一种用于卧式加工中心机床工作台的高精度搬运小车的制作方法
本申请涉及机床上料,特别是涉及一种用于卧式加工中心机床工作台的高精度搬运小车。
背景技术:
1、为自动化生产线提供夹具、毛坯、半成品、成品等存储的一般称为料库、线边库等名称,以下统称为线边库。
2、在机加工行业中,卧式加工中心加工的零件体积大,重量大(负载达2.8吨),上下料人工操作非常困难,利用卧加的双交换工作台,通过六轴机器人搬运线边库上工作台、夹具和工件为一体的待加工件至卧式加工中心;可极大减少人工参与度,同时配置多工位线边库库位,可实现24小时无人参与的自动加工。
3、现有技术中,六轴机器人10的左侧为线边库20,右侧为卧式加工中心30,参见图1,六轴机器人10需要向左伸出手爪从线边库20上抓取待加工件后向右伸出至卧式加工中心30,实现上料。但是,向左伸出抓取待加工件的手爪在抓取待加工件后,位于六轴机器人10的左侧,目前六轴机器人10通过转动180°的方式将其手爪转动至六轴机器人10的右侧,然后伸至卧式加工中心30,由于卧式加工中心加工的待加工件零件体积大,重量大(负载达2.8吨),一是六轴机器人10的手爪向左或向右伸出负载待加工件时,六轴机器人10的重心并不在其行走轴上,特别容易侧翻,存在较大的安全隐患;二是六轴机器人10的手爪负载待加工件转动过程中,六轴机器人10的重心位置左右变动,容易晃动引起侧翻,且转动过程中待加工件因转动离心力容易从手爪掉落,存在较大的安全隐患;三是目前能够负载这么大重量的六轴机器人10价格昂贵,造成建造成本较高,且六轴机器人10体积较大,而线边库20与卧式加工中心30之间的间距有限,存在一定的空间限制;四是六轴机器人10的手爪负载待加工件向左或向右伸出时,由于待加工件的重量大,六轴机器人10的多个关节受倾覆力矩疲劳受损严重,需要经常更换维修,造成生产成本居高不下。
技术实现思路
1、基于此,有必要针对现有技术中的上述相关问题,提供一种用于卧式加工中心机床工作台的高精度搬运小车,能够解决现有技术中的上述问题。
2、一种用于卧式加工中心机床工作台的高精度搬运小车,包括支撑横梁和上料小车,所述上料小车包括行走地轨和行走小车,所述行走地轨固定设置于地面,所述支撑横梁位于所述行走地轨的第一侧,所述行走地轨背离所述第一侧的一侧为第二侧,所述行走小车包括行走部、竖向支撑架、升降部、三级伸缩部和支撑滑动部,所述行走部与所述行走地轨行走配合,所述竖向支撑架设置于所述行走部上,所述升降部设置于所述竖向支撑架,且所述升降部可沿着所述竖向支撑架升降运动,所述三级伸缩部设置于所述升降部,且所述三级伸缩部可水平三级伸出,且可朝向所述第一侧和所述第二侧双向伸出,所述支撑滑动部设置于所述竖向支撑架朝向所述支撑横梁的一侧,且与所述支撑横梁滑动配合。
3、优选地,上述一种用于卧式加工中心机床工作台的高精度搬运小车中,所述三级伸缩部包括第一伸出部、第二伸出部、第三伸出部和驱动部,所述驱动部与所述第一伸出部驱动相连,所述第一伸出部与所述升降部滑动配合,所述第二伸出部与所述第一伸出部滑动配合,所述第一伸出部与所述第二伸出部驱动相连,所述第三伸出部与所述第二伸出部滑动配合,所述第二伸出部与所述第三伸出部驱动相连。
4、优选地,上述一种用于卧式加工中心机床工作台的高精度搬运小车中,所述第一伸出部包括设置于所述升降部的第一齿条、均设置于所述第一伸出部的第一齿轮和第二齿条,所述第二伸出部包括均设置于所述第二伸出部的第三齿条和第二齿轮,所述第一齿轮位于所述第一齿条与所述第三齿条之间,且均相啮合,所述第三伸出部包括设置于所述第三伸出部的第四齿条,所述第二齿轮位于所述第二齿条与所述第四齿条之间,且均相啮合。
5、优选地,上述一种用于卧式加工中心机床工作台的高精度搬运小车中,所述三级伸缩部具有初始位置、第一伸出位置和第二伸出位置,在所述初始位置,所述第一伸出部、所述第二伸出部、所述第三伸出部的对称轴重合,在所述第一伸出位置,所述第一伸出部、所述第二伸出部、所述第三伸出部均依次朝向所述第一侧伸出,所述第一伸出部、所述第二伸出部、所述第三伸出部均依次朝向所述第二侧伸出。
6、优选地,上述一种用于卧式加工中心机床工作台的高精度搬运小车中,所述第一伸出部与所述升降部、所述第二伸出部与所述第一伸出部、所述第三伸出部与所述第二伸出部之间均通过防倾覆滑轨滑块实现滑动配合。
7、优选地,上述一种用于卧式加工中心机床工作台的高精度搬运小车中,所述升降部包括驱动电机、导轨、丝杆、配合部和升降基板,所述驱动电机和所述导轨均设置于所述竖向支撑架,且所述驱动电机与所述丝杆驱动相连,所述配合部与所述丝杆螺纹配合,所述升降基板设置于所述配合部,所述三级伸缩部设置于所述升降基板。
8、优选地,上述一种用于卧式加工中心机床工作台的高精度搬运小车中,所述行走部具承重行走滚轮和限位导向滚轮,所述承重行走滚轮支撑于所述行走地轨上表面,且行走配合,所述行走地轨的两侧均设置有所述限位导向滚轮,且相夹紧贴合,所述限位导向滚轮与所述行走地轨在垂直于所述行走地轨的方向上导向限位配合。
9、本申请采用的技术方案能够达到以下有益效果:
10、本申请实施例公开的一种用于卧式加工中心机床工作台的高精度搬运小车中,通过上料小车代替现有技术中的六轴机器人,并通过支撑横梁对上料小车导向支撑,一是三级伸缩部向左或向右伸出负载待加工件时,即使重心不在行走地轨上,但是在支撑横梁与支撑滑动部的作用下,保证了高达4米的行走小车垂直而不倾斜侧翻;二是通过三级伸缩部的双向伸出即可实现待加工件在上料小车两侧的移动,三级伸缩部负载待加工件后无需转动,待加工件随着三级伸缩部在一个方向上平稳移动,避免待加工件转动过程中待加工件因转动离心力容易从手爪掉落,且在三级伸缩部双向伸出实现待加工件在上料小车两侧移动的同时,即使上料小车重心位置左右变动,但在支撑横梁与支撑滑动部的作用下,能够防止上料小车晃动引起侧翻;三是通过上料小车代替现有技术中的六轴机器人,而上料小车价格便宜,相较于六轴机器人建造成本能够大幅度降低,且由于三级伸缩部的初始长度较小,使得行走小车的宽度能够较小设置,能够使得行走小车适应线边库与卧加机床之间的间距有限的情况,使得行走小车对空间要求较小,进而使得行走小车不受空间限制,适应目前老旧厂区改造空间较小的限制;四是通过上料小车代替现有技术中的六轴机器人,相较于六轴机器人的维修费用,行走小车的维修费用较低,从而降低生产成本。
技术特征:
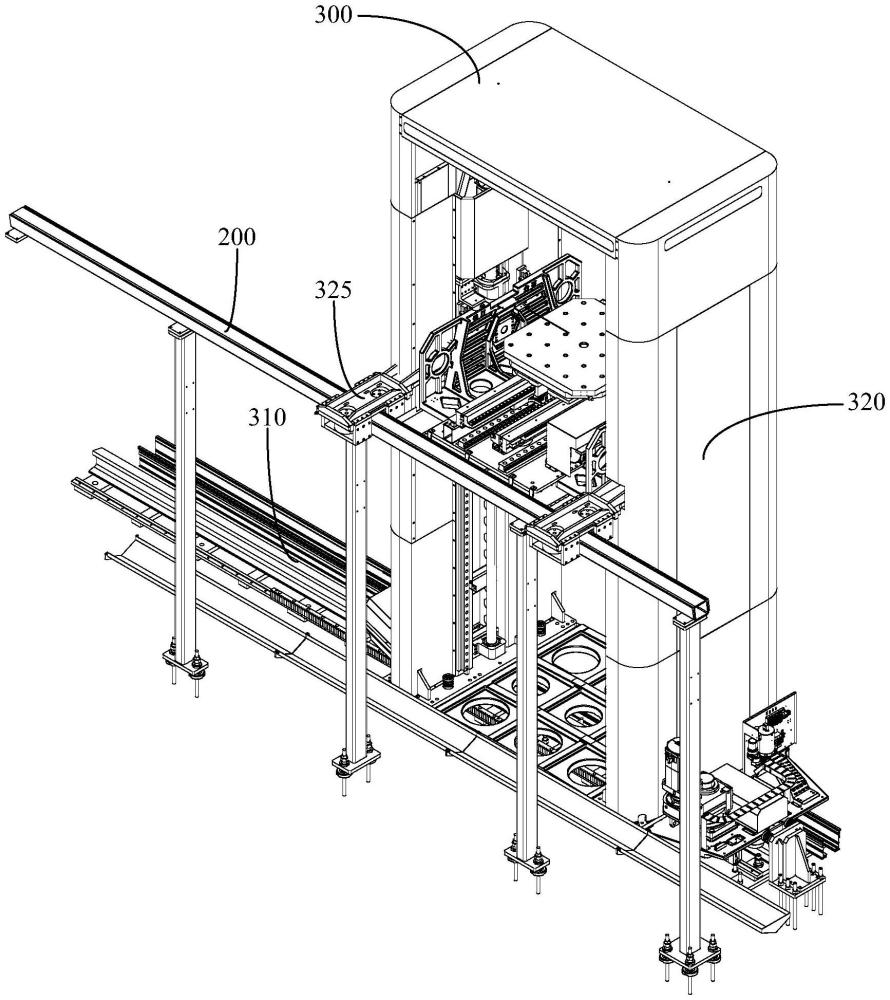
1.一种用于卧式加工中心机床工作台的高精度搬运小车,其特征在于,包括支撑横梁(200)和上料小车(300),所述上料小车(300)包括行走地轨(310)和行走小车(320),所述行走地轨(310)固定设置于地面,所述支撑横梁(200)位于所述行走地轨(310)的第一侧,所述行走地轨(310)背离所述第一侧的一侧为第二侧,所述行走小车(320)包括行走部(321)、竖向支撑架(322)、升降部(323)、三级伸缩部(324)和支撑滑动部(325),所述行走部(321)与所述行走地轨(310)行走配合,所述竖向支撑架(322)设置于所述行走部(321)上,所述升降部(323)设置于所述竖向支撑架(322),且所述升降部(323)可沿着所述竖向支撑架(322)升降运动,所述三级伸缩部(324)设置于所述升降部(323),且所述三级伸缩部(324)可水平三级伸出,且可朝向所述第一侧和所述第二侧双向伸出,所述支撑滑动部(325)设置于所述竖向支撑架(322)朝向所述支撑横梁(200)的一侧,且与所述支撑横梁(200)滑动配合。
2.根据权利要求1所述的一种用于卧式加工中心机床工作台的高精度搬运小车,其特征在于,所述三级伸缩部(324)包括第一伸出部(3241)、第二伸出部(3242)、第三伸出部(3243)和驱动部(3244),所述驱动部(3244)与所述第一伸出部(3241)驱动相连,所述第一伸出部(3241)与所述升降部(323)滑动配合,所述第二伸出部(3242)与所述第一伸出部(3241)滑动配合,所述第一伸出部(3241)与所述第二伸出部(3242)驱动相连,所述第三伸出部(3243)与所述第二伸出部(3242)滑动配合,所述第二伸出部(3242)与所述第三伸出部(3243)驱动相连。
3.根据权利要求2所述的一种用于卧式加工中心机床工作台的高精度搬运小车,其特征在于,所述第一伸出部(3241)包括设置于所述升降部(323)的第一齿条(32411)、均设置于所述第一伸出部(3241)的第一齿轮(32412)和第二齿条(32413),所述第二伸出部(3242)包括均设置于所述第二伸出部(3242)的第三齿条(32421)和第二齿轮(32422),所述第一齿轮(32412)位于所述第一齿条(32411)与所述第三齿条(32421)之间,且均相啮合,所述第三伸出部(3243)包括设置于所述第三伸出部(3243)的第四齿条(32431),所述第二齿轮(32422)位于所述第二齿条(32413)与所述第四齿条(32431)之间,且均相啮合。
4.根据权利要求2所述的一种用于卧式加工中心机床工作台的高精度搬运小车,其特征在于,所述三级伸缩部(324)具有初始位置、第一伸出位置和第二伸出位置,在所述初始位置,所述第一伸出部(3241)、所述第二伸出部(3242)、所述第三伸出部(3243)的对称轴重合,在所述第一伸出位置,所述第一伸出部(3241)、所述第二伸出部(3242)、所述第三伸出部(3243)均依次朝向所述第一侧伸出,在所述第二伸出位置,所述第一伸出部(3241)、所述第二伸出部(3242)、所述第三伸出部(3243)均依次朝向所述第二侧伸出。
5.根据权利要求2所述的一种用于卧式加工中心机床工作台的高精度搬运小车,其特征在于,所述第一伸出部(3241)与所述升降部(323)、所述第二伸出部(3242)与所述第一伸出部(3241)、所述第三伸出部(3243)与所述第二伸出部(3242)之间均通过防倾覆滑轨滑块实现滑动配合。
6.根据权利要求1所述的一种用于卧式加工中心机床工作台的高精度搬运小车,其特征在于,所述升降部(323)包括驱动电机(3231)、导轨(3232)、丝杆(3233)、配合部(3234)和升降基板(3235),所述驱动电机(3231)和所述导轨(3232)均设置于所述竖向支撑架(322),且所述驱动电机(3231)与所述丝杆(3233)驱动相连,所述配合部(3234)与所述丝杆(3233)螺纹配合,所述升降基板(3235)设置于所述配合部(3234),所述三级伸缩部(324)设置于所述升降基板(3235)。
7.根据权利要求1所述的一种用于卧式加工中心机床工作台的高精度搬运小车,其特征在于,所述行走部(321)具承重行走滚轮和限位导向滚轮,所述承重行走滚轮支撑于所述行走地轨(310)上表面,且行走配合,所述行走地轨(310)的两侧均设置有所述限位导向滚轮,且相夹紧贴合,所述限位导向滚轮与所述行走地轨(310)在垂直于所述行走地轨(310)的方向上导向限位配合。
技术总结
本申请涉及一种用于卧式加工中心机床工作台的高精度搬运小车,行走地轨固定设置于地面,支撑横梁位于行走地轨的第一侧,行走部与行走地轨行走配合,竖向支撑架设置于行走部上,升降部设置于竖向支撑架,升降部可沿着竖向支撑架升降运动,三级伸缩部设置于升降部,且三级伸缩部可水平三级伸出,可朝向第一侧和第二侧双向伸出,支撑滑动部与支撑横梁滑动配合。通过上料小车代替现有技术中的六轴机器人,并通过支撑横梁对上料小车导向支撑,在支撑横梁与支撑滑动部的作用下,保证行走小车垂直而不倾斜侧翻,且行走小车的建造及维修成本较低,同时由于三级伸缩部的初始长度较小,使得行走小车的宽度能够较小设置,使得行走小车对空间要求较小。
技术研发人员:马建勇,王世明,杨振宁,严鹏山,王文杰,马龙龙,王雄
受保护的技术使用者:一工机器人银川有限公司
技术研发日:20230724
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!