一种数控自动化机床用夹持机构
本发明涉及机床配套设备,特别是一种数控自动化机床用夹持机构。
背景技术:
1、数控机床是数字控制机床(computer numerical control machinetools)的简称,是一种安装有程序控制系统的自动化机床。数控机床较好地解决了复杂、精密、小批量、多品种的零件加工问题,是一种柔性的、高效能的自动化机床,代表了现代机床控制技术的发展方向。
2、数控机床使用的夹持机构主要作用是对需要加工的工件进行固定、利于后续刀具对工件进行切削等加工。现有的数控车床夹持机构一般通过卡盘方式等夹紧工件,该种方式对于两侧端具有外径不大轴杆的工件能达到较好的固定效果,但是当用于两侧端没有轴杆固定工位且外径较大的工件固定时,由于卡盘的卡爪固定工件的外径有限,因此,卡盘方式无法起到有效固定作用。还有就是,对于两侧端没有轴杆的工件固定时,现有的数控机床夹持机构无法自动实现同心度检测,当工件固定在固定工位上下偏心时,特别用于刀具对工件后续旋转不同端面加工时,在人为调节后工件不同心时,有可能造成刀具加工面和工件接触面过大,导致机床的刀具负荷过大甚至刀具的损坏。综上,提供一种能对任何外形工件进行方便夹持,且利于工件旋转加工,并能自动调节工件同心度的夹持机构显得尤为必要。
技术实现思路
1、为了克服现有数控机床使用的夹持机构因结构所限存在如背景所述弊端,本发明提供了协同数控机床使用,应用中能方便对任何形状工件两侧端进行夹持固定,且工作人员能一键式操作、自动调节工件的同心度,为后续机床刀具精确、稳定旋转加工工件起到了有利技术支持的一种数控自动化机床用夹持机构。
2、本发明解决其技术问题所采用的技术方案是:
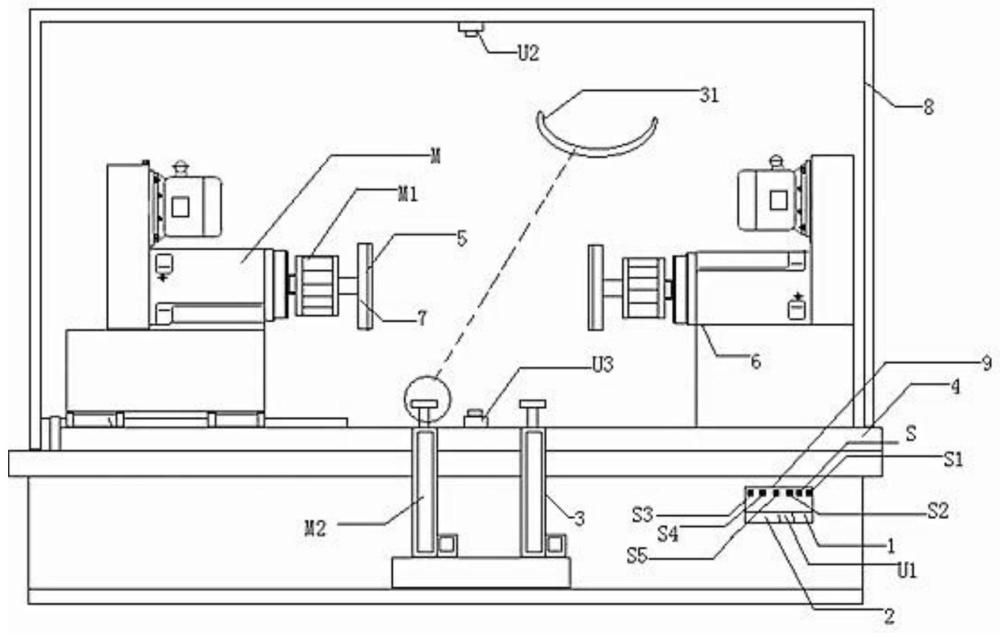
3、一种数控自动化机床用夹持机构,包括电机减速机构、电动推杆、激光测距仪、电源模块、电源开关,其特征在于,还具有控制电路、报警电路、顶升机构;所述电动伸缩杆和电机减速机构各有两套,两套电动推杆的筒体分别安装在机床上端两侧,两套电机减速机构的壳体分别安装在两套电动推杆的活动柱内侧端;所述两套电机减速机构的动力输出轴内侧端各安装有挡板;所述机床的机架上端安装有支撑架,激光测距仪有两套,两套激光测距仪分别安装在机床上端及支撑架上端下部,顶升机构有两套,顶升机构安装在机床内;所述电源模块、电源开关、控制电路、报警电路安装在元件盒内;所述电源开关的其中一只电源输出端和控制电路的控制电源输入端电性连接,控制电路的电源输出端和顶升机构的电源输入两端分别电性连接;所述两套激光测距仪的信号输出端和控制电路的两路信号输入端分别电性连接,控制电路的触发电源输出端和报警电路的电源输入端电性连接。
4、进一步地,所述两套激光测距仪的探测头处于面对面分布状态,两套电机减速机构的动力输出轴位于内侧且处于面对面状态。
5、进一步地,所述电机减速机构是同轴电机齿轮减速器。
6、进一步地,所述控制电路包括电性连接的可调电阻、运放、电源开关、npn三极管、蜂鸣器、继电器,两只可调电阻一端和第一只电阻一端及第二只电阻一端、第三只电阻一端及第四只电阻一端分别连接,第一只电阻另一端和第三只电阻另一端、运放负极电源输入端、npn三极管发射极连接,第二只电阻另一端、第四只电阻另一端和运放的正向输入端及反向输入端分别连接,运放输出端和电源开关一端连接,电源开关另一端和第五只电阻一端连接,第五只电阻另一端和npn三极管基极连接,npn三极管集电极和继电器负极电源输入端连接,运放正极电源输入端和继电器正极电源输入端连接,继电器两个常开触点端和蜂鸣器电源输入两端分别连接。
7、进一步地,所述报警电路包括电性连接的电阻、pnp三极管和蜂鸣器、电源开关,电阻一端和pnp三极管基极连接,pnp三极管集电极和蜂鸣器正极电源输入端连接,电源开关一端和电阻另一端连接。
8、进一步地,所述顶升机构包括电动伸缩杆和支撑杆,电动伸缩杆和支撑杆各有两套,两套支撑杆上端是弧形结构,两只支撑杆下端分别安装在两套电动伸缩杆的活动柱上端,两套电动伸缩杆的筒体下端分别安装在机床内。
9、进一步地,所述挡板的内侧端分布有若干防滑齿。
10、进一步地,所述两个挡板分别处于两套激光测距仪之间的间距中心部位。
11、本发明有益效果是:本发明使用前,把需要加工的工件放在顶升机构的两只支撑杆上端,然后经电源开关控制两套电动伸缩杆的活动柱上行,同时两套激光测距仪及控制电路能自动探测工件是否处于同心,当工件处于同心后,电动伸缩杆的活动柱不再上行,继之,工作人员就可控制两套电动推杆夹紧工件两侧,后续机床就可对工件进行加工;实际加工中,当因各种原因设备夹持工件两侧端不稳时,报警电路能及时提示工作人员重新进行固定,保证了工件加工的顺利进行。本发明能方便对任何形状工件两侧端进行夹持固定,且工作人员能一键式操作自动调节工件的同心度,为后续机床刀具精确、稳定旋转加工工件起到了有利技术支持。基于上述,本发明具有好的应用前景。
技术特征:
1.一种数控自动化机床用夹持机构,包括电机减速机构、电动推杆、激光测距仪、电源模块、电源开关,其特征在于,还具有控制电路、报警电路、顶升机构;所述电动伸缩杆和电机减速机构各有两套,两套电动推杆的筒体分别安装在机床上端两侧,两套电机减速机构的壳体分别安装在两套电动推杆的活动柱内侧端;所述两套电机减速机构的动力输出轴内侧端各安装有挡板;所述机床的机架上端安装有支撑架,激光测距仪有两套,两套激光测距仪分别安装在机床上端及支撑架上端下部,顶升机构有两套,顶升机构安装在机床内;所述电源模块、电源开关、控制电路、报警电路安装在元件盒内;所述电源开关的其中一只电源输出端和控制电路的控制电源输入端电性连接,控制电路的电源输出端和顶升机构的电源输入两端分别电性连接;所述两套激光测距仪的信号输出端和控制电路的两路信号输入端分别电性连接,控制电路的触发电源输出端和报警电路的电源输入端电性连接。
2.根据权利要求1所述的一种数控自动化机床用夹持机构,其特征在于,两套激光测距仪的探测头处于面对面分布状态,两套电机减速机构的动力输出轴位于内侧且处于面对面状态。
3.根据权利要求1所述的一种数控自动化机床用夹持机构,其特征在于,电机减速机构是同轴电机齿轮减速器。
4.根据权利要求1所述的一种数控自动化机床用夹持机构,其特征在于,控制电路包括电性连接的可调电阻、运放、电源开关、npn三极管、蜂鸣器、继电器,两只可调电阻一端和第一只电阻一端及第二只电阻一端、第三只电阻一端及第四只电阻一端分别连接,第一只电阻另一端和第三只电阻另一端、运放负极电源输入端、npn三极管发射极连接,第二只电阻另一端、第四只电阻另一端和运放的正向输入端及反向输入端分别连接,运放输出端和电源开关一端连接,电源开关另一端和第五只电阻一端连接,第五只电阻另一端和npn三极管基极连接,npn三极管集电极和继电器负极电源输入端连接,运放正极电源输入端和继电器正极电源输入端连接,继电器两个常开触点端和蜂鸣器电源输入两端分别连接。
5.根据权利要求1所述的一种数控自动化机床用夹持机构,其特征在于,报警电路包括电性连接的电阻、pnp三极管和蜂鸣器、电源开关,电阻一端和pnp三极管基极连接,pnp三极管集电极和蜂鸣器正极电源输入端连接,电源开关一端和电阻另一端连接。
6.根据权利要求1所述的一种数控自动化机床用夹持机构,其特征在于,顶升机构包括电动伸缩杆和支撑杆,电动伸缩杆和支撑杆各有两套,两套支撑杆上端是弧形结构,两只支撑杆下端分别安装在两套电动伸缩杆的活动柱上端,两套电动伸缩杆的筒体下端分别安装在机床内。
7.根据权利要求1所述的一种数控自动化机床用夹持机构,其特征在于,挡板的内侧端分布有若干防滑齿。
8.根据权利要求1所述的一种数控自动化机床用夹持机构,其特征在于,两个挡板分别处于两套激光测距仪之间的间距中心部位。
技术总结
一种数控自动化机床用夹持机构,包括电机减速机构、电动推杆、激光测距仪、电源模块、电源开关,还具有控制电路、报警电路、顶升机构;两套电动推杆的筒体分别安装在机床上端两侧,两套电机减速机构的壳体分别安装在两套电动推杆的活动柱内侧端,两套激光测距仪分别安装在机床上端及支撑架上端下部,顶升机构安装在机床内;电源模块、电源开关、控制电路、报警电路安装在元件盒内并电性连接。本发明能方便对任何形状工件两侧端进行夹持固定,且工作人员能一键式操作自动调节工件的同心度,当因各种原因设备夹持工件两侧端不稳时,报警电路能及时提示工作人员重新进行固定,为后续机床刀具精确、稳定旋转加工工件起到了有利技术支持。
技术研发人员:冯浩洋,周红海,张家翔,洪建明
受保护的技术使用者:深圳职业技术大学
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!