一种能够自主上下料的平板坡口切割机器人的制作方法
本技术涉及机器人智能制造,尤其涉及一种能够自主上下料的平板坡口切割机器人。
背景技术:
1、目前,传统设备在切割工序,需要人工上料夹持紧凑后再进行切割,而在下料时又要人工将产品取出,效率低且存在一定的危险性,随着数控切割机的普及和中国制造产业技术升级的需要,采用工业机器人进行钢板零件坡口切割日渐广泛,能够自主上下料切割机器人便应运而生,自动生产线在无人干预的情况下可以按规定的程序或指令自动进行操作或控制的过程,在大批、大量生产中采用机加工自动化生产线能提高劳动生产率,稳定和提高产品质量,改善劳动条件,缩减生产占地面积,降低生产成本,缩短生产周期,保证生产均衡性,有显著的经济效益。
2、但是在切割机器人执行切割产品过程中,产品会产生大量粉尘碎屑,容易损坏生产线上的设备,影响到后续生产,以及设备的使用寿命,造成不必要的经济损失,为此提出一种能够自主上下料的平板坡口切割机器人来解决上述问题。
技术实现思路
1、为了弥补以上不足,本实用新型提供了一种能够自主上下料的平板坡口切割机器人,旨在改善了切割机器人在产品切割过程中,容易被粉尘损伤生产设备的问题。
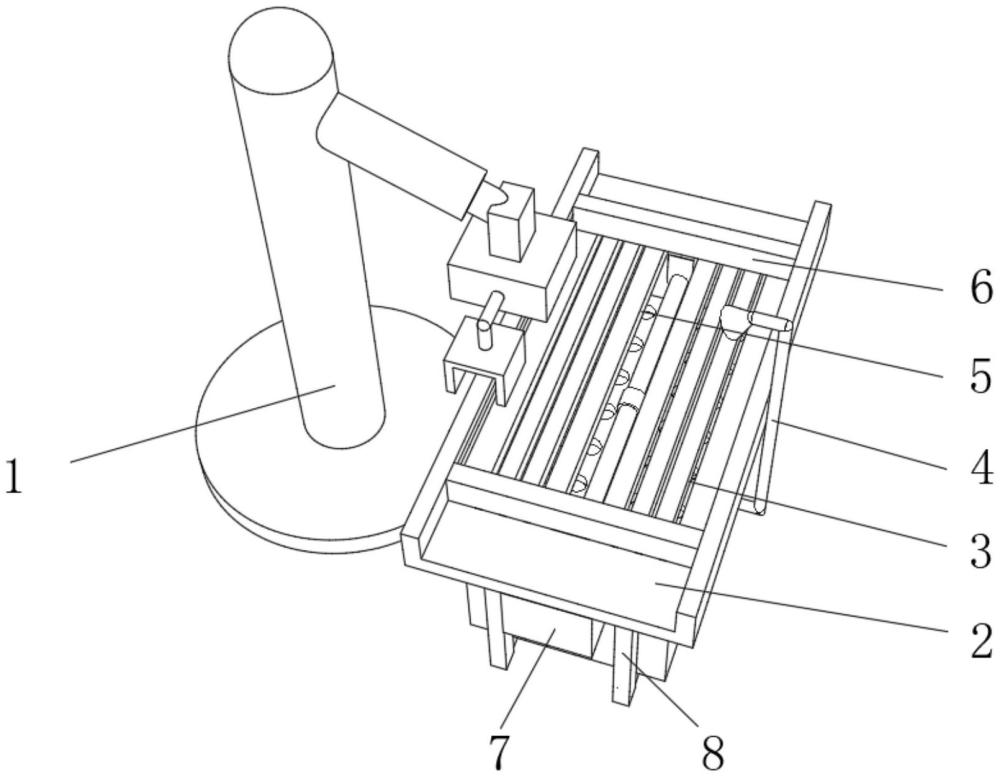
2、为了实现上述目的,本实用新型采用了如下技术方案:一种能够自主上下料的平板坡口切割机器人,包括切割平台,所述切割平台的左方放置有本体,所述切割平台的底部固定连接有蓄水箱,所述蓄水箱的中部滑动连接有过滤板,所述切割平台的左侧转动连接有锁栓,所述锁栓与过滤板相接触,所述切割平台的左侧固定连接有挂钩,所述蓄水箱的内壁底部固定连接有水泵,所述水泵的输出端固定连接有喷管,所述切割平台的中部设置有引流槽。
3、作为上述技术方案的进一步描述:
4、所述切割平台的前侧固定连接有外壳,所述外壳的内壁前侧固定连接有电机,所述电机的输出端固定连接有双向螺纹杆,所述双向螺纹杆的外周螺纹连接有螺纹块,所述螺纹块的顶部固定连接有夹板。
5、作为上述技术方案的进一步描述:
6、所述切割平台的左侧设置有移动槽,所述过滤板滑动连接在过滤板的中部。
7、作为上述技术方案的进一步描述:
8、所述切割平台的底部固定连接有支撑框架,所述蓄水箱固定连接在支撑框架的中部。
9、作为上述技术方案的进一步描述:
10、所述切割平台的中部设置有滑槽,所述螺纹块滑动连接在滑槽的中部。
11、作为上述技术方案的进一步描述:
12、所述切割平台的内壁左右两侧均设置有限位槽,所述夹板的左右两侧均固定连接有限位块,所述限位块滑动连接在限位槽中部。
13、作为上述技术方案的进一步描述:
14、所述切割平台的内部右侧设置有凹槽,所述凹槽的中部连接有弹簧杆,所述弹簧杆与过滤板相接触。
15、本实用新型具有如下有益效果:
16、1、本实用新型中,通过水泵、锁栓、过滤板、切割平台等结构的配合下,使得过滤粉尘后的过滤板便于取出,从而实现便于对粉尘进行收集清理,提升设备的使用寿命,减少粉尘对生产设备的损伤。
17、2、本实用新型中,通过外壳、夹板、电机、双向螺纹杆等结构的配合下,使得夹板可以对本体放置在切割平台上的物料进行固定,从而实现夹板便于对物料进行夹持,避免物料在切割过程中因抖动导致切割错位损伤物料,造成浪费。
技术特征:
1.一种能够自主上下料的平板坡口切割机器人,包括切割平台(2),其特征在于:所述切割平台(2)的左方放置有本体(1),所述切割平台(2)的底部固定连接有蓄水箱(20),所述蓄水箱(20)的中部滑动连接有过滤板(11),所述切割平台(2)的左侧转动连接有锁栓(15),所述锁栓(15)与过滤板(11)相接触,所述切割平台(2)的左侧固定连接有挂钩(17),所述蓄水箱(20)的内壁底部固定连接有水泵(10),所述水泵(10)的输出端固定连接有喷管(4),所述切割平台(2)的中部设置有引流槽(3)。
2.根据权利要求1所述的一种能够自主上下料的平板坡口切割机器人,其特征在于:所述切割平台(2)的前侧固定连接有外壳(7),所述外壳(7)的内壁前侧固定连接有电机(14),所述电机(14)的输出端固定连接有双向螺纹杆(9),所述双向螺纹杆(9)的外周螺纹连接有螺纹块(13),所述螺纹块(13)的顶部固定连接有夹板(6)。
3.根据权利要求1所述的一种能够自主上下料的平板坡口切割机器人,其特征在于:所述切割平台(2)的左侧设置有移动槽(16),所述过滤板(11)滑动连接在过滤板(11)的中部。
4.根据权利要求1所述的一种能够自主上下料的平板坡口切割机器人,其特征在于:所述切割平台(2)的底部固定连接有支撑框架(8),所述蓄水箱(20)固定连接在支撑框架(8)的中部。
5.根据权利要求2所述的一种能够自主上下料的平板坡口切割机器人,其特征在于:所述切割平台(2)的中部设置有滑槽(5),所述螺纹块(13)滑动连接在滑槽(5)的中部。
6.根据权利要求2所述的一种能够自主上下料的平板坡口切割机器人,其特征在于:所述切割平台(2)的内壁左右两侧均设置有限位槽(12),所述夹板(6)的左右两侧均固定连接有限位块,所述限位块滑动连接在限位槽(12)中部。
7.根据权利要求1所述的一种能够自主上下料的平板坡口切割机器人,其特征在于:所述切割平台(2)的内部右侧设置有凹槽(19),所述凹槽(19)的中部连接有弹簧杆(18),所述弹簧杆(18)与过滤板(11)相接触。
技术总结
本技术涉及机器人智能制造技术领域,公开了一种能够自主上下料的平板坡口切割机器人,包括切割平台,所述切割平台的左方放置有本体,所述切割平台的底部固定连接有蓄水箱,所述蓄水箱的中部滑动连接有过滤板,所述切割平台的左侧转动连接有锁栓,所述锁栓与过滤板相接触,所述切割平台的左侧固定连接有挂钩,所述蓄水箱的内壁底部固定连接有水泵,所述水泵的输出端固定连接有喷管,所述切割平台的中部设置有引流槽。本技术中,通过水泵、锁栓、过滤板、切割平台等结构的配合下,使得过滤粉尘后的过滤板便于取出,从而实现便于对粉尘进行收集清理,提升设备的使用寿命,减少粉尘对生产设备的损伤。
技术研发人员:杨雷,肖月朗
受保护的技术使用者:南京种子智能科技有限公司
技术研发日:20230830
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!