一种高效焊接机器人
本发明涉及焊接,具体为一种高效焊接机器人。
背景技术:
1、焊接是一种广泛应用的工艺技术,尤其在制造业中占据重要地位。为了提高焊接效率和焊接质量,焊接机器人技术不断发展,其中,焊丝的供给和连接技术是焊接机器人中的关键技术之一,传统的焊接机器人通常需要定期更换焊丝,这不仅影响了焊接效率,而且增加了工人的工作负担。
2、现有的焊接机器人中,在焊丝使用过程中,当一根焊丝使用完时,需要停机更换焊丝,这大大影响了焊接效率。
技术实现思路
1、本发明的目的在于提供一种可自动更换焊丝高效焊接机器人,解决了现有的焊接机器人中,在焊丝使用过程中,当一根焊丝使用完时,需要停机更换焊丝,影响了焊接效率的问题。
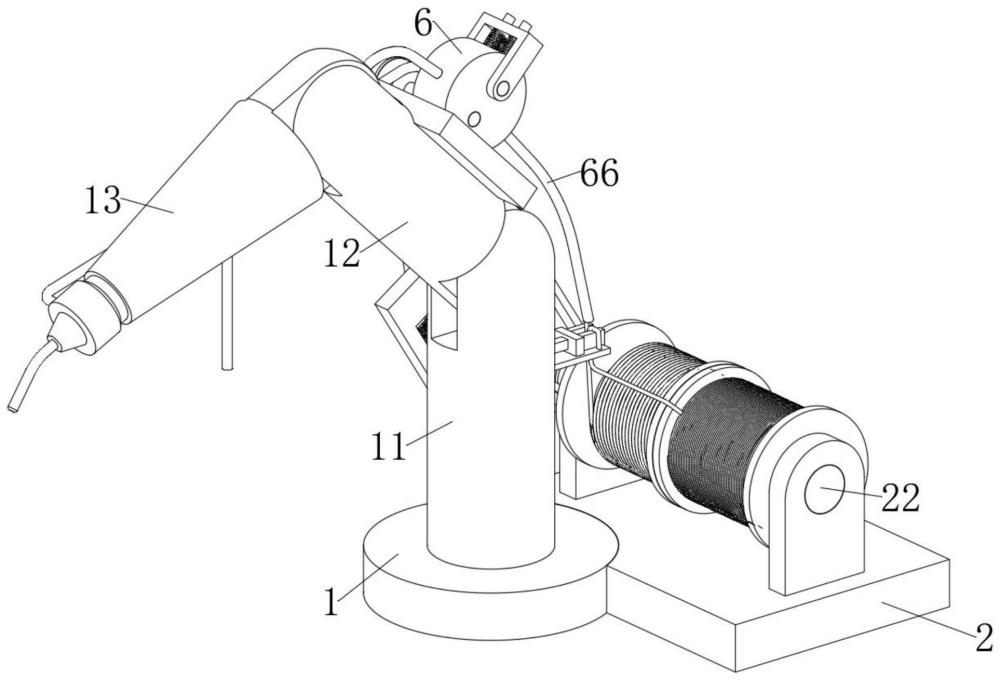
2、为实现上述目的,本发明提供如下技术方案:一种高效焊接机器人包括转动座、连接于所述转动座上的第一机械臂、连接于所述第一机械臂的第二机械臂以及连接于所述第二机械臂的第三机械臂,所述第二机械臂上设置有送丝机构,所述转动座上固定连接有第一安装板,所述第一安装板上转动连接有安装轴,所述安装轴上安装有多个焊丝收纳轮,所述焊丝收纳盘上的焊丝连接于所述送丝机构,所述第一机械臂上固定连接有第二安装板和焊接钳,所述焊接钳贴合于所述第二安装板的上表面,所述第二安装板上开设有与焊丝配合的孔,多个所述焊丝收纳轮的其中两个得到焊丝穿过所述第二安装板上的孔,其中一个所述焊丝收纳轮上的焊丝穿过所述焊接钳的焊接部位并由所述送丝机构输送使用,另一个所述焊丝收纳盘上的焊丝的端部处于所述焊接钳的焊接部位,其中一个所述焊丝收纳轮上的焊丝抽取完毕且底端移动至所述焊接钳的焊接位置后,所述焊接钳运行并将两个所述焊丝收纳轮上的焊丝焊接。
3、优选的,所述第二安装板的上表面固定连接有套管,未被使用的所述焊丝收纳轮上的焊丝端部插接于所述套管内并被所述套管弹性包覆,所述焊接钳合并时可将所述套管内的焊丝拉出所述套管。
4、优选的,所述安装轴由所述送丝机构驱动旋转,所述安装轴上设置有与多个所述焊丝收纳轮配合的电动卡块,所述电动卡块径向滑动时抵接于相应的所述焊丝收纳轮的内壁,使得相应的所述焊丝收纳轮与所述安装轴同步转动。
5、优选的,所述送丝机构包括安装筒,所述安装筒内转动连接有第一送丝轮和第二送丝轮,所述焊丝穿过所述第一送丝轮和所述第二送丝轮之间,所述安装筒上固定连接有送丝管,所述焊丝穿过所述送丝管内。
6、优选的,所述第一送丝轮上同轴固定连接有主动轮,所述安装轴的端部开设有环形槽,所述主动轮与所述环形槽之间传动连接有皮带。
7、优选的,所述安装轴上位于所述环形槽处径向滑动连接有多个环形阵列设置的扩张块,所述扩张块径向外移时,所述主动轮转动的线速度高于所述安装轴,所述扩张块径向内移时,所述主动轮的转动速度低于所述安装轴。
8、优选的,所述第二安装板的上表面固定连接有活塞筒,所述活塞筒内滑动连接有活塞杆,所述活塞杆与所述焊接钳固定连接,所述第一安装板上固定连接有安装块,所述安装块内开设有滑孔,所述滑孔内滑动连接有滑杆,所述活塞筒与所述滑孔之间连通有第一管道,所述活塞筒上连通有第二管道,所述滑孔上连通有第三管道,所述第一管道和所述第二管道上均设置有单向阀,所述第三管道上设置有电磁阀,所述滑杆的端部固定连接有楔块,所述楔块插接于所述安装轴内,且所述楔块与多个所述扩张块磁性相吸,所述楔块向所述安装轴内滑动时可推动多个所述扩张块外扩;
9、所述焊接钳闭合时,所述活塞杆受牵拉以使得所述滑孔内的介质抽取至所述活塞筒内,从而所述楔块远离所述安装轴以使得多个所述扩张块收缩。
10、优选的,所述第一机械臂的侧壁固定连接有矩形板,所述矩形板上滑动连接有矩形块,所述矩形块的两侧均固定连接有弹簧,两个所述弹簧均与所述矩形板固定连接,所述矩形块上转动连接有扩张轮,所述扩张轮与所述皮带传动连接。
11、优选的,所述安装筒上固定连接有两个导杆,所述导杆上滑动连接有n形架,所述导杆上套接有拉簧,所述拉簧的两端分别与所述n形架和所述安装筒固定连接,所述第二送丝轮的轴穿过所述安装筒并转动连接于所述n形架,所述安装筒上开设有与所述第二送丝轮的轴配合的长圆孔,所述n形架上设置有用于检测所述导杆位置的位移传感器,所述位移传感器检测到所述n形架与所述导杆相对移动时,所述第三管道上的电磁阀开启以使得所述滑孔内的负压释放;
12、所述滑杆与所述滑孔的孔壁磁性相斥,所述滑孔内的负压释放后,所述滑杆向所述滑孔外部的方向滑动。
13、优选的,所述安装筒与所述第三机械臂之间连接有三通管,所述三通管远离所述安装筒和所述第三机械臂而当一端连通外部保护气源,所述三通管上设置有电磁三通阀,所述电磁三通阀可切换所述外部保护气源传输至所述安装筒内或传输至所述第三机械臂上的焊头内。
14、与现有技术相比,本发明的有益效果如下:
15、1、本发明其中的一个焊丝收纳轮上的焊丝由送丝机构输送至第三机械臂上的焊头进行焊接使用,另一个焊丝收纳轮上的焊丝穿过第二安装板上的孔且端部处于焊接钳的中部,当处于使用状态的焊丝收纳轮上的焊丝被使用完时,送丝机构继续抽取焊丝,当次焊丝被输送至其底端也处于焊接钳的中部时,送丝机构停止且焊接钳启动,将两根焊丝焊接连接在一起,而第二安装板上的孔则对两根焊丝进行定位,使得两根焊丝能够相互接触,从而焊接钳运行时能够将两根焊丝焊接在一起,当两个焊丝焊接在一起后送丝机构再次启动,使得另一个焊丝收纳轮上的焊丝被收取使用,从而无需停机较长时间进行更换焊丝,提升了焊接机器人的焊接效率。
技术特征:
1.一种高效焊接机器人,包括转动座(1)、连接于所述转动座(1)上的第一机械臂(11)、连接于所述第一机械臂(11)的第二机械臂(12)以及连接于所述第二机械臂(12)的第三机械臂(13),其特征在于:所述第二机械臂(12)上设置有送丝机构,所述转动座(1)上固定连接有第一安装板(2),所述第一安装板(2)上转动连接有安装轴(22),所述安装轴(22)上安装有多个焊丝收纳轮,所述焊丝收纳盘上的焊丝连接于所述送丝机构,所述第一机械臂(11)上固定连接有第二安装板(3)和焊接钳(31),所述焊接钳(31)贴合于所述第二安装板(3)的上表面,所述第二安装板(3)上开设有与焊丝配合的孔,多个所述焊丝收纳轮的其中两个得到焊丝穿过所述第二安装板(3)上的孔,其中一个所述焊丝收纳轮上的焊丝穿过所述焊接钳(31)的焊接部位并由所述送丝机构输送使用,另一个所述焊丝收纳盘上的焊丝的端部处于所述焊接钳(31)的焊接部位,其中一个所述焊丝收纳轮上的焊丝抽取完毕且底端移动至所述焊接钳(31)的焊接位置后,所述焊接钳(31)运行并将两个所述焊丝收纳轮上的焊丝焊接。
2.根据权利要求1所述的高效焊接机器人,其特征在于:所述第二安装板(3)的上表面固定连接有套管(32),未被使用的所述焊丝收纳轮上的焊丝端部插接于所述套管(32)内并被所述套管(32)弹性包覆,所述焊接钳(31)合并时可将所述套管(32)内的焊丝拉出所述套管(32)。
3.根据权利要求2所述的高效焊接机器人,其特征在于:所述安装轴(22)由所述送丝机构驱动旋转,所述安装轴(22)上设置有与多个所述焊丝收纳轮配合的电动卡块(23),所述电动卡块(23)径向滑动时抵接于相应的所述焊丝收纳轮的内壁,使得相应的所述焊丝收纳轮与所述安装轴(22)同步转动。
4.根据权利要求3所述的高效焊接机器人,其特征在于:所述送丝机构包括安装筒(6),所述安装筒(6)内转动连接有第一送丝轮(61)和第二送丝轮(62),所述焊丝穿过所述第一送丝轮(61)和所述第二送丝轮(62)之间,所述安装筒(6)上固定连接有送丝管(66),所述焊丝穿过所述送丝管(66)内。
5.根据权利要求4所述的高效焊接机器人,其特征在于:所述第一送丝轮(61)上同轴固定连接有主动轮(51),所述安装轴(22)的端部开设有环形槽(46),所述主动轮(51)与所述环形槽(46)之间传动连接有皮带(5)。
6.根据权利要求5所述的高效焊接机器人,其特征在于:所述安装轴(22)上位于所述环形槽(46)处径向滑动连接有多个环形阵列设置的扩张块(45),所述扩张块(45)径向外移时,所述主动轮(51)转动的线速度高于所述安装轴(22),所述扩张块(45)径向内移时,所述主动轮(51)的转动速度低于所述安装轴(22)。
7.根据权利要求6所述的高效焊接机器人,其特征在于:所述第二安装板(3)的上表面固定连接有活塞筒(33),所述活塞筒(33)内滑动连接有活塞杆(34),所述活塞杆(34)与所述焊接钳(31)固定连接,所述第一安装板(2)上固定连接有安装块(4),所述安装块(4)内开设有滑孔(41),所述滑孔(41)内滑动连接有滑杆(43),所述活塞筒(33)与所述滑孔(41)之间连通有第一管道(35),所述活塞筒(33)上连通有第二管道(36),所述滑孔(41)上连通有第三管道(42),所述第一管道(35)和所述第二管道(36)上均设置有单向阀,所述第三管道(42)上设置有电磁阀,所述滑杆(43)的端部固定连接有楔块(44),所述楔块(44)插接于所述安装轴(22)内,且所述楔块(44)与多个所述扩张块(45)磁性相吸,所述楔块(44)向所述安装轴(22)内滑动时可推动多个所述扩张块(45)外扩;
8.根据权利要求7所述的高效焊接机器人,其特征在于:所述第一机械臂(11)的侧壁固定连接有矩形板(52),所述矩形板(52)上滑动连接有矩形块(54),所述矩形块(54)的两侧均固定连接有弹簧(55),两个所述弹簧(55)均与所述矩形板(52)固定连接,所述矩形块(54)上转动连接有扩张轮(53),所述扩张轮(53)与所述皮带(5)传动连接。
9.根据权利要求8所述的高效焊接机器人,其特征在于:所述安装筒(6)上固定连接有两个导杆(64),所述导杆(64)上滑动连接有n形架(63),所述导杆(64)上套接有拉簧(65),所述拉簧(65)的两端分别与所述n形架(63)和所述安装筒(6)固定连接,所述第二送丝轮(62)的轴穿过所述安装筒(6)并转动连接于所述n形架(63),所述安装筒(6)上开设有与所述第二送丝轮(62)的轴配合的长圆孔,所述n形架(63)上设置有用于检测所述导杆(64)位置的位移传感器,所述位移传感器检测到所述n形架(63)与所述导杆(64)相对移动时,所述第三管道(42)上的电磁阀开启以使得所述滑孔(41)内的负压释放;
10.根据权利要求9所述的高效焊接机器人,其特征在于:所述安装筒(6)与所述第三机械臂(13)之间连接有三通管(7),所述三通管(7)远离所述安装筒(6)和所述第三机械臂(13)而当一端连通外部保护气源,所述三通管(7)上设置有电磁三通阀(71),所述电磁三通阀(71)可切换所述外部保护气源传输至所述安装筒(6)内或传输至所述第三机械臂(13)上的焊头内。
技术总结
本发明公开了一种高效焊接机器人,属于焊接领域,包括转动座、第一机械臂、第二机械臂和第三机械臂,转动座上固定连接有第一安装板,安装轴上安装有多个焊丝收纳轮,第一机械臂上固定连接有第二安装板和焊接钳,当其中一个焊丝收纳轮上的焊丝抽取完毕且底端移动至焊接钳的焊接位置后,焊接钳运行并将两个焊丝收纳轮上的焊丝焊接,其中一个焊丝收纳轮上的焊丝由送丝机构输送至第三机械臂上的焊头进行焊接使用,另一个焊丝收纳轮上的焊丝穿过第二安装板上的孔且端部处于焊接钳的中部,当两个焊丝焊接在一起后送丝机构再次启动,使得另一个焊丝收纳轮上的焊丝被收取使用,从而无需停机较长时间进行更换焊丝,提升了焊接机器人的焊接效率。
技术研发人员:赵伟,李怀景,张辉,高嵩,李允武,吕月霞,肖光春
受保护的技术使用者:齐鲁工业大学(山东省科学院)
技术研发日:
技术公布日:2024/4/8
- 还没有人留言评论。精彩留言会获得点赞!