述十字滑座下方固定有滑轨,所述滑轨上滑动连接有滑块,所述滑块与后夹爪固定连接。
技术总结
本技术属于铝塑门窗加工设备领域,尤其涉及一种铝塑型材中梃自动加工设备,包括安装在底座上的切割装置、铣削装置、中梃铣榫口装置,还包括用于将成品工件运出铝塑型材中梃自动加工设备的夹爪出料装置,所述夹爪出料装置包括出料机架,所述出料机架上连接有两条直线导轨,两条所述直线导轨通过滑块连接有出料滑板,所述出料滑板上安装有用于驱动出料滑板移动的水平伺服电机。本技术中的夹爪出料装置通过前夹爪与后夹爪将工件(铝塑型材)夹紧,再由水平伺服电机驱动出料滑板移动,从而将工件运出铝塑型材中梃自动加工设备。
技术研发人员:张守宪,李志刚,薛晓乾,李祥肖
受保护的技术使用者:济南凯之岳机器有限公司
技术研发日:20230718
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!